
Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Sidman. conducta de evitación
Similar a Sidman. conducta de evitación (20)
Último
Último (20)
Sidman. conducta de evitación
- 1. CAPÍTULO 1 CONDUCTA DE EVITACIÓN* MURRAY SIDMAN INTRODUCCIÓN Los TRABAJOS PUBLICADOS acerca de la conducta de evitación cons- tituyen, en gran parte, una serie de variaciones sobre un solo tema. Pri- mero, se pone ansioso al sujeto a través de un proceso de condiciona- miento pavloviano; su conducta de evitación es reforzada cuando hace que termine el estado de ansiedad condicionada o la reduce. De una manera u otra, esta fórmula puede incluir todos los datos conocidos sobre la conducta de evitación. No hay excepciones. Siempre que surge una objeción, simplemente se revisan las propiedades de la ansiedad, a fin de que los nuevos hechos encajen en ella. Por ejemplo, si la tasa de la emisión de respuestas de evitación del sujeto es muy grande inmediatamente después de que ha recibido el choque, esto se debe a que la ansiedad es más intensa en ese momento; si, en otro expe- rimento, la probabilidad de la conducta de evitación es mayor antes de que el sujeto deba recibir el choque, entonces la ansiedad alcanza su punto máximo (Mowrer y Keehn, 1958). Si la lesión quirúrgica del sistema nervioso periférico hace que los animales aprendan más lenta- mente una nueva respuesta de evitación, pero no tiene ningún efecto en una respuesta que han aprendido antes de la operación, esto puede significar que "...los componentes periféricos de las reacciones de an- siedad son fundamentales en las primeras fases del proceso de aprendizaje de evitación, pero no lo Son en las fases posteriores..." (Solomon y Brush, 1956). Si el gradiente de generalización es empleado cuando hay estímulos exteroceptivos que avisan al sujeto de los choques pendientes, pero es plano cuando el procedimiento experimental no le proporciona al sujeto una serial de aviso, es porque la ansiedad que producen los * La preparación de este artículo fue financiada en parte por la subvención para investigaciones del PHS número MH-05408 del Instituto Nacional de Salud Mental, Servicio de Salud Pública. 532 EVITACIÓN DE OPERANTE LIBRE 533 estímulos internos se generaliza más ampliamente que la ansiedad que se genera exteriormente (Miller (1959). En vez de invocar a la ansiedad, algunos teóricos apelan a las fun- ciones aversivas definidas operacionalmente de los estímulos de aviso (Schoenfeld, 1950; Dinsmoor, 1954). No obstante, los procesos de con- dicionamiento son los mismos (el pavloviano y el operante), y cuando no hay ningún estímulo exteroceptivo de aviso que termine el organismo, se postula que es la propia conducta del sujeto la que lleva a cabo esta función (Hefferline, 1950; Sidman, 1953), o que algún proceso tem- poral desconocido que se origina dentro del sujeto toma el lugar de la ansiedad (Anger, 1963). Es probable que todos estos mecanismos estén implicados; sin em- bargo, mis propias investigaciones me han convencido de que la conducta de evitación es más intrincada de lo que indica cualquiera de estas formulaciones. También se me ha hecho evidente que los primeros expe- rimentos han influido desproporcionadamente en la mayoría de las formu- laciones actuales. Si tomáramos a los últimos experimentos como nuestro punto de partida, tal vez ni siquiera se nos ocurrieran algunas de las ideas que ahora aceptamos. Los datos no las necesitarían. En este capí- tulo resumiré algunos de los experimentos llevados a cabo por mis co- laboradores y por mi mismo. No trataré de formalizar los datos, sino que simplemente presentaré algunos de los problemas que plantean. EVITACIÓN DE OPERANTE LIBRE* El experimentador coloca a una rata blanca en una pequeña cámara de metal, de la cual pueden encontrarse descripciones detalladas en las referencias bibliográficas que se encuentran al final de este capítulo. En un extremo de la cámara surge una palanca que el animal puede pre- sionar; una rejilla de barrotes de acero inoxidable forma el piso de la cámara. Luego, por medio de un equipo electrónico programado automática- mente, el experimentador administra al animal una serie de choques eléctricos intensos, pero breves, a través del piso de rejilla. Dos contado- res que establecen ciclos programan los choques. Cuando el animal no presiona la palanca, el primer contador especifica el intervalo temporal * La técnica básica ha recibido varias denominaciones, por ejemplo, evitación no discriminada, método de espaciamiento temporal, evitación continua y evitación de Sidman. El término evitación de operante libre no es explicatorio en sí mismo; es• más preciso descriptivamente que el primero de ellos, no está tan comprometido teóricamente como el segundo y el tercero, y da un crédito histórico más adecuado que el cuarto.
- 2. EVITACIÓN DE OPERANTE LIBRE 535 200 R ESPU ES TA S UNA HORA 534 CAP. 10 CONDUCTA DE EVITACIÓN que hay entre los choques, llamado intervalo choque-choque. El animal puede posponer el choque presionando la palanca. La cantidad de tiem- po que el animal pospone el choque al apretar la palanca se denomina intervalo respuesta-choque, y es programado por el segundo contador. Los dos contadores nunca operan simultáneamente. Cada choque inicia de nuevo el intervalo choque-choque; la primera vez que el animal pre- siona la palanca después de recibir un choque, hace terminar el intervalo choque-choque y echa a andar el contador de respuesta-choque. El in- tervalo respuesta-choque se inicia de nuevo cada vez que el animal presiona la palanca. Al presionar la palanca, el animal se asegura de que el segundo contador no pueda administrar un choque antes de que haya transcurrido el intervalo respuesta-choque. SEGUNDOS litninitinulinthinialtuilimliminintilwilwilullinninuinulunitittli CH—CH CHOQUES I RESPUESTAS FIGURA 1. Representación diagramática del procedimiento de evitación de operante libre. Las letras CH-CH indican el intervalo choque-choque; las letras R-CH indican el intervalo respuesta-choque. o Ningún estímulo exteroceptivo avisa al animal que hay un choque pendiente. La duración del choque se fija en una fracción de segundo, de tal manera que el animal no hace terminar el choque. El animal pospone un choque cada vez que presiona la palanca. La figura 1 representa esquemáticamente el procedimiento. Si el animal no presiona la palanca, el oontador choque-choque determina la tasa base, o densidad, del choque. El grado en que el animal puede reducir la densidad base del choque es limitado solamente por la tasa y el patrón temporal de las respuestas emitidas en la palanca. Los intervalos choque-choque y respuesta-choque son iguales en la adquisición Los sujetos difieren considerablemente en su grado de adquisición de la conducta operante libre. Esta variabilidad no debe sorprender ni impresionar. Cuando simplemente se coloca a un sujeto en un ambiente desconocido, se le asigna una tarea y se espera que las contingencias de FIGURA 2. Registro acumulativo de la ejecución de un animal durante su primera expo- sición al procedimiento de evitación de operante libre. Para condensar la figura, el registro ha sido cortado en segmentos de aproximadamente una hora cada uno; los segmentos están numerados en su orden temporal. Las rayas oblicuas del registro indican los choques. reforzamiento se encarguen de todo; se deja al azar el manejo de las variables que puedan facilitar u obstaculizar el proceso de aprendizaje. Hively (1962) ha indicado que el procedimiento de aproximaciones sucesivas es efectivo en la enseñanza de discriminaciones de estímulos, porque el procedimiento dirige la atención del sujeto hacia las dimen- siones de estímulo pertinentes. Es probable que esto suceda también en el moldeamiento de respuestas; el sujeto aprende a prestar atención a los aspectos pertinentes de su propia conducta, así como a otras variables. Cuando no disponemos las contingencias de manera óptima durante el aprendizaje, los sujetos difieren entre sí en cuanto al tipo de variables
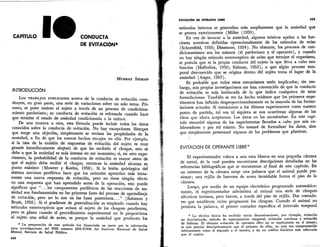
- 3. 6 ,,,,,,,ANIANNAANANAN~1%.~10, X WANNANMIAWAVAVON, VA% 5 ,. ,I•AVNAANAWAVAAMNWNNNAWM ~ 11, ;" ''' ZIW AA% AmAnA.• %I ".N»,, 4 NN,NINANMAAMINO,NAWN11,1N, MINA, k"' • 'W,M,`' ,M,V" S , NY, VO, 2 >A0s s'"‘ ,` "'`‘• "'""'' "' ANIN ,A, A. NO VOX,. ‘,•,• ;•1,,n; Aks1 ••Mk RATA AD-14 CHCH = RCH = 15 SEG •A w‘•,,, AWAA NNAN.A,,INIANIAINN.A.%N.NANNANANAA A ANANWNANANASIANNA,AAANN• AUMNUMNN SESION 1 8 7 MINAUMN, A001 536 CAP. 10 CONDUCTA DE EVITACIÓN EVITACIÓN DE OPERANTE LIBRE 537 que observan. También siguen secuencias temporales diferentes al esta- blecer contacto con los aspectos pertinentes de su propia conducta y de los estímulos ambientales. Al aprender una respuesta de evitación, los animales tienen múltiples oportunidades para desplegar tal variabilidad, tal vez más que en otras situaciones de aprendizaje, porque el reforzamiento de la evitación es menos inmediato. Esto les hace más difícil diferenciar los aspectos par- ticulares de su propia conducta que causan la evitación del choque. Además, hay varias posibles fuentes de reforzamiento para la respuesta de evitación; no todos los animales son reforzados por los mismos even- tos, y el control puede cambiar de una fuente de reforzamiento a otra durante las diferentes etapas del aprendizaje. Teniendo en cuenta estas consideraciones no cuantitativas, veamos algunos datos que ilustran diversas variedades de conducta durante la primera sesión de condicionamiento del animal. En primer lugar, ¿qué características del registro acumulativo de la figura 2 llaman la atención? Quizá la primera observación que hagamos es que el animal aprendió a presionar la palanca y a evitar los choques; respondió más de 2 000 veces en la sesión de ocho horas. Otra característica del registro es la disminución de la tasa de respuestas que se produjo conforme trans- currió la sesión; el animal presionó la palanca con más frecuencia en la segunda y la tercera horas que en las horas finales. Sin embargo, a pesar de que su tasa de presiones de la palanca era menor, la rata AC-53 recibió en la última hora diecisiete choques más que en la tercera hora. En tercer lugar, notamos que el animal dejó de presionar la pa- lanca con frecuencia, y recibió una serie ininterrumpida de choques antes de presionarla otra vez. La serie más larga de estos choques ininterrum- pidos se presentó en la primera hora, pero siguieron apareciendo algunos choques más cortos a intervalos irregulares a lo largo de la sesión. Final- mente, aunque es incuestionable que la rata aprendió a presionar la palanca, nunca fue muy lejos sin recibir por lo menos un choque. El tiempo más largo que el animal pudo mantenerse sin choques fue un periodo de cuatro minutos hacia el final de la sexta hora. La rata AD-14 (figura 3) presionó la palanca solamente 253 veces en aproximadamente ocho horas, y evitó algunos de los choques progra- mados. Sería difícil probar que este animal aprendió algo. No fue sino hasta el final de su cuarta sesión que la rata AD-14 presionó la palanca a una tasa sustancial. La rata CO-35 difiere de las ratas AD-14 y AC-53. Dicha rata em- pezó relativamente pronto a apretar la palanca en la primera sesión; después aumentó gradualmente su tasa de respuestas, y hacia el final de la sesión evitaba los choques con bastante efectividad. Pocos animales I"'• UNA HORA FIGURA 3. Véase la leyenda de la figura 2.