
Abstract
Developing appropriate analytic-function-based constitutive models for new materials with nonlinear mechanical behavior is demanding. For such kinds of materials, it is more challenging to realize the integrated design from the collection of the material experiment under the classical topology optimization framework based on constitutive models. The present work proposes a mechanistic-based data-driven topology optimization (DDTO) framework for three-dimensional continuum structures under finite deformation. In the DDTO framework, with the help of neural networks and explicit topology optimization method, the optimal design of the three-dimensional continuum structures under finite deformation is implemented only using the uniaxial and equi-biaxial experimental data. Numerical examples illustrate the effectiveness of the data-driven topology optimization approach, which paves the way for the optimal design of continuum structures composed of novel materials without available constitutive relations.






















Similar content being viewed by others


Notes
While in the 3D case, more DOFs related to low-density element need to be eliminated to solve the convergence issue caused by excessive deformation of low-density elements. Thanks to the decoupling of the geometry model and analysis model in the MMV method, we won’t need to worry about the reintroduction of removed DOFs or elements in subsequent iteration (Xue et al. 2019; Zhang et al. 2017; Du et al. 2022).
References
Allaire G, Jouve F, Toader AM (2004) Structural optimization using sensitivity analysis and a level-set method. J Comput Phys 194:363–393
Bendsøe MP (1989) Optimal shape design as a material distribution problem. Struct Optim 1:193–202
Bendsøe MP, Kikuchi N (1988) Generating optimal topologies in structural design using a homogenization method. Comput Methods Appl Mech Eng 71:197–224
Bonatti C, Mohr D (2022) On the importance of self-consistency in recurrent neural network models representing elasto-plastic solids. J Mech Phys Solids 158:104697
Buhl T, Pedersen CBW, Sigmund O (2000) Stiffness design of geometrically nonlinear structures using topology optimization. Struct Multidisc Optim 19:93–104
Chen F, Wang Y, Wang MY, Zhang YF (2017) Topology optimization of hyperelastic structures using a level set method. J Comput Phys 351:437–454
Chen J, Yang H, Elkhodary KI, Tang S, Guo X (2022) G-MAP123: a mechanistic-based data-driven approach for 3D nonlinear elastic modeling—via both uniaxial and equibiaxial tension experimental data. Extreme Mech Lett 50:101545
Dalklint A, Wallin M, Tortorelli DA (2020) Eigenfrequency constrained topology optimization of finite strain hyperelastic structures. Struct Multidisc Optim 61:2577–2594
Deng H, Cheng L, To AC (2019) Distortion energy-based topology optimization design of hyperelastic materials. Struct Multidisc Optim 59:1895–1913
Du Z, Cui T, Liu C, Zhang W, Guo Y, Guo X (2022) An efficient and easy-to-extend Matlab code of the Moving Morphable Component (MMC) method for three-dimensional topology optimization. Struct Multidisc Optim 65:158
Guo X, Zhang WS, Zhong WL (2014) Doing topology optimization explicitly and geometrically—a new moving morphable momponents based framework. J Appl Mech 81:081009
Guo X, Du Z, Liu C, Tang S (2021) A new uncertainty analysis-based framework for data-driven computational mechanics. J Appl Mech 88:111003
Ha SH, Cho S (2008) Level set based topological shape optimization of geometrically nonlinear structures using unstructured mesh. Comput Struct 86:1447–1455
He Q, Chen JS (2020) A physics-constrained data-driven approach based on locally convex reconstruction for noisy database. Comput Methods Appl Mech Eng 363:112791
Huang J, Xu S, Ma Y, Liu J (2022) A topology optimization method for hyperelastic porous structures subject to large deformation. Int J Mech Mater Des 18:289–308
Ibañez R, Borzacchiello D, Aguado JV, Abisset-Chavanne E, Cueto E, Ladeveze P, Chinesta F (2017) Data-driven non-linear elasticity: constitutive manifold construction and problem discretization. Comput Mech 60:813–826
Ibañez R, Abisset-Chavanne E, Aguado JV, Gonzalez D, Cueto E, Chinesta F (2018) A manifold learning approach to data-driven computational elasticity and inelasticity. Arch Computat Methods Eng 25:47–57
Kanno Y (2018) Simple heuristic for data-driven computational elasticity with material data involving noise and outliers: a local robust regression approach. Jpn J Ind Appl Math 35:1085–1101
Kirchdoerfer T, Ortiz M (2016) Data-driven computational mechanics. Comput Methods Appl Mech Eng 304:81–101
Lahuerta RD, Simões ET, Campello EM, Pimenta PM, Silva EC (2013) Towards the stabilization of the low density elements in topology optimization with large deformation. Comput Mech 52:779–797
Luo Y, Wang MY, Kang Z (2015) Topology optimization of geometrically nonlinear structures based on an additive hyperelasticity technique. Comput Methods Appl Mech Eng 286:422–441
Masi F, Stefanou I, Vannucci P, Maffi-Berthier V (2021) Thermodynamics-based artificial neural networks for constitutive modeling. J Mech Phys Solids 147:104277
Silva ALF, Salas RA, Silva ECN, Reddy JN (2020) Topology optimization of fibers orientation in hyperelastic composite material. Comput Struct 231:111488
Svanberg K (1987) The method of moving asymptotes—a new method for structural optimization. Int J Numer Methods Eng 24:359–373