- tienen ejecuciones tan buenas después de sólo seis horas de condicio- namiento. Las diferentes tasas de adquisición no son los datos de interés pri- mordial en este caso. Otras especies de sujetos (véase Ader y Tatum, 1961; Black y Morse, 1961) o las ratas que se encuentran en otros tipos de situaciones experimentales (véase Mowrer y Keehn, 1958) pueden aprender a evitar los choques más rápidamente de lo que indican estos registros. Lo interesante de las figuras 2, 3 y 4 se deriva de las incon- sistencias del propio proceso de adquisición que ellas revelan; por ejem- plo, las características notables del registro de la rata AD-14 (figura 3) son los casos aislados acaecidos en las horas cuarta, quinta, séptima y octava, en las que el animal presionó la palanca a una tasa elevada y redujo notablemente la frecuencia de los choques que recibía. A dife- rencia de la rata CO-35 (figura 4), que aumentó gradualmente la frecuencia y la duración de tales periodos de respuestas de evitación satisfactorias, el éxito de la rata AD-14 no pareció tener efectos dura- deros. El registro indica que la evitación satisfactoria, aunque tal vez sea necesaria, está lejos de ser una condición suficiente para el aprendizaje de evitación. 200 RE S PU ESTA S
- 4. 538 200 RESPUESTAS CAP. 10 CONDUCTA DE EVITACIÓN RATA CO —35 SESION 1 CHCH= RCH = 15 SEG 4 UNA HORA FIGURA 4. Véase la leyenda de la figura 2. Probablemente es incorrecto afirmar que la rata AD-14 no aprendió nada durante sus breves periodos de evitación satisfactoria. Una conclu- sión más probable sería la de decir que aprendió erróneamente las cosas. Es probable que la rata AD-14 no haya prestado atención al movimiento hacia abajo de la palanca —que era el elemento crítico de la respuesta de evitación—, sino más bien a algún otro aspecto de su conducta que EVITACIÓN DE OPERANTE LIBRE 539 estaba correlacionado imperfectamente con la presión de la palanca. Podríamos esperar que hubiera un condicionamiento más rápido de la evitación y menos variabilidad intersujetos si especificáramos una res- puesta de evitación que fuera un componente de todos los posibles pa- trones de conducta del sujeto; si el sujeto pudiera evitar el choque con cualquier movimiento, podría aprender con éxito y con rapidez, sin siquiera hacer una diferencia entre la realidad y la superstición. O po- dríamos enseñar al sujeto a prestar atención a la respuesta fundamental en situaciones 'semejantes a la evitación. Por ejemplo, si los animales pueden escapar y evitar el choque con la misma respuesta, aprenden la respuesta de evitación más rápidamente que los animales que no pueden hacer terminar el choque por sí mismos, o que los que tienen que usar respuestas diferentes para el escape y la evitación (Mowrer y Lamoreaux, 1946; Kamin, Campbell, Judd, Ryan y Walker, 1959). La transferencia facilitativa que hay del escape a la evitación ha sido atribuida a la mediación de un estado de pulsión (es decir, la ansiedad), que es común al escape como a la evitación (Solomon y Wynne, 1953). En vez de eso, la transferencia puede producirse a lo largo de los canales perceptuales. La respuesta de escape más fácilmente aprendida, con su reforzamiento inmediato, puede facilitar que el animal observe la parte de su conducta que es fundamental para la evitación. Aun cuando el registro de la rata AD-14 indica que el hecho de que el animal interrumpiera ocasionalmente la serie estable de choques no fue una condición suficiente para que hubiera aprendizaje de evitación, la figura 2 (rata AC-53) muestra que la exposición frecuente a los cho- ques sí desempeña una función importante. En base a este registro, que probablemente es el más típico de todos los que hemos observado, no sería difícil llegar a la conclusión de que la terminación de la serie de choques per se constituye una fuente de reforzamientos importantes para que el animal aprenda a evitar. Quizá sea igualmente probable que la ocurren- cia repetida y sucesiva de varios choques no sea una parte necesaria del proceso de adquisición, sino que es simplemente un subproducto de la imperfecta diferenciación que hace el animal de la respuesta fundamen- tal. La rata CO-35 (figura 4) experimentó un número relativamente pequeño de periodos de choques sostenidos después de la primera hora. O tales periodos no son realmente necesarios o tiene lugar algún tipo de transición (en algunos animales más rápidamente que en otros), en cl cual el control del proceso de reforzamiento se transfiere de una serie de choques a uno solo. La disminución de la tasa de respuestas que se produce al transcurrir la sesión (figura 2) es un fenómeno consistente, pero no necesariamente se limita sólo a la primera sesión de condicionamiento. En realidad, el
- 5. H-28 1 -.>•••••ci .. • .o.G-21 . • •• •... • ..0 u' • G-8 O-- —o --o o. - íg - / — / / 540 CAP. 10 CONDUCTA DE EVITACIÓN o FIGURA 5. Tasas de respuestas promedio de cuatro animales durante sesiones consecutivas de exposición al procedimiento de evitación de operante libre. animal puede aumentar su tasa de presión de la palanca durante varias sesiones consecutivas, antes de empezar a reducir su velocidad; esto se ilustra en la figura 5. No se sabe claramente si la disminución de la tasa de presión de la palanca que se presenta en la primera sesión refleja el mismo proceso que revela la disminución a largo plazo que se muestra en la figura 5. Esta última se halla correlacionada con un cambio del modo como el animal espacia temporalmente sus respuestas, cambio que se describirá con más detalle en la sección donde se analiza la discri- minación temporal. Los intervalos choque-choque y respuesta-choque son desiguales en la adquisición Cuando el intervalo choque-choque es más corto que el intervalo respuesta-choque, por lo general los animales aprenden a evitar más rápidamente que cuando los dos intervalos son iguales. La figura 6 mues- tra la ejecución de un animal en la primera sesión con un intervalo choque-choque de cinco segundos y un intervalo respuesta-choque de EVITACIÓN DE OPERANTE LIBRE 341 UNA HORA ---I FIGURA 6. Véase la leyenda de la figura 2. veinte segundos. Aunque esta combinación de intervalos no siempre pro- duce una conducta tan efectiva durante la primera sesión, pocos animales dejan de presentar una tasa sustancial de respuestas de evitación en la primera hora. También Black y Morse (1961) han demostrado la exis- tencia de un condicionamiento de evitación más rápido con el uso de intervalos choque-choque más cortos. La figura 7 muestra la efectividad de los intervalos choque-choque cortos de una manera diferente. La rata GF-11 tuvo intervalos choque- 200 RES PU ES TAS SESIONES CONSECUTIVAS — -o .41 G-4 I 11 LIII 111111 I 5 10 15 1
- 6. 542 CAP. 10 CONDUCTA DE EVITACIÓN RATA GF-11 CHCH = RCH = 20 SEG CHCH 5 SEG RCH 20 SEG UNA HORA 100 R ESPU ESTA S RATA 0-10 CHCH = 5 SEG RCH = 20 SEG UNA HORA 100 RESPU ESTA S FIGURA 7. Véase la leyenda de la figura 2. En la flecha, el intervalo choque-choque se redujo de 20 segundos a 5. choque y su respuesta-choque, cada uno de ellos igual a 20 segundos durante la mayor parte de las primeras dos horas de condicionamiento, y no aprendió la respuesta de evitación durante ese tiempo. Las ratas que responden con tan poca frecuencia durante las dos primeras horas rara vez aprenden a evitar más tarde, en la misma sesión, a menos que las condiciones cambien de alguna manera. Un método para mejorar los ma- los pronósticos es reducir el intervalo choque-choque. La rata GF-11 tardó un poco más de 45 minutos para reaccionar a este cambio con un aumento sustancial de su tasa de presión de la palanca. Al examinar la figura 2, notamos que la interrupción de una serie de choques constituyó una posible fuente de reforzamiento para la con- ducta de evitación del animal. La eficacia de los intervalos choque- choque cortos para facilitar el aprendizaje de evitación vuelve a hacer hin- capié en esta posibilidad. En la figura 7, se puede ver que el animal EVITACIÓN DE OPERANTE LIBRE 543 FIGURA 8. Véase la leyenda de la figura 2. rara vez experimentó el intervalo choque-choque en la última parte de la sesión; casi siempre presionó la palanca por lo menos una vez entre los choques. El patrón de conducta prevaleciente de la rata GF-11 con- sistía en hacer terminar el intervalo choque-choque de 5 segundos pre- sionando la palanca inmediatamente después de recibir un choque, y luego esperar que transcurriera el intervalo respuesta-choque de aproxi- madamente 20 segundos. En la figura 8 se ilustra otra vez este patrón de respuesta, que se observa con frecuencia en las ratas y en los monos. Es una fase por la cual pasa la mayoría de los animales antes de alcanzar un modo más efectivo de evitar los choques, y su duración puede variar de sólo unos cuantos minutos a varias sesiones; es posible, incluso, que algunos ani- males no progresen más, a menos que el experimentador tome medidas especiales. Dinsmoor (1962) ha demostrado que el reforzamiento admi- nistrado durante esta etapa es lo bastante poderoso para mantener res- pondiendo a los animales, aun cuando puedan terminar la serie de cho- ques sólo ocasionalmente.
- 7. RATA 46. EVITACION RESP./MIN INTERVALO CH-CH - - - SEG 2.5 5.0 10.0 15.0 30.0 2.5 26.5 o 4 22.4 cn 7 13.9 1 3 l0 11.0 1 15 6.6 o 20 5.8 -1 < 30 3.4 cc > 50 2.0 - 90 1.4 11501 0.7 LEYENDA •• • • 0.5 - - - 9.1 0.2 - - - 12.1 4.7 2.1 8.8 7.1 3.2 6.0 5.4 4.0 5.4 5.1 4.7 4.0 3.6 3.3 2.5 2.5 - - - 1.4 1.8 1.1 0.9 0--0 • 4. • Mi - - 0.5 0.7 2.6 1.9 1.3 0.7 0 10 20 30 50 90 150 INTERVALO R-CH - - SEG 544 CAP. 10 CONDUCTA DE EVITACIÓN 28 26 24 22 20 I8 I 6 I 4 I 2 lo 8 6 4 2 o FIGURA 9. La tabla muestra las tasas de respuestas promedio de un animal en cada combinación de intervalos choque-choque y respuesta-choque. Las tasas de respuestas se representan gráficamente de modo parcial en las curvas. (Según Sidman, 1953.) Parámetros temporales y mantenimiento de la conducta de evitación Después de que el animal hubo aprendido a presionar la palanca y evitar los choques, y que hubo tenido experiencias preliminares con varios valores de intervalos choque-choque y respuesta-choque, el expe- rimentador ajustó el intervalo choque-choque en un valor fijo, y determinó la tasa de respuesta de evitación del animal para una serie de intervalos respuesta-choque, mezclados. Luego cambió el intervalo choque-choque y registró las tasas de respuestas del animal, otra vez en varios intervalos respuesta-choque. El procedimiento se repitió hasta que al animal hubo generado una serie de curvas que relacionaban su tasa de respuestas de evitación con la longitud del intervalo respuesta-choque, y el conjunto de intervalos respuesta-choque estaban combinados con una serie de intervalos choque-choque diferentes. La figura 9 muestra los datos de este experimento (Sidman, 1953). EVITACIÓN DE OPERANTE LIBRE 545 Conforme el intervalo respuesta-choque disminuye a partir de sus valores más altos, el animal presiona la palanca con más rapidez, hasta que alcanza una tasa máxima para un intervalo choque-choque dado. Con disminuciones continuas del intervalo respuesta-choque, la tasa de respuestas de evitación disminuye repentinamente a partir de su valor máximo. Los dos segmentos de las curvas se intersecan en un intervalo respuesta-choque cuyo valor es determinado por el intervalo choque- choque; con intervalos choque-choque más breves, podemos usar inter- valos respuesta-choque más cortos y seguir manteniendo la conducta. En un análisis preliminar, Anger (comunicación personal) examinó la manera como los contadores choque-choque y respuesta-choque pue- den interactuar con la conducta del animal, a fin de alterar el número de choques que éste recibe. Su análisis ayuda a esclarecer por lo menos una característica de las curvas similares a las de la figura 9: específica- mente, el intervalo respuesta-choque en el que el animal deja de presio- nar la palanca (los puntos que se encuentran en el extremo izquierdo de la figura 9). Cuando el intervalo choque-choque es más largo que el intervalo respuesta-choque, el animal puede producir realmente choques más frecuentes presionando la palanca. Por ejemplo, con el contador choque-choque ajustado en 20 segundos, el animal recibiría un choque cada 20 segundos si no presionara la palanca. Pero con el contador respuesta-choque ajustado en 10 segundos, si el animal presionara la palanca una vez en la primera mitad del intervalo choque-choque, reci- biría el choque siguiente 10 segundos después de la respuesta -más pronto que si se hubiera permitido que el contador choque-choque ad- ministrara el choque. Suponiendo que el animal responda al azar en el tiempo, alcanzamos un punto crítico cuando el intervalo respuesta-choque llega a medir menos de la mitad del intervalo choque-choque. En este valor, la pro- babilidad de que el animal aumente la frecuencia de los choques pre- sionando la palanca a ciertas tasas llega a ser mayor de 0.5 -mayor que la probabilidad de posponer el choque. Anger volvió a representar grá- ficamente los datos de la figura 9, usando en la abscisa no el intervalo respuesta-choque, sino la proporción de los intervalos respuesta-choque con relación a los intervalos choque-choque. Encontró que, en realidad, los animales casi siempre dejaban de presionar la palanca siempre que la proporción de intervalos respuesta-choque y choque-choque estaba dentro de los límites de 0.40 y 0.55. También la localización de los puntos máximos en curvas como las de la figura 9, refleja la proporción crítica de 0.5. Cuando el intervalo choque-choque es igual a O, la curva no muestra ninguna serial de pasar a través de un punto máximo, incluso cuando el intervalo respuesta- RESPUESTAS P O R MINUTO
- 8. CAP. 10 CONDUCTA DE EVITACIÓN choque disminuye hasta 1.7 segundos (Sidman, 1953). En la mayoría de los demás casos, la tasa de presión de la palanca del animal continúa aumentando con los intervalos respuesta choque-choque más cortos, pero disminuye repentinamente al acercarse a la proporción crítica. En prin- cipio, puede considerarse a esta disminución repentina de la tasa de res- puestas como un cambio no continuo; por tanto, el punto máximo tam- bién es determinado por la proporción crítica. Las curvas en las que el ala positiva parece ser una función gradual más que continua, indican probablemente que nuestra suposición de que las respuestas se emiten al azar en el tiempo es inadecuada. La probabilidad de que el animal pueda aumentar la frecuencia de los choques respondiendo, dependería de la tasa con que presionara la palanca y de la manera como espa- ciara sus respuestas. Entonces, la frecuencia de los choques, controlada directamente por el intervalo choque-choque, puede determinar las inclinaciones positivas y la localización de los puntos máximos en las curvas de la figura 9. Sin embargo, ¿qué se puede decir de las inclinaciones negativas y más extensivas de estas curvas? La forma de los gradientes que se encuentran a la derecha de los puntos máximos no tiene ninguna relación consistente con el intervalo choque-choque (Sidman, 1953). Sería inútil que yo tra- tara de resumir aquí mis muchas horas de vanos esfuerzos para derivar cuantitativamente estas funciones. Ni siquiera he podido apelar con éxi- to a la observación de "sentido común" de que los animales deben res- ponder más rápidamente con intervalos respuesta-choque más cortos si han de continuar evitando los choques. Los datos revelan varios casos en los que los animales realmente recibieron más choques que los que habrían recibido si hubieran mantenido inmutable su tasa de presión de la palanca en los intervalos respuesta-choque más cortos.* Queda por encontrar una respuesta cuantitativamente verificable a la pregunta de por qué los animales aumentaron su tasa de respuestas de evitación con los intervalos respuesta-choque más cortos. Discriminación temporal La técnica de evitación de operante libre asegura que el sujeto reciba un choque siempre que deje de apretar la palanca dentro del intervalo respuesta-choque o choque-choque. Las relaciones temporales fijas que existen entre los choques y las respuestas de presionar la palanca, indi- * Esta conclusión se basó en la suposición de que los animales espaciaban sus respuestas al azar en el tiempo (véase, por ejemplo, a Mueller, 1950). Los datos no justificaban completamente esta suposición, pero hay datos que indican que los aspectos que no se ajustan a ella son resultado de procesos especiales (véanse los pá- rrafos siguientes y también a Sidman, 1954; 1955). EVITACIÓN DE OPERANTE LIBRE can que puede estar implicada alguna forma de condicionamiento tem- poral cuando el sujeto aprende a evitar. En las figuras 10-13 se presentan pruebas acerca de esta posibilidad; estos datos se obtuvieron con inter- valos choque-choque y respuesta-choque de 20 segundos. Un método para demostrar la presencia o ausencia de una discrimi- nación temporal consiste en registrar la cantidad de tiempo que el animal deja transcurrir entre cada una de sus respuestas sucesivas de presionar la palanca. Estos tiempos en - tre respuestas pueden considerarse como una distribución de frecuencia. Si verdaderamente el animal ha formado una discriminación temporal precisa, esperaríamos encontrar que general- mente presione la palanca y luego deje transcurrir casi todo el intervalo respuesta-choque antes de presionar otra vez. El histograma de la figura 10, registrado durante la novena sesión de condicionamiento de evitación, de 7.5 horas de duración, es casi un reflejo de lo que esperaríamos encontrar si la rata D-4 hubiera formado una discriminación temporal. Para efectos de contraste, véase el histo- grama de la figura 11. Sin embargo, Anger (1956) ha señalado que la distribución de fre- cuencia de los tiempos entre respuestas puede ser un indicador relativa- mente insensible de los procesos temporales, e incluso puede ocultarnos su existencia. Los tiempos cortos entre respuestas pueden predominar simplemente porque no hay tantas oportunidades para que haya tiempos largos< entre respuestas. La curva punteada de la figura 10 ilustra esto último. He vuelto a representar gráficamente los datos del histograma para mostrar, en porcentajes, cómo muchos de los tiempos entre respues- tas fueron mayores que cada tiempo entre respuestas particular. Por ejemplo, un 100% de los tiempos entre respuestas tenían que ser mayores de cero segundos; pero después del 33% de sus respuestas, el animal presionó otra vez la palanca dentro de dos segundos, dejando sólo el 67% de los tiempos entre respuestas al resto de la distribución de fre- cuencia. Asimismo, entre dos y cuatro segundos después del anterior, tuvo lugar un 22% adicional de las respuestas del animal, dejando sólo el 45% del total de tiempos entre respuestas disponibles mayores de cuatro segundos. La población de los tiempos entre respuestas a partir de los cuales hay que calcular nuestras probabilidades, debe disminuir confor- me nos movemos a lo largo de la abscisa de la gráfica 11. Entonces, el histograma se deriva del número de tiempos entre res- puestas en cada clase. La distribución acumulativa (línea quebrada) muestra cómo disminuye el número de oportunidades para los tiempos largos entre respuestas. Dividiendo la altura de cada barra del histograma entre el valor correspondiente que se encuentra en la distribución acumu- lativa, tenernos en cuenta las oportunidades que disminuyen y obtenemos 546 547
- 9. 548 CAP. 10 CONDUCTA DE EVITACIÓN 1.00 .90 .80 .70 .60 .50 40 .30 .20 .10 0- 2- 4- 6- 8- 10-1 14-16-1 t= TIEMPO ENTRE RESPUESTAS (seg) FIGURA 10. Evitación de operante libre. Tres métodos para representar la probabilidad de los tiempos entre respuestas. El histograma muestra el número de tiempos entre res- puestas (TERs) que hubo en cada clase, dividido entre el número total (N) de tiempos entre respuestas habidas en la sesión; la curva punteada muestra que el porcentaie de los TERs totales fue mayor que el límite inferior de cada clase de TERs (t); la curva de rayas muestra el número de TERs que hubo en cada clase, dividido entre el número total de oportunidades (OP) por TERs habidos en esa clase. las probabilidades que se muestran en la curva de rayas de la figura 10. Anger (1956; 1963) ha denominado a esta curva "tiempos entre res- puestas por oportunidad" (TER/OP) y ha argumentado persuasivamente que constituye el indicador más sensible de las probabilidades del tiempo entre respuestas. EVITACIÓN DE OPERANTE LIBRE 0- 2- 4- 6- 8- 10-12- 14-16- 18-20- t = TIEMPO ENTRE RESPUESTAS (seg ) FIGURA 11. Véase la leyenda de la figura 10. La curva de TER/OP de la figura 10 muestra la existencia de una discriminación temporal imperfecta, aunque el histograma correspon- diente oscurece la discriminación. No obstante, hay varios campos en los que podemos poner en tela de duda la manera como los procesos tem- porales son pertinentes mientras el animal está aprendiendo a evitar los choques. Primero, la magnitud de la discriminación es relativamente pequeña, y sus probabilidades de respuesta varían solamente de 0.31, en la clase de 4-6 segundos, a 0.50 en la clase 16-18 segundos.* Segundo, * Debido al número relativamente pequeño de oportunidades para responder quo tiene el animal después de las pausas largas, los puntos finales de la curva están PROBAB I L I D AD 549 PROBAB I LIDAD
- 10. -ro RATA G-18 SESION 5 N = 4697 % ter > t t t / . 1 ... 1 / . ' o__a' .. cl ter .. N 1 1.00 .90 .80 .70 .60 PROBAB I L I DAD .50 .40 .30 .20 .10 o 550 CAP. 10 CONDUCTA DE EVITACIÓN la discriminación es relativamente imprecisa; la probabilidad de que el animal presione la palanca empieza a elevarse al principio del intervalo respuesta-choque y sólo aumenta gradualmente conforme transcurre el intervalo. La rata D-4 hizo patente una discriminación temporal tan pequeña e imprecisa como ésta, después de 217.5 horas de entrenamiento. De nuevo, véase la figura 11 para hacer comparaciones. Tercero, podemos preguntarnos qué cantidad total de conducta de evitación explica la discriminación temporal. Cuando el choque se hizo inminente, la rata D-4 llegó realmente a aceptar un porcentaje cada vez mayor de sus oportunidades para presionar la palanca; pero el número real de oportunidades fue pequeño. Podemos escoger diez segundos —la parte media del intervalo respuesta-choque— como punto de división arbitrario; sólo el 12% de los tiempos entre respuestas del animal fueron mayores de diez segundos. De nuevo, para hacer comparaciones, la rata SD-8 (figura 11) espació sus respuestas de tal manera que el 94% de sus oportunidades para responder se produjeron en la última mitad del intervalo respuesta-choque. El problema, entonces, no radica en determinar si la discriminación temporal está implicada en la conducta de evitación; las figuras 10, 11 y otras presentan pruebas evidentes de que así es. No obstante, la pe- queña magnitud de la discriminación de la rata D-4, su imprecisión relativa y la pequeña proporción de las respuestas del animal que estu- vieron implicadas en la discriminación, indican que los procesos tempo- rales del tipo ilustrado por la figura 10 son secundarios en la adquisición de la conducta de evitación. Como puede suponerse al observar la figura 11, estos procesos temporales pueden desempeñar un papel importante en el mantenimiento de la conducta, cuando el animal ha aprendido. Incluso cuando la discriminación temporal aparece antes, más clara- mente, de lo que apareció en la rata D-4, podemos poner en duda su primacía en la adquisición. La figura 12 ilustra una discriminación más avanzada que se estableció muy pronto, en la quinta sesión. Sin embargo, otra comparación con la figura 11 indica que los procesos temporales todavía no ejercen todo el control. Podemos notar, además, que las ratas D-4 y G-18 recibieron 24 y 40 choques, respectivamente, en las sesiones ilustradas, resultados que se pueden comparar favorablemente con los de la rata SD-8, que recibió 83 choques. La conducta de evitación efi- ciente, en términos del número de choques que el animal evita con éxito, puede establecerse antes de que la discriminación temporal implique una cantidad sustancial de la conducta de evitación total del animal. sujetos a fluctuaciones extremadas al haber cambios pequeños en el número de las pausas largas. Por tanto, debe interpretarse conservadoramente el salto final a la probabilidad de 1.00. EVITACIÓN DE OPERANTE LIBRE 0- 2- 4- 6- 8- 10- 12- 14- 16- 18-20- t = TIEMPO ENTRE RESPUESTAS (seg ) FIGURA 12. Velase la leyenda de la figura 10. Hasta ahora, hemos examinado los tiempos entre respuestas; también podemos ver los tiempos choque-respuesta, es decir, el intervalo temporal que transcurre entre cada choque y la respuesta de evitación subsiguiente del animal. Las figuras 13A y 13B muestran las funciones de probabi- lidad de cada intervalo temporal por separado. Aquí, el animal recibió choques suficientes para producir probabilidades confiables para los tiem- pos choque-respuesta. Vemos que hay dos patrones temporales distintos que existen "uno al lado del otro" en la misma sesión. En los intervalos temporales que empiezan con choques (figura 13A), la rata G-38 551
- 11. V I • b• ter _/N k. ter—r • op 1... / p% /0 • cr ..-. RATA G-38 - SESION 7 % ter > t N = 3198, 552PROBA BILIDAD 1.00 .90 .80 .70 .60 .50 .40 .30 .20 .10 o RATA G-38 SESION 7 N = 188 A ttch—r > t CAP. 10 CONDUCTA DE EVITACIÓN 0- 2- 4- 6- 8- 10- 12- 14- 16-18- 20- 0- 2- 4- - 8- 10- 12- 14- 16- 18- 20 t= TIEMPO t= TIEMPO CHOQUE—RESPUESTA ENTRE RESPUESTAS (segundos) (segundos) FIGURA 13. A. Es similar a las figuras 10-12, excepto en que los intervalos se hallan entre cada choque y la respuesta siguiente (tiempos choque-respuesta, o TCH-R), en vez de entre las respuestas. B. Véase la leyenda de la figura 10. muestra una discriminación temporal relativamente avanzada; en la fi- gura 13B, los intervalos respuesta-respuesta (tiempos entre respuestas) indican solamente una discriminación temporal mal establecida. La figura 13A contiene sólo aproximadamente el 5% de todas las respuestas de evitación del animal, lo cual indica, de nuevo, que la discriminación temporal puede considerarse un producto, más que un factor causal, del condicionamiento de evitación. Aún no se sabe si la discriminación tem- poral basada en los choques se establece siempre más pronto que la que se basa en las respuestas, ni si las dos discriminaciones dependen entre sí de alguna manera. ¿Por qué desarrollan una discriminación temporal los animales? Una de las consecuencias de que el tiempo entre respuestas sea más largo es que el animal pospone el choque por un periodo más largo. (Esto se EVITACIÓN DE AJUSTE 553 refiere, por supuesto, a los tiempos entre respuestas que no son lo bastante largos para encender el choque.) El animal gana más tiempo sin choques emitiendo dos respuestas bien espaciadas, que emitiendo dos respuestas cercanas entre sí. Aun cuando es posible que el animal pueda, por azar, distribuir eficientemente sus primeras respuestas de presión de la palanca y ser reforzado de esa manera, desde el principio, por hacer una discri- minación temporal, esto no es probable. Es más probable que la dis- criminación temporal sea un proceso de segundo orden, cuyas respuestas espaciadas temporalmente surgen a través del reforzamiento diferencial de una tasa de respuestas mayor y menos eficiente. Podemos comprobar esto por medio de dos procedimientos adicionales para condicionar la conducta de evitación: la evitación de ajuste y la evitación de ciclo fijo. EVITACIÓN DE AJUSTE -- La rata recibe un clibque cada cinco segundos en tanto no presione la palanca. Sin embargo, cada vez que presiona la palanca agrega cinco segundos al tiempo que debe transcurrir antes del choque siguiente. Por ejemplo, si el animal presionara la palanca dos segundos antes de tener que administrar el choque, éste no se produciría sino hasta que hubieran, transcurrido siete segundos (dos más cinco) ; si el animal presionara otra vez después de haber transcurrido un segundo más, perdería uno de los siete segundos que había acumulado, y el siguiente choque se produciría once segundos después (seis más cinco). Entonces, en cualquier mo- mento, el tiempo restante antes de que la rata pueda recibir un choque dependerá conjuntamente de qué tan frecuentemente ha presionado la palanca y de cuánto tiempo ha transcurrido desde que recibió el último choque. Por tanto, dentro de estos límites, el animal puede ajustar la duración del intervalo respuesta-choque. Una de las características del procedimiento de ajuste es que la cantidad de tiempo a salvo que gana el animal cada vez que presiona la palanca es independiente del intervalo que ha transcurrido desde que emitió la respuesta precedente. Cada vez que presiona la palanca, inde- pendientemente de cuándo emitió la última respuesta, el animal recibe cinco segundos adicionales en los que no hay la posibilidad de recibir un choque. No hay ningún reforzamiento diferencial de los tiempos largos entre respuestas. La figura 14 resume el patrón temporal de presión de la palanca de un animal durante su primera sesión de condicionamiento con el proce- dimiento de ajuste. Aquí no hay ninguna prueba que indique que estu- viera implicado el condicionamineto temporal. Incluso después de varios cientos de horas de exposición al procedimiento de ajuste, los animales
- 12. 1.00 .90 RATA RS-99 SESION 1 N = 7623 ter .80 .70 .60 .50 • • ter V op • • b Vter > t .40 .30 .20 .10 o PORCENTAJE D E RES PUESTAS TO TA LES .20 .10 o .20 .10 o .20 .10 554 CAP. 10 CONDUCTA DE EVITACIÓN 0- 5- 10- 15- 20- 25-30- 35- 40-45- 50- t = TIEMPO ENTRE RESPUESTAS (seg ) FIGURA 14. Similar a la figura 10, excepto en que el procedimiento fue de evitación de ajuste. no presentan ninguna prueba consistente de que haya una discrimina- ción temporal (Sidman, 1962a). Esto contrasta notablemente con el procedimiento de operante libre, en el cual el animal evita los choques más efectivamente espaciando mucho sus respuestas en el tiempo. El pro- cedimiento de ajuste da igual peso a cada respuesta de evitación y esto puede ayudar a explicar por qué no se presenta la discriminación tem- poral. El procedimiento de ajuste sí proporciona la oportunidad de castigar selectivamente las respuestas que se espacian con más de cinco segundos EVITACIÓN DE AJUSTE 555 - CN-7 _ - ''--- ------..'s - rsp ch ci 2492 257 1336 — _ tIIIIII I 1 I t - CN-72 - ......, ----....„---------, _ -1180 1020 1312 11_111 III II i - CQ-24 _ 760 1082 1309 — -------<__,--....„_..„--- - — _ IIIIIIIIIii - CO-40 - 4------------------___0_, —3456 — _ IIIIIIIIIIi 368 1326 0 3 6 9 12 15 DECIMOS DE CICLO SUCESIVOS (segundos) FIGURA 15. Porcentaje de las respuestas totales emitidas por cuatro animales en cada segmento sucesivo de 1.5 segundos del ciclo de 15 segundos, durante su primera sesión en el/ procedimiento de evitación de ciclo fijo. Los •números que están a la derecha muestran las respuestas totales (RSP), los choques totales (CH) y los ciclos totales (Cl) habidos durante la sesión. entre sí. Si el animal espacia varias respuestas sucesivas con menos de cinco segundos entre sí, el siguiente choque puede producirse solamente después de un intervalo temporal relativamente largo, dependiendo del número de respuestas emitidas en el "estallido". Después de un intervalo entre respuestas mayor de cinco segundos, el choque puede producirse más pronto que después de un estallido, dependiendo de la longitud del tiempo entre respuestas y de la localización temporal del animal con respecto al choque. Si el animal pudiera hacer esta discriminación muy pronto, en su primera sesión de condicionamiento, esto podría explicar el hecho de que el 88% de las respuestas de la figura 14 estén separadas por menos de cinco segundos. Sin embargo, los estallidos de respuestas rápidas también son comunes en las primeras sesiones del procedimiento de operante libre, donde no tienen ninguna ventaja con respecto a la demora del castigo. Más probable sería suponer que los estallidos de respuestas tienen el mismo origen en ambos procedimientos, pero que tienden a disminuir en el procedimiento de operante libre, en donde cons- PROBABIL IDAD
- 13. CAP. 10 CONDUCTA DE EVITACIÓN .tituyen un modo relativamente ineficiente de que el animal evite los choques. EVITACIÓN DE CICLO FIJO La sesión experimental se divide en ciclos sucesivos de 15 segundos. Los choques se programan para administrarlos a la rata al final de cada ciclo, es decir, cada 15 segundos. El animal sólo tiene que presionar la palanca una vez durante cualquier ciclo, para suprimir el choque al final de ese ciclo; las respuestas adicionales emitidas durante ese ciclo en particular no tienen ningún efecto programado. Cada 15 segundos em- pieza un nuevo ciclo, exactamente en el punto en donde el animal recibe un choque o tendría que haber recibido un choque si no lo hubiera evitado con éxito. Este procedimiento es diferente del de evitación de operante libre, en el cual el sujeto inicia un nuevo ciclo cada vez que presiona la palanca. Mediante el procedimiento de ciclo fijo, podemos examinar la con- ducta para buscar evidencias de discriminación temporal registrando el número de veces que el animal presiona la palanca en los segmentos sucesivos de 1.5 segundos de cada ciclo de 15 segundos. Si el sujeto distribuyera uniformemente sus respuestas a lo largo de los diez subinter- valos del ciclo, cada intervalo contendría el 10% del total. La figura 15 ilustra la distribución temporal de las respuestas de presión de la palanca de cuatro ratas durante su primera sesión de condicionarniento. Se con- taron todas las respuestas emitidas en cada ciclo. Las probabilidades se aproximan a 0.10; si de algún modo hay alguna tendencia, ésta es hacia las probabilidades de respuesta más bajas, en la última parte del ciclo. Aparentemente, estos animales •aprendieron a presionar la palanca sin la ayuda de una discriminación temporal. Dos de los animales, CN-7 y CO-40, aprendieron a evitar más efectivamente que los demás, pero todos ellos mostraron la misma distribución uniforme de sus respuestas a lo largo del ciclo. Hasta este punto, los datos indican que la discriminación temporal no es fundamental para que los animales aprendan a evitar los choques. Los factores temporales entran en juego más tarde y eventualmente pue- den ejercer un control considerable sobre la conducta de evitación del animal. Cualesquiera que sean estos factores temporales, no parece haber necesidad inmediata de considerar que la naturaleza de su control es diferente de cualesquiera otros eventos que le sirvan al animal como indicios. La pregunta fundamental es: ¿Cómo adquieren y mantienen los procesos temporales un control discriminativo sobre la conducta de un animal? El animal debe ser capaz de usar los procesos temporales EVITACIÓN DE INTERVALO LIMITADO 557 para aumentar la efectividad de su conducta de evitación; como cual- quier estímulo discriminativo, los factores temporales deben llevar a con- secuencias reforzantes si van a asumir el control de la conducta. El procedimiento de ciclo fijo tiene un intervalo choque-choque con- sistente. De cualquier modo, incluso las ratas CN-72 y CQ-24, cada una de las cuales recibió más de 1 000 choques durante sus primeras sesiones de condicionamiento, no mostraron que hubiera una discrimi- nación temporal basada en los choques. Después de 15 sesiones de 6.5 horas, todavía no había evidencias de discriminación tern:oral (Sidman, 1962b). En las últimas sesiones, cuando los animales recibieron sola- mente unos cuantos choques, la discriminación temporal basada en el choque no pudo haber sido pertinente para la conducta de evitación de los animales. Pero si el número de choques que recibe un animal es lo suficientemente alto para controlar un segmento sustancial de sus res- puestas de evitación, y si el animal puede usar la relación temporal para evitar el choque más efectivamente, se demuestra la existencia de una discriminación temporal. Estas condiciones produjeron los datos de la fi- gura 13A. Incluso, si el animal no obtiene ningún beneficio real de uno discriminación temporal, el espaciamiento consistente de los choques en el tiempo proporciona la oportunidad para que los procesos temporales sc correlacionen adventiciamente con el reforzamiento. Las siguientes variaciones del procedimiento de ciclo fijo ilustrar algunas discriminaciones temporales adicionales. EVITACIÓN DE INTERVALO LIMITADO Primero se expone al animal al procedimiento de evitación de cid( fijo que se describió anteriormente. Puede presionar la palanca en cual. quier momento durante un ciclo y evitar el choque que, de otro modo, sc produciría al final del ciclo. Por tanto, el intervalo de evitación es igua a la longitud del ciclo total, 15 segundos. Entonces reducirnos a tres segundos el intervalo de evitación. Sola. mente presionando la palanca durante este intervalo limitado puede e animal evitar el choque que se debe administrar al final del ciclo. E intervalo puede situarse en diferentes partes del ciclo, pero aquí descri biremos solamente dos casos. En uno, el intervalo de evitación constitur los últimos tres segundos del ciclo. El animal puede evitar el choqui presionando la palanca de 12 a 15 segundos después del principio de ciclo; las respuestas emitidas al principio del ciclo no tienen ningún efee to programado. En la otra variación, el intervalo de evitación está situad( entre 7.5 y 10.5 segundos. El animal no puede evitar el choque respon diendo durante los primeros 7.5 segundos o los últimos 4.5 segundo 556
- 14. CN-72 3344 rsp 723 rsp 4734 rsp 168 rsp 121 rsp 466 ch 1169 ch 678 ch 1251 ch 1249 ch 1051 ci 1248 ci 1261 ci 1258 ci 1257 ci 29 27 28 O 3 6 9 12 15 0 3 6 9 12 15 0 3 6 9 12 15 03 6 9 12 15 0 3 6 9 12 15 DECIMOS DE CICLO SUCESIVOS (segundos) .14 .12 .10 .08 .12 .10 .08 .22 .20 .18 .16 .14 .12 .10 .08 .06 558 CAP. 10 CONDUCTA DE EVITACIÓN EVITACIÓN DE INTERVALO LIMITADO 559 CO-40 . - _ '1 111_1121 1 rsp ch ci 4951 481 1253 - CN-72 : -9043 , 221 1269 Iii CN-7 _ _ - - _ _ iiII![IIII_ - - - _ - - - _ _ - _ _ -2188 634 1250 0 3 6 9 12 15 DECIMOS DE CICLO SUCESIVOS (segundos) FIGURA 16. Véase la leyenda de la figura 15. Aquí el procedimiento consistió en una evitación de intervalo limitado. Una respuesta sirvió para evitar el choque. solamente en el intervalo de 12 a 15 segundos. (Según Sidman, 1962b.) del ciclo; al final del ciclo solamente puede mantenerse sin recibir cho- ques presionando la palanca por lo menos una vez entre 7.5 y 10.5 segundos. La figura 16 ilustra las discriminaciones temporales que hacen los animales después de que limitamos el intervalo de evitación a los tres segundos finales del ciclo. Un número suficiente de ciclos empezó con un choque para dar a los animales •una cantidad sustancial de puntos de referencia, con base a los cuales se podían situar dentro del ciclo. Además, se reforzó diferencialmente a los animales por responder cerca del final del ciclo. Ambas condiciones fueron satisfechas por el estable- cimiento y mantenimiento de una discriminación temporal basada en el choque. PORC ENTAJE DE R ESPU ESTAS TOTAL ES 32 28 24 20 16 12 4 FIGURA 17. Véase la leyenda de la figura 15. Cinco sesiones consecutivas de evitación de intervalo limitado, con el intervalo de evitación entre 7.5 y 10.5 segundos. (Según Sidman, 1962b.) Cuando el intervalo de evitación estaba situado cerca del centro del ciclo, de 7.5 a 10.5 segundos, los animales evitaron con menos efecti- vidad y recibieron un mayor número de choques. La figura 17 muestra cinco sesiones consecutivas de un animal. Aun cuando la tasa de res- puestas de la rata CN-72 fue alta durante dos de estas sesiones, fue baja en las otras y, eventualmente, la conducta de evitación casi desapareció. Sin embargo, la discriminación temporal predominó, aunque constituía una discriminación "errónea". Cuando el intervalo de evitación se produce al final del ciclo, el animal tiene pocas dificultades, pues la conducta de evitación satisfac- toria está correlacionada positivamente con el ciclo temporal generado por los choques periódicos. Pero cuando el intervalo de evitación se produce cerca de la mitad del ciclo, esta correlación se rompe. Las res- puestas de evitación satisfactorias deben estar fuera de fase con los choques. Sería posible ayudar al animal a evitar el choque con éxito, sin importar el lugar del ciclo en que estuviera situado el intervalo de evi- tación. Por ejemplo, el estímulo A podría estar encendido en todo mo- mento, a menos que el animal presionara la palanca durante el intervalo de evitación. Una respuesta efectiva haría terminar el estímulo A y encendería al estímulo B, que permanecería encendido hasta el inicio del siguiente intervalo de evitación. Todos los choques se administrarían en-
- 15. 562 100 RESPUESTAS RATA AN-22 / 6 CHCH 150 SEG RCH 30 SEG 5 1 CAP. 10 CONDUCTA DE EVITACION UNA HORA FIGURA 20. Ejecución de un animal en la evitación de operante libre, después de la exposición a la evitación de intervalo fijo con los mismos parámetros temporales. intervalo respuesta-choque, puede seguir disminuyendo la densidad del choque respondiendo, incluso, cuando el intervalo choque-choque tiene más del doble de duración que el intervalo respuesta-choque. La discriminación temporal que se ilustra en la figura 19 también hace posible que el animal mantenga con éxito la conducta de evitación en INTERVALOS DE RESPUESTA-CHOQUE VARIABLES 563 condiciones normalmente desfavorables. En la figura 20 aparece un ejemplo. Después de que tuvo mucha experiencia con un intervalo fijo de dos minutos y un intervalo respuesta-choque de 30 segundos, se hizo regresar al animal a una evitación de operante libre con los mismos parámetros temporales. Debido a la pausa larga que hacía después de cada choque, el animal rara vez hizo que los choques fueran adminis- trados más próximos entre sí que el intervalo choque-choque (pueden verse ejemplos al principio de la segunda hora y al final de la sexta hora) y siguió apretando la palanca a una tasa respetable. La discrimi- nación temporal desempeña un papel importante para ayudar al animal a evitar los choques o para obstaculizarlos. INTERVALOS DE RESPUESTA-CHOQUE VARIABLES En el procedimiento de evitación de ajuste, cada vez que el animal presiona la palanca agrega cinco segundos al tiempo que queda antes de poder administrar un choque. Entonces, es inevitable que varíe el intervalo respuesta-choque; sin embargo, el experimentador no puede especificar de antemano las variaciones, pues éstas dependen de la tasa y la distribución temporal de las respuestas de los animales. En los experimentos que vamos a describir ahora, las variaciones del intervalo respuesta-choque fueron contingentes sobre el choque. Un in- tervalo respuesta-choque dado seguía en acción hasta que el animal permitía que ocurriera el choque. El intervalo cambiaba después de cada choque. Este procedimiento nos permite especificar de antemano la se- cuencia de intervalos respuesta-choque que hará contacto realmente con la conducta, pues el animal debe recibir un choque en un intervalo respuesta-choque dado, a fin de poder programar un nuevo intervalo. Primero se entrenó a cinco animales a presionar la palanca y evitar el choque mediante el procedimiento de evitación de operante libre, usando un intervalo respuesta-choque de 20 segundos. Luego se les aplicó el procedimiento variable, en el que los intervalos respuesta-choque eran de 4, 10, 15 y 20 segundos, y cambiaban después de cada choque. En las últimas fases del experimento se agregó un quinto intervalo: de 25, 40 u 80 segundos. Además, también se condicionó desde el principio a varios animales en el procedimiento de intervalo respuesta-choque variable. No es necesario presentar aquí los datos detallados de este experi- mento (Sidman y Boren, 1957b). El principal hallazgo fue que los animales aprendían y mantenían con éxito su conducta de evitación con intervalos respuesta-choque variables. Los animales que habían formado una discriminación temporal du- rante el procedimiento de operante libre inicial mantuvieron la discri-
- 16. 5 4 3 2 o 564 CAP. 10 CONDUCTA DE EVITACIÓN EVITACIÓN DE OPERANTE LIBRE CONCURRENTE • 161 minación, incluso con intervalos respuesta-choqqe variables. Anger (1963) señaló que, aunque los choques se programan con igual frecuencia des- pués de las pausas cortas y largas en el procedimiento variable, hay necesariamente más pausas cortas. El número de choques por oportuni- dad, en consecuencia, es menor poco después de que el animal responde, y aumenta conforme el animal pasa más tiempo sin presionar la palanca. La discriminación temporal puede ser un reflejo de esta probabilidad del choque que aumenta gradualmente conforme pasa el tiempo sin que haya una respuesta. También puede considerarse al procedimiento variable como un pro- cedimiento en el cual el programa de choques es intermitente en cada intervalo respuesta-choque. El animal recibe un choque cada vez que hace una pausa de una duración igual al intervalo respuesta-choque más largo; pero los choques se presentan después de las pausas más breves solamente cuando se están programando intervalos respuesta-choque más cortos. El siguiente procedimiento es un método más simple y explícito para programar choques intermitentes. CHOQUES INTERMITENTES Este procedimiento es una variante del de evitación de operante libre, en el cual el animal no recibe una cierta proporción de choque que debe administrársele cuando deja de presionar la palanca dentro del intervalo choque-choque o respuesta-choque. Primero se condicionó a- los animales a presionar la palanca y evitar el choque en el procedimiento de operante libre básico, can intervalos choque-choque y respuesta-choque iguales a 20 segundos. Luego se im- plantó el procedimiento de choques intermitentes. En el procedimiento con el 100% de choques, los animales recibían un choque cada vez que transcurrían 20 segundos sin que presionaran la palanca. En los procedimientos de choque intermitente, los animales recibieron el choque solamente en un porcentaje predeterminado de las ocasiones en que esperaron 20 segundos sin responder. Por ejemplo, en el procedimiento del 50% de choques, había que administrar un choque cada vez que el animal esperaba 20 segundos sin presionar la palanca, pero realmente sólo se administraba el 50% de los choques debidos. Se usaron los porcentajes de choques 100, 50, 30, 20, 10, 5 y 2.5. Los principales resultados de este procedimiento aparecen en la fi- gura 21 (Boren y Sidman, 1957b). Estos datos demuestran que puede omitirse por lo menos el 70% de los choques administrados normalmente cuando los animales dejan de responder, sin que disminuyan aprecia- blemente las tasas de respuestas de los animales. 100 90 80 70 60 50 40 30 20 10 PORCENTAJE DE CHOQUES "ASIGNADOS" ADMINISTRADOS EN REALIDAD FIGURA 21. Tasa de la emisión de respuestas de evitación de cada uno de cinco animales como función del porcentaje de choques administrados. (Tomado de Boren y 51dman, 1957b.) Como se indicó anteriormente, el procedimiento de intervalo respuesta- choque variable y el procedimiento intermitente están muy relacionados. Siempre que no se administra un choque debido, el animal tiene la oportunidad de experimentar un intervalo respuesta-choque considerable- mente mayor de 20 segundos. Cada choque no administrado aumenta el intervalo potencial otros 20 segundos; sin embargo, un análisis de los tiempos entre respuestas de los animales indicó que rara 'vez hacían pausas lo suficientemente largas para experimentar los intervalos respuesta-choque largos, hasta que el porcentaje de choques disminuía por debajo del 30%. La demostración de que podemos mantener la conducta de evitación de los animales, incluso economizando un número considerable de choques, nos indica que debemos examinar el papel re- presentado por los choques. Pero antes de hacerlo en detalle, examinemos dos procedimientos un poco más complejos. EVITACIÓN DE OPERANTE LIBRE CONCURRENTE En este procedimiento la rata puede presionar una de dos palancas. Dos contadores de reciclaje independientes programan los choques; cada contador administra un choque cada 20 segundos, pero como los conta- dores son ligeramente variables, están fuera de fase entre sí y la rata o
- 17. RATA CO-41 SESION 1 PALANCA B (RCH 20 SEG) 't'llg"."1.1".°215.11‘ggs"21 PALANCA A (RCH 20 SEG) 566 CAP. 10 CONDUCTA DE EVITACIÓN EVITACIÓN DE OPERANTE LIBRE CONCURRENTE 567 recibe choques a intervalos regulares. Si el animal no presiona ninguna de las palancas, la tasa promedio de choques es de uno cada diez segundos. Los choques que administran los dos contadores son idénticos. Si la rata presiona la palanca A, reajusta el contador A en el prin- cipio de su ciclo de canteo y pospone el choque que, de otro modo, le habría administrado el contador A. Asimismo, presionando la palanca B, el animal puede reajustar el contador B y posponer su choque. Las contingencias de cada palanca son independientes. Si el animal presio- nara solamente la palanca A, pospondría los choques que tenía que administrarle el contador A, pero el contador B no se vería afectado y continuaría administrando un choque cada 20 segundos al animal. Igual- mente, si el animal presionara solamente la palanca B, el contador A continuaría administrando un choque cada 20 segundos. El animal sólo puede evitar todos los choques alternando con frecuencia suficiente entre las dos palancas. UNA HORA FIGURA 22. Registros acumulativos de las respuestas emitidas por un animal en cada palanca durante su primera sesión del procedimiento de operante libre concurrente. En ambas curvas están registrados todos los choques, independientemente del contador que los administró. (Tomado de Sidman, 1962d.) En este experimento, cada contador programa individualmente un intervalo choque-choque de 20 segundos. El intervalo respuesta-choque que controla cada palanca y su cantador asociado es también de 20 segundos. Presionando cualquiera de las dos palancas, el animal asegura que uno de los contadores no administre un choque antes de que hayan transcurrido 20 segundos; sin embargo, durante ese periodo de 20 se- gundos el otro contador puede administrar un choque si el animal no ha presionado la otra palanca. Adquisición Varios animales no alternaron entre las dos palancas y se limitaron a emitir sus respuestas casi exclusivamente en una. Esto resultó ser un desarrollo instructivo, y la figura 22 ilustra un ejemplo. La rata CO-41 rara vez presionó la palanca A y recibió un choque del contador A casi cada 20 segundos. A pesar de los frecuentes choques, presionó la pa- lanca B más de 500 veces durante la primera sesión. ¿Cuáles fueron las consecuencias observables de la conducta de la rata CO-41? Si el animal no presionaba ninguna de las palancas recibía un choque cada diez segundos, en promedio; si presionaba una de las palancas con frecuencia suficiente, podía reducir la tasa de choques a uno cada 20 segundos. La rata CO-41 mostró tendencia a este último tipo de ajuste a la situación. Aunque su solución no fue la mejor, tuvo éxito e hizo disminuir el número total de choques que recibía. Intervalos choque-choque y respuesta-choque La figura 23A muestra un registro de un animal que, después de varias sesiones, se dedicó casi exclusivamente a presionar la palanca B. Presionó la palanca A solamente 66 veces en seis horas y presionó la palanca B más de 11 000 veces, es decir, a una tasa de aproximadamente 30 respuestas por minuto. La ejecución de la rata CL-8 fue bastante notable. Incluso con un choque cada 20 segundos, la tasa de presión de la palanca por parte del animal no sólo fue relativamente estable, sino ha sido una de las más altas que hemos visto en conjunto con procedimientos de evitación de operante libre con ratas. Presionando la palanca B a una tasa tan elevada, el animal se aseguraba de recibir un choque poco después de responder. En esta situación debe haber estado operando un reforzamiento poderoso, a fin de mantener al animal pre- sionando continuamente frente a castigos tan frecuentes. Después de la sesión 21, los intervalos choque-choque y respuesta- choque programados en el contador B aumentaron de 20 a 40 segundos. El contador A siguió administrando un choque siempre que el animal dejaba de presionar la palanca A dentro de 20 segundos, pero el con- tador B administraba su choque solamente cuando el animal no respon- día en la palanca B durante 40 segundos. Durante la sesión 23, la rata CL-8 cambió radicalmente su conducta (figura 23B). Disminuyó su tasa de respuestas en la palanca B, pero aunque el intervalo respuesta-choque de esta palanca no había sido al- terado, el animal presionó la palanca A con más frecuencia de lo que lo había hecho anteriormente. Un examen minucioso de la figura 24 puede ayudar a esclarecer los resultados de este experimento. Con los intervalos de los dos conta- dores puestos en 20 segundos, la línea a de la figura 24 muestra que la tasa de choques (choques por segundo) es de 100 si el animal nunca presiona ninguna palanca. Si el animal presiona la palanca B con fre- 200 R ESPU ESTAS
- 18. UNA HORA RATA CL-8 EVITACION PALANCA A RCH 20 SEG 6 1 — 5 t k 4 3 ,•~" 1 . 17 fflQ1 " 1.‘ '"1"1 / : 0~1 200 RESPUESTAS Ii o I me I 1 CONCURRENTE SESION 23 5 6 4 n‘«011~111"1114 1. ‘ "I ' 511 : 1 3 vsles°11.1131 :0 1 4 . 00000 0 1,11: 0 1 1 2 _ 1_ _ de 4"1 jd ' FI* .1 PALANCA B RCH 40 SEG Ás a? f• 568 CAP. 10 CONDUCTA DE EVITACIÓN UNA HORA EVITACIÓN DE OPERANTE LIBRE CONCURRENTE 569 SEGUNDOS W W Cf) Ci) NN II H < 02 O O w w ci) o o N‘rt 1111 < 02 a — — c 10 20 30 40 50 60 70 80 90 1111111111 1 11 HIIHIII HI III 1111111111/111 1 B A .11 '100 A 05G A A 1 A B e '075 A .050 B 025 A A FIGURA 23 (A y B). Ejecución de un animal en el procedimiento de operante libre con- currente antes (sesión 21) y después (sesión 23) de un cambio en el intervalo respuesta- choque de la palanca B. (Tomado de Sidman, 1962d.) cuencia suficiente (línea b), cortará a la mitad la tasa de choques, para producir 0.050; esta ejecución es análoga a la de la rata CL-8, que se ve en la figura 23A. Si mantenemos el intervalo de 20 segundos en el contador A y aumentamos el contador B a 40 segundos, la tasa de choques llega a 0.075 si el animal no responde nunca (línea c) . Si el animal continúa presionando exclusivamente la palanca B (línea d), mantiene la misma FIGURA 24. Representación esquemática de los efectos que producen diversos patrones de respuestas sobre la densidad de los choques. Las flechas hacia arriba indican los cho- ques administrados por los contadores A y B. Las flechas hacia abajo indican las respues- tas emitidas en la palanca A o en la B. Los números que están a la derecha de cada línea revelan la densidad promedio de los choques (choques por segundo) por cada tipo de patrón de respuestas. Los números que se hallan fuera de los paréntesis en la parte izquierda indican los intervalos respuesta-choque que hay en las palancas A y B. tasa de choques que tenía antes, 0.050. Pero mientras que esta ejecu- ción redujo originalmente la tasa base en un 50% de 0.100 a 0.050, la misma conducta reduce ahora la densidad del choque solamente en un tercio, ,de 0.075 a 0.050. El animal puede lograr una reducción de dos tercios (de 0.075 a 0.025) si cambia a la otra palanca su prefe- rencia (línea e) . La rata CL-8 tendió a hacer este tipo de ajuste cam- biando las condiciones: disminuyó su tasa de respuestas en la palanca B y aumentó su preferencia por la palanca A; esto constituyó el método más efectivo para disminuir la frecuencia de los choques, después de que el intervalo respuesta-choque de la palanca B se había cambiado a 40 segundos. En otro trabajo (Sidman, 1962c) pueden encontrarse resultados adi- cionales de este procedimiento concurrente, pero el análisis aquí presen- tado indica que hay varios métodos más idóneos para obtener una imagen más completa. Por ejemplo, podríamos mantener los dos conta- dores (cada uno con su propio intervalo choque-choque), pero obligar a la rata a presionar sólo una palanca. Al presionar la palanca, el animal podría reajustar uno de los contadores y posponer su choque; pero el otro contador seguiría pasando el ciclo ininterrumpidamente y estable- cería la menor tasa de choques que pudiera alcanzar el animal. Una serie de intervalos choque-choque diferentes en el contador fijo, correlacio- nada con diversos intervalos respuesta-choque en el otro, mostraría cuan- titativamente cómo se combinan la tasa base de choques y el nivel hasta
- 19. 11 10 9 7 6 5 4 3 2 o o PALANCA C o o 10 20 30 40 50 PALANCA V 90 150 210 -o RATA 7 571 570 CAP. 10 CONDUCTA DE EVITACIÓN el cual el animal puede reducir la tasa base para influir en la emisión de respuestas de evitación del animal. Hemos visto que los animales que solamente disponen de una pa- lanca, la presionan más rápidamente cuando disminuimos el intervalo respuesta-choque. Podríamos interpretar esto en el sentido de que los resultados del procedimiento concurrente sólo indican que el animal res- ponde más rápidamente en la palanca asociada con el intervalo respuesta- choque más corto. El experimento que se describirá a continuación demuestra que los animales también pueden comportarse de manera opuesta. Los animales escogen la palanca asociada con el intervalo respuesta-choque más largo, si ese es el método más eficiente para reducir la frecuencia de los choques. EVITACIÓN DE OPERANTE LIBRE MEZCLADA Como sucede en el procedimiento concurrente, el animal dispone de dos palancas. El choque puede ser programado por cualquiera de los tres contadores, y estos contadores no son independientes entre sí. Siem- pre que el animal recibe un choque, empieza a funcionar el contador choque-choque y continúa administrando un choque cada diez segundos, mientras el animal deje de presionar cualquiera de las palancas. Cuando el animal presiona una de las palancas, deja de funcionar el contador choque-choque y empieza a funcionar el contador C o V, dependiendo de cuál palanca se presiona. En cualquier momento dado hay solamente uno de los tres contadores funcionando: el contador choque-choque, si el animal no ha presionado una palanca desde que recibió el último choque; el contador C, si el animal presionó la palanca C la última vez; o el contador V, si el animal presionó la palanca V la última vez. El contador C tiene un ajuste constante de 20 segundos; cada vez que la rata presiona la paladea C, reajusta de nuevo el contador C en el principio de su ciclo, pero si entonces el animal deja transcurrir 20 segundos sin presionar ninguna de las palancas, el contador C admi- nistra un choque y empieza a funcionar el contador choque-choque. El ajuste del contador V varía y sus intervalos respuesta-choque varían de 5 a 150 segundos en diferentes fases del experimento. Cada vez que la rata presiona la palanca V, reajusta de nuevo el contador V al principio de su ciclo; pero si deja transcurrir el ciclo sin presionar ninguna de las palancas, el contador V administra un choque al animal y empieza a funcionar el contador choque-choque. El contador choque-choque determina la tasa de choques base; mien- tras el animal no presione ninguna palanca, recibirá un choque cada diez segundos. Puede reducir la tasa de choques presionando cualquiera EVITACIÓN DE OPERANTE LIBRE MEZCLADA INTERVALO RESPUESTA—CHOQUE EN LA PALANCA V FIGURA 25. Tasas de las respuestas que emite un animal en las dos barras (barra V y barra C) como función del intervalo respuesta-choque asociado con la barra V. El Inter- valo respuesta-choque de la barra C fue siempre de 20 segundos. (Según Sidman, 1954a.) de las palancas, pero puede lograr una mayor reducción presionando la palanca asociada con el intervalo respuesta-choque más largo. En esto difiere del procedimiento concurrente, en el que la palanca asociada con el intervalo más corto era más eficiente. La figura 25 ilustra los datos sobre un animal obtenidos en este experimento (Sidman, 1954a). Los intervalos respuesta-choque que se encuentran en la abscisa se refieren solamente a la palanca V, pues el intervalo asociado con la palanca C fue siempre de 20 segundos. La flecha muestra el lugar donde el intervalo fue el mismo en ambas palan- cas. Vemos que el animal responde más frecuentemente en la palanca que tiene el intervalo respuesta-choque más largo. Por tanto, no es inevi- table, que el intervalo respuesta-choque más corto genere la tasa de presión de la palanca más alta; para que esto suceda, también debe permitir una mayor reducción de la tasa de choques. Sin embargo, no es fácil especificar cómo hacen contacto con el animal los cambios de la tasa de choques. Por ejemplo, ¿vamos a con- siderar al animal como una computadora, capaz de integrar los choques en el tiempo y de calcular su densidad? Aunque esto parezca improbable, especialmente cuando hay intervalos largos entre los choques, no se puede descartar la posibilidad. Para evaluarlo adecuadamente, se tendría que inventar un método que permitiera al animal reaccionar ante la densi- dad del choque per se, sin indicios ambientales más directos. RE S PUESTAS POR MINUT O
- 20. 573 572 CAP. 10 CONDUCTA DE EVITACIÓN Las situaciones algo idealizadas que se presentan en la figura 24 sugieren una segunda posibilidad. Para simplificar el análisis, la figura 24 presentada se diseñó como si los contadores no variaran, de tal manera que los choques de la línea a se producen regularmente cada diez segundos. Al presionar la palanca B, el animal interrumpe esta serie estable, pro- duciendo en ella "orificios" (línea b). Una sola interrupción de este tipo es el cambio más pequeño que puede presentarse en la tasa base. ¿Puede la omisión de uno o más choques de una secuencia regular como ésta ser una fuente de reforzamiento para el animal? Por lo contrario, ¿puede la inserción de uno o más choques extra en la serie ser una vía a través de la cual el animal reacciona ante el aumento de las tasas de choque? Anger (1957) ha presentado pruebas de que las ratas pueden usar como estímulo discriminativo la omisión de un evento en una serie re- gular; sin embargo, aún tenemos que determinar el curso temporal y los límites cuantitativos de este proceso. El problema es aún más complejo cuando la serie de eventos es irregular. Por ejemplo, en la línea c de la figura 24 el patrón de base de los choques varía, aunque de una manera predecible. Si hacemos la secuencia temporal aún menos predecible, re- sultaría más difícil para el animal reaccionar ante la omisión de un choque. Una vez más, todavía no se han encontrado estos límites (véase a Dinsmoor, 1962). La discriminación temporal es una tercera vía por medio de la cual los cambios de la tasa de choques pueden hacer con- tacto con el animal. Anger (1963) ha argumentado, en cierta medida, que un gradiente temporal condicionado de aversividad permite al animal discriminar los periodos "seguros" (la baja tasa de choques que se pre- senta inmediatamente después de que presiona la palanca) de los perio- dos "peligrosos" (las elevadas tasas de choques que se presentan en los intervalos más largos después de la respuesta). Pero también puede invertirse el argumento; los cambios de la tasa de choques refuerzan al animal por la discriminación temporal. La tasa de choques y la discri- minación temporal son variables dependientes. ¿Se puede determinar cuál de las dos actúa, primeramente? Una cuarta conexión posible entre la frecuencia del choque y la conducta de evitación del animal surgirá de los experimentos siguientes. Ya se hizo notar, en el estudio del aprendizaje de evitación inicial, que el control conductual puede transferirse de una serie de choques a un solo choque. Si esto sucede verdaderamente, tal vez la baja frecuencia de choques que recibe el animal bien entrenado no sea un obstáculo para el poder explicativo de la tasa de choques. EXTINCIÓN Los animales aprenden a evitar los choques solamente si ya han recibido alguno. Una vez que aplicamos un choque al animal, creamos un potencial para el reforzamiento. Si permitimos que el animal pre- sione una palanca y de esta manera posponga o evite un choque que de otra manera habría recibido, observamos que la presión de la palanca se convierte en una característica prominente de la conducta del animal. •Mientras más frecuentemente apliquemos choques al animal por dejar de presionar la palanca, con más frecuencia la presionará. Una vez que el animal ha aprendido a evitar el choque, podemos hacer que la con- ducta regrese a su nivel bajo original desconectando el choque. Even- tualmente, el animal dejará de presionar la palanca; la conducta se ha extinguido. Entonces, los choques son necesarios si el animal ha de aprender su conducta de evitación y si ha de mantenerla. Esta función "motiva- dora" del choque es tal vez su característica más evidente, y probable- mente es la causante, por lo menos en parte, de los efectos de variables tales como la densidad de choques (Sidman, 1962d) y la intensidad del choque (Boren, Sidman y Herrnstein, 1959). Pero el choque tiene tam- bién otras funciones; por ejemplo, ya hemos visto que puede constituir un punto de referencia en el tiempo y permitir de esta manera que el animal desarrolle una discriminación temporal eficiente (véase la fi- gura 13A). El choque puede asumir también otro tipo de control discriminativo sobre la conducta del animal. Puede convertirse en un aspecto impor- tante de la situación experimental total, semejante a la iluminación o a los aspectos espaciales y geográficos del espacio experimental. Hablando de cierta manera, los choques, como las paredes de la cámara experi- mental, le "dicen" al animal que se encuentra en una situación de evi- tación. Cuando el animal ha estado evitando con éxito durante un tiem- po, y no ha recibido ningún choque, la situación ha cambiado, en efecto. La evitación satisfactoria crea una situación semejante a una en la que la evitación no es necesaria. Por tanto, eventualmente el animal dejará de presionar la palanca al tiempo suficiente para recibir otro choque. Es posible que la función discriminativa del choque sea responsable del hecho de que puede ser necesario sólo un choque para restablecer la conducta de evitación del animal. Si condicionamos a un animal a presionar la palanca y evitar los choques, después extinguimos la respuesta •de presionar la palanca des- conectando el choque, luego recondicionamos la respuesta de presionar la palanca, la extinguimos otra vez y continuamos exponiendo al animal
- 21. 574 CAP. 10 CONDUCTA DE EVITACIÓN ADAPTACIÓN DE LA DISCRIMINACIÓN TEMPORAL Hay por lo menos dos formas en que el animal puede haber empleado el choque para discriminar los periodos de extinción. Una posibilidad es que el animal usara los intervalos temporales existentes entre los cho- ques. En el lapso de un intervalo que estuviera fuera de la gama de tiempos entre choques a los cuales el animal se hubiera acostumbrado durante sus periodos de evitación, el animal podría hacer más lenta o detener su actividad de presionar la palanca. Un experimento en el que se introdujeron deliberadamente tales periodos durante una sesión de evitación, indica que hay otros factores fundamentales (Sidman, 1955a). La segunda posibilidad implica un tipo de discriminación más local basada en intervalos respuesta-choque, más que en tiempos entre cho- ques. El animal puede aprender que una vez que va más allá del inter- valo respuesta-choque sin recibir un choque, no vuelve a recibir ninguno durante esa sesión. Ya hemos visto que los animales pueden discriminar precisamente el intervalo respuesta-choque (véase la figura 11). El si- guiente experimento indica que los animales también pueden aprender a adaptarse con rapidez cuando se cambia el intervalo respuesta-choque. R ESPU ESTAS 575 1 HORA TIEMPO ADAPTACIÓN DE LA DISCRIMINACIÓN TEMPORAL FIGURA 26. Registros acumulativos de la ejecución de un animal durante las sesiones 1 y 18 de la extinción y el condicionamiento de evitación libre alternados. Las flechas muestran el momento en que se desconectó el choque; después de este punto, las "rayas" que aparecen en las curvas se anotaron siempre que los animales permanecían 20 segun- dos sin presionar la palanca. (Tomado de Boren y Sidman, 1957a.) a periodos alternados de condicionamiento y de extinción, podemos po- ner la operación de extinción más explícitamente bajo el control de los choques. Se llevó a cabo un experimento en el que primero se entrenó a las ratas a presionar una palanca con un procedimiento de evitación de operante libre. Luego se dividió en dos partes cada sesión experi- mental consecutiva. En la primera parte de cada sesión se conectaba el choque, y el animal tenía que presionar la palanca a fin de evitar el choque. En la segunda parte de cada sesión experimental se desconec- taba el choque. En la figura 26 puede verse una muestra de los datos de este expe- rimento (Boren y Sidman, 1957a). En la primera sesión, el primer periodo de extinción de la rata M-14, hubo poca evidencia de extinción. Sin embargo, hacia la sesión decimoctava de condicionamiento y extin- ción alternados, la tasa de presión de la palanca del animal descendió a un nivel bajo, poco después de desconectar el choque. El animal había aprendido a discriminar que ya no recibiría choques. La rata G-4 había tenido una experiencia extensiva con el procedi- mient9 de operante libre con intervalos choque-choque y respuesta- choque de 20 y 40 segundos. Las curvas de rayas con círculos blancos de las figuras 27A y 27B indican la presencia de excelentes discriminaciones temporales basadas en estos dos intervalos. La figura 27A muestra lo que ocurrió con la discriminación temporal cuando el intervalo respuesta- choque se cambió de 20 a 40 segundos, mientras el intervalo cho- que-choque se seguía manteniendo en 20 segundos. La figura 27B muestra lo que sucedió cuando el intervalo respuesta-choque se cambió en la otra dirección (de 40 segundos a 20 segundos), mientras el intervalo choque- choque se mantenía en 40 segundos. En ambos casos, el animal ajustó a los nuevos intervalos su discriminación temporal, y el ajuste fue casi completo en la primera hora. Como el intervalo choque-choque se man- tenía constante, el animal tenía que responder y experimentar el inter- valo respuesta-choque, para tener una base con qué ajustar su conducta. Estos datos, especialmente los de la figura 27A, en la que el animal recibió solamente ocho choques en la primera hora del nuevo intervalo, indican que el animal es capaz de hacer un ajuste rápido y preciso ante la ocurrencia o no ocurrencia del choque en un momento dado después de emitir una respuesta. No es irrazonable suponer que un me- canismo de esta naturaleza es responsable de la discriminación bien des-
- 22. 100 RATA G-4 SESION 84. CH-CH = R-CH = 20 SEG •••••••SESION 85. PRIMERA HORA. CH-CH =20; R-CH = 40 SEG o—o SESION 85. SEXTA HORA. CH-CH =20; R-CH = 40 SEG .60- 9 1 40- 1 / / .001 4 tr-107 -~1""41:•<*""******** •, I I 6 10 14 18 22 26 TIEMPO TRANSCURRIDO DESDE LA RESPUESTA PRECEDENTE (SEGUNDOS) 30 I4 38 PROBABI LIDA D D E LA RESPU ESTA 80- • co--o SESION 92. CH-CH = R-CH =40 SEG RAT G-4 o•••-• SESION 93. PRIMERA HORA. CH-CH =40; R-CH = 20 SEG a--o SESION 93. SEXTA HORA. CH-CH =40; R-CH = 20 SEG •••••••••••••••••••• -0 -O— 576 CAP. 10 CONDUCTA DE EVITACIÓN .00 2 6 10 14 18 22 26 30 34 38 TIEMPO TRANSCURRIDO DESDE LA RESPUESTA PRECEDENTE (SEGUNDOS) FIGURA 27 (A y B). DiscriMinacién temporal de un animal antes y después de cambiar el intervalo respuesta-choque. La probabilidad de la respuesta se calculé en forma de tiempos entre respuestas por oportunidad. arrollada que hace el animal del procedimiento de extinción que se demostró anteriormente. Si esta discriminación, o la discriminación basada en los tiempos entre choques, o ambas, son causantes de la velocidad con que se extin- gue la conducta de evitación del animal, a pesar de todo podemos pre- guntarnos si habrá un fenómeno de extinción adicional. Como notamos anteriormente (véase la figura 4), conforme el animal aprende la res- puesta de evitación, se presentan periodos sin choque cada vez más lar- CHOQUE LIBRE 577 gos. Un mono bien entrenado puede presionar la palanca a una tasa elevada durante cientos de horas sin recibir un solo choque. Si, como se explicó anteriormente, la evitación satisfactoria genera las condiciones de su propia extinción, ¿qué es lo que causa la persistencia progresiva- mente creciente del animal? Hemos considerado el papel que desempeña el choque como evento discriminativo que el animal puede usar, como indicio para seguir pre- sionando la palanca o para dejar de hacerlo. Es posible considerar de una manera semejante la propia conducta de presión de la palanca del animal. Al igual que el choque y los estímulos ambientales, la propia actividad de presionar la palanca del animal le informa que se encuentra en una situación de evitación. Conforme la propia conducta del animal desarrolla esta función discriminativa, sus respuestas llegan a generarse a sí mismas. Siempre que el animal presiona la palanca, restablece una parte del complejo de estímulos que denota que esta situación requiere una conducta de evitación, y ésta genera a su vez respuestas adicionales. N CHOQUE LIBRE En un experimento con el procedimiento de choque intermitente, en el que el animal fue programado para recibir solamente cada quinto choque de los asignados, notamos, en cierta ocasión, que la rata empezó a presionar la palanca más rápidamente de lo normal. Al revisar el aparato descubrimos que un componente había fallado y que el animal era incapaz de posponer cada quinto choque, independientemente de que presionara o no la palanca. Llamó nuestra atención la implicación de que la tasa de emisión de respuestas de evitación podía aumentarse administrando choques ocasionales al animal, a pesar de su conducta de evitación. Entonces llevamos a cabo una serie de experimentos para ver qué sucedería cuando deliberadamente aplicáramos al animal cho- ques inevitables ocasionales (choques libres). Nuestra observación origi- nal fue confirmada posteriormente. Cuando administrábamos choques libres a un animal que estaba evitando el choque o que había aprendido a evitarlo, el animal siempre aumentaba su tasa de presión de la palanca. (Véase también a Kelleher, Riddle y Cook, 1963; Waller y Waller, 1963.) En un experimento en el que se utilizaron monos como sujetos, se entrenó a los animales a evitar los choques con intervalos choque-choque y respuesta-choque de 20 segundos, en el procedimiento de operante li- bre. Luego se les administró a los animales un choque libre cada diez minutos. En los cinco minutos que precedían inmediatamente a cada choque libre, se encendió un ruido de clic. De este modo, el animal mos- traba periodos alternados de silencio y de ruido de clic, y el choque
- 23. A Mono M 21 a Ch Cl Ch CI MONO M-25 578 CAP. 10 CONDUCTA DE EVITACIÓN 15 MINUTOS FIGURA 28. Aumento que se produce en la tasa de respuestas (del registro A al registro B) cuando se le administraron choques libres al animal. El signo "Cl" marca el principio del ruido de clic; el signo "Ch" marca el choque y el final del ruido de clic. La curva se desplaza ligeramente hacia abajo cuando el ruido de clic está encendido. (Tomado de Sidman, Herrnstein y Conrad, 1957.) libre siempre se producía al final del ruido de clic. Por tanto, pudimos comparar la conducta de evitación del animal en una situación sin choque libre (durante los periodos silenciosos) con su conducta en una situación en la que recibía choques libres (los periodos con ruido de clic). La figura 28 muestra que el choque libre produjo aproximada- mente un aumento al triple de la tasa de presiones del animal a la palanca, tanto en presencia como en ausencia del ruido de clic. El efecto del choque libre no era permanente. La tasa de presiones del animal a la palanca empezó a disminuir, primero en los periodos silenciosos y luego en los de ruido de clic. Como la disminución de la tasa de respuestas de presión de la palanca siguió un curso temporal • diferente en presencia y en ausencia del estímulo, hubo un periodo de varias horas durante las cuales el animal presionó la palanca con más rapidez durante el estímulo que en su ausencia. Si cambiamos ligera- mente el procedimiento, podemos acentuar esta diferencia. Eliminamos el choque que se producía generalmente cuando el animal dejaba de CHOQUE LIBRE 579 15 MINUTOS FIGURA 29. Curva de respuesta aumulativa que ilustra la extinción casi completa que se produce entre los estímulos y la aceleración positiva durante la acción de los estímulos. El registro de dos horas se dividió en segmentos de una hora; el 1 indica la primera presentación del clic en la primera hora y el 7 indica el primer clic de la segunda hora. (Tomado de Sidman, Hermstein y Conrad, 1957.) presionar la palanca e hicimos, así, que la conducta de evitación se ma- nifestara según un procedimiento de extinción; pero continuamos admi- nistrando el choque libre al final de cada periodo de ruido de clic de cinco minutos. Eventualmente, el animal dejó de presionar la palanca casi completamente en los periodos silenciosos. Continuó emitiendo su tasa de respuestas baja durante la primera parte del ruido de clic, pero conforme se acercaba el momento de recibir el choque libre, el animal presionaba la Palanca más rápidamente. La figura 29 muestra un ejem- plo de una sesión de dos horas, en la que el mono presionó rápidamente la palanca durante el sonido y rara vez la presionó en otros momentos. El choque libre por sí solo fue suficiente para mantener una tasa de respuestas elevada. Aunque el animal continuó emitiendo este patrón de conducta durante muchas horas, dejó eventualmente de presionar la palanca por completo, tanto en presencia como en ausencia del estímulo. Aplicar al animal choques libres ocasionales es otra manera de pro- gramar un intervalo respuesta-choque variable. A veces, el animal pre- siona la palanca y recibe un choque antes de que transcurra el intervalo respuesta-choque acostumbrado. Si los choques libres no se administran con frecuencia, es posible que el animal no aprenda que, de hecho, es inevitable. Como el intervalo entre las respuestas de presión de la palanca y los choques inevitables subsiguientes generalmente es más corto que el 2 0 0 R ESPU E STA S 200 RESPU ESTAS
- 24. RCH 30 SEG CHL 2.5 Mrl>0 RCH 30 SEG CHL 2.5 MI N 580 CAP. 10 CONDUCTA DE EVITACIÓN 5 10 15 20 25 SESIONES CONSECUTIVAS FIGURA 30. Depresión de las tasas de respuestas que producen los choques libres (CHL). Los intervalos choque-choque y respuesta-choque fueron de 30 segundos en todas las se- siones. De izquierda a derecha, los segmentos representan las condiciones siguientes; veinte sesiones consecutivas con choque libre cada 2.5 minutos; dos sesiones sin choque libre, una sesión con choque libre cada 2.5 minutos, dos sesiones sin choque libre, dos sesiones con choque libre cada 2.5 minutos, y cuatro sesiones con choque libre cada 5 minutos. intervalo respuesta-choque programado, el aumento de la tasa de presión del animal a la palanca puede ser una reacción ante los intervalos que parecen más cortos. Hay algunos datos incompletos que indican que el efecto de los choques libres desaparece más pronto mientras se admi- nistran al animal más a menudo. Mientras más frecuentes son los cho- ques, más rápidamente puede discriminar el animal que se trata de choques inevitables. En algunos experimentos en los que se utilizaron ratas como sujetos, he observado que el efecto facilitador de los choques libres no solamente dura menos tiempo que en los monos, sino que, eventualmente, los cho- ques libres llegan a hacer disminuir la tasa de respuestas de evitación del animal. La figura 30 muestra claramente este efecto. La primera parte de esta figura muestra la tasa de respuestas del animal cuando se CONTROL DE ESTÍMULOS 581 administró un choque libre cada dos minutos y medio; cuando se eliminó el choque libre, la tasa de presiones de la palanca del animal aumentó aproximadamente al triple. Cuando se restableció el choque libre, volvió a disminuir la tasa de presiones del animal a la palanca, aumentó otra vez cuando se suprimió el choque libre, disminuyó de nuevo cuando se restableció el choque libre cada 2.5 min, y luego aumentó ligeramente cuando los choques libres se administraron con una frecuencia media. El efecto que tiene el choque libre de mantener al animal presionando la palanca incluso después de que ya no es posible evitar el choque, puede atribuirse a la función que tiene el choque libre de crear un intervalo respuesta-choque / espur_ki. También puede atribuirse al papel de estímulo discriminativo qu'éjeSempeña el choque. Hasta que el animal aprende que los choques son realmente inevitables, los choques siguen funcionando como estímulos que le "dicen" al animal que se encuentra en una situa- ción de evitación. Mientras el choque continúa teniendo una de estas funciones, o ambas, el animal continúa presionando la palanca como si todavía fuera posible la evitación. Cuando el animal aprende que los choques son de hecho inevitables, éstos asumen la función contraria; entonces le indican al animal que está en una situación en la que la evitación es imposible. Una vez que el choque ha adquirido este tipo de función discriminativa, puede ser extremadamente difícil, si no im- posible, recondicionar la respuesta de evitación del animal (Sidman, Mason, Brady y Thach, 1962). En la siguiente sección se analizará una tercera función que tiene el • choque, que se ha definido con menos exactitud. CONTROL DE ESTÍMULOS No ahondaremos mucho en los problemas especiales que surgen cuan- do aplicamos explícitamente estímulos exteroceptivos en la situación de evitación. Quizá la afirmación más general que podamos hacer sea que cualquiera de los procedimientos que se han descrito puede ponerse bajo control de estímulos. Por ejemplo, podemos programar el procedimiento de evitación de operante libre siempre que esté encendido un ruido de clic; siempre que el ruido esté apagado, el animal no recibe choques y no tiene que presionar la palanca. El animal aprende eventualmente a presionar la palanca solamente cuando está encendido el ruido de clic. Como un animal bien entrenado rara vez hace pausas mayores que el intervalo respuesta-choque, y por tanto recibe pocos choques, puede ser difícil enseñarle que la evitación es innecesaria cuando el estímulo está apagado. El proceso de aprendizaje puede acelerarse de dos maneras. Si iniciamos el entrenamiento de discriminación al empezar el condicio- 30
- 25. 582 CAP. 10 CONDUCTA DE EVITACIÓN namiento, antes de que el animal haya aprendido a evitar eficientemente, no habrá muchas oportunidades para que aprenda que los choques no se producen cuando hace pausas mayores que el intervalo respuesta- choque en ausencia del estímulo. Además, si dejamos apagado el estímulo durante largos periodos, dándole así a la conducta de evitación la opor- tunidad de extinguirse, el animal tendrá más oportunidades para apren- der que los choques se producen solamente si hace pausas largas mien- tras el estímulo está encendido, y no cuando éste se encuentra apagado. En un procedimiento de discriminación en el que se utilizó a un mono como sujeto, el choque se apagó y el mono no tenía que presionar la palanca cuando los clics se producían a una tasa de seis por segundo; cuando los clics se producían a una tasa de dos por segundo, estaban en acción los intervalos choque-choque y respuesta-choque de 20 segun- dos. Durante las primeras nueve sesiones, los dos estímulos alternaron cada 15 minutos. En las últimas sesiones, las duraciones del estímulo se redujeron gradualmente a un minuto. En la primera sesión, el animal presionó la palanca con frecuencia casi igual en presencia de ambos estímulos, pero en las sesiones sucesivas presionó la palanca con mayor frecuencia ante el estímulo positivo (2/seg) y disminuyó su tasa de res- puestas ante el estímulo negativo (6/seg). Eventualmente, el animal llegó a mantener una tasa de presiones de palanca efectiva ante el estímulo positivo y sólo presionó rara vez ante el estímulo negativo. La figura 31 muestra partes selectas de registros acumulativos en los que la duración del estímulo disminuyó de nueve minutos a tres. Todos 'los choques que recibió el animal en estas sesiones se ilustran en dicha figura. Los registros se seleccionaron para mostrar un efecto común que tienen las choques. En casi todos los casos el animal aumentó su tasa de presión de la palanca inmediatamente antes de recibir un choque. Son de interés especial aquellos casos en que el animal siguió respon- diendo rápidamente hasta el punto en que se encendió el estímulo nega- tivo. Si el mono aumentó su tasa de respuestas después del choque simplemente porque el choque restableció la contingencia de evitación, esperaríamos que el estímulo negativo no tuviera ningún efecto sobre la tasa en la que el animal reasumió la presión de la palanca la próxima vez que reapareció el estímulo positivo. Sin embargo, notamos que cuan- do el estímulo positivo se encendió otra vez, el animal no reasumió la tasa elevada de presiones de la palanca que había interrumpido el es- tímulo negativo. El efecto del choque parece haberse disipado cuando el estímulo negativo estaba encendido y el animal no estaba presionando la palanca. Esto indica que el choque tiene otro efecto, además de esta- blecer y mantener la contingencia de evitación o de su función como evento discriminativo. No se ha proseguido esta observación. GENERALIZACIÓN DE ESTíMULOS 583 10 MINUTOS FIGURA 31. Cada segmento del registro acumulativo muestra tres presentaciones del es- tímulo positivo y dos del estímulo negativo. Las curvas se desplazaron ligeramente hacia abajo cuando el estímulo negativo estaba encendido. Las duraciones del estimulo ea Indi- can a la derecha de cada segmento. Las flechas indican los choques, y éstos as han numerado en orden consecutivo dentro de cada sesión. GENERALIZACIÓN DE ESTÍMULOS. En el experimento descrito anteriormente, el mono presionó al prin- cipio la palanca con igual frecuencia cuando los clics se producían con una tasa de dos o seis por segundo. Esto indica que la conducta de 150 RES PU ESTAS