Tang S, Zhang G, Yang H, Li Y, Liu WK, Guo X (2019) MAP 123: A data-driven approach to use 1D data for 3D nonlinear elastic materials modeling. Comput Methods Appl Mech Eng 357:112587
Tang S, Li Y, Qiu H, Yang H, Saha S, Mojumder S, Liu WK, Guo X (2020) MAP123-EP: a mechanistic-based data-driven approach for numerical elastoplastic analysis. Comput Methods Appl Mech Eng 364:112955
Tang S, Yang H, Qiu H, Fleming M, Liu WK, Guo X (2021) MAP123-EPF: a mechanistic-based data-driven approach for numerical elastoplastic modeling at finite strain. Comput Methods Appl Mech Eng 373:113484
van Dijk NP, Langelaar M, van Keulen F (2014) Element deformation scaling for robust geometrically nonlinear analyses in topology optimization. Struct Multidisc Optim 50:537–560
Wang MY, Wang XM, Guo DM (2003) A level set method for structural topology optimization. Comput Methods Appl Mech Eng 192:227–246
Wang F, Lazarov BS, Sigmund O, Jensen JS (2014) Interpolation scheme for fictitious domain techniques and topology optimization of finite strain elastic problems. Comput Methods Appl Mech Engrg 276:453–472
Xia Q, Shi T (2016) Stiffness optimization of geometrically nonlinear structures and the level set based solution. Int J Simul Multisci Des Optim 7:A3
Xie YM, Steven GP (1993) A simple evolutionary procedure for structural optimization. Comput Struct 49:885–896
Xue R, Liu C, Zhang W, Zhu Y, Tang S, Du Z, Guo X (2019) Explicit structural topology optimization under finite deformation via Moving Morphable Void (MMV) approach. Comput Methods Appl Mech Eng 344:798–818
Yoon GH, Kim YY (2005) Element connectivity parameterization for topology optimization of geometrically nonlinear structures. Int J Solids Struct 42:1983–2009
Yoon GH, Kim YY (2007) Topology optimization of material-nonlinear continuum structures by the element connectivity parameterization. Int J Numer Methods Engrg 69:2196–2218
Zhang XS, Chi H (2020) Efficient multi-material continuum topology optimization considering hyperelasticity: achieving local feature control through regional constraints. Mech Res Commun 105:103494
Zhang W, Chen J, Zhu X, Zhou J, Xue D, Lei X, Guo X (2017) Explicit three dimensional topology optimization via Moving Morphable Void (MMV) approach. Comput Methods Appl Mech Engrg 322:590–614
Zhang Z, Zhao Y, Du B, Yao W (2020a) Topology optimization of hyperelastic structures using a modified evolutionary topology optimization method. Struct Multidisc Optim 62:3071–3088
Zhang XS, Chi H, Paulino GH (2020b) Adaptive multi-material topology optimization with hyperelastic materials under large deformations: a virtual element approach. Comput Methods Appl Mech Eng 370:112976
Zhou M, Rozvany GIN (1991) The COC algorithm, Part II: topological, geometrical and generalized shape optimization. Comput Methods Appl Mech Eng 89(1–3):309–336
Zhou Y, Zhan H, Zhang W, Zhu J, Bai J, Wang Q, Gu Y (2020) A new data-driven topology optimization framework for structural optimization. Comput Struct 239:106310
Acknowledgements
The financial supports from the National Natural Science Foundation (11821202, 11732004, 12002073, 11872139), the National Key Research and Development Plan (2020YFB1709401), Dalian Talent Innovation Program (2020RQ099), and 111 Project (B14013) are gratefully acknowledged.
Funding
Funding was provided by National Natural Science Foundation of China (Grant Numbers 11821202, 11732004, 12002073, 11872139), National Key Research and Development Plan (Grant Number 2020YFB1709401), Dalian Talent Innovation Program (Grant Number 2020RQ099), and 111 Project (B14013).
Author information
Authors and Affiliations
Contributions
Shan Tang (shantang@dlut.edu.cn) and Xu Guo (guoxu@dlut.edu.cn) are co-corresponding authors of this paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare they have no conflict of interest.
Replication of results
Code and data for replication can be provided up on request.
Additional information
Responsible Editor: Shikui Chen
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
where \({N}_{k,p}\left(u\right)\),\({N}_{l,q}\left(v\right)\) are the B-spline basis functions of \(p\) th and \(q\) th orders, \(K=14\) and \(L=6\) are the total number of control points in the \(\theta\) and \(\varphi\) directions, respectively. The symbols \({{\varvec{P}}}^{k,l}={\left({P}_{x}^{k,l},{P}_{y}^{k,l},{P}_{z}^{k,l}\right)}^{\top },\boldsymbol{ }k=0,\dots ,K, l=0,\dots ,L\) are the coordinates of the corresponding control points. In order to avoid self-intersection of the surfaces, the control points are constructed as follows:
where \({r}^{k,l},\boldsymbol{ }k=0,\dots ,K, l=0,\dots ,L\) is the distance from the control point to the center of the void, \({\theta }_{k}=\frac{2k\pi }{K}, k=0,\dots ,K, {\varphi }_{l}=\frac{l\pi }{L}, l=0,\dots ,L\). Since the surface is a closed region, it is also required that
Appendix B
In Eq. (2.11), the derivative of \({\chi }^{i}\left({{\varvec{D}}}^{i};{\varvec{x}}\right)\) with respect to each design variable can be calculated as follows:
where
If \(n=k\) and \(m=l\), \(\partial {P}_{x}^{k,l}/\partial {r}^{k,l}\), \(\partial {P}_{y}^{k,l}/\partial {r}^{k,l}\), \(\partial {P}_{z}^{k,l}/\partial {r}^{k,l}\) are be expressed as
otherwise, \(\partial {P}_{x}^{n,m}/\partial {r}^{k,l}=0\), \(\partial {P}_{y}^{n,m}/\partial {r}^{k,l}=0\), \(\partial {P}_{z}^{n,m}/\partial {r}^{k,l}=0\).
Appendix C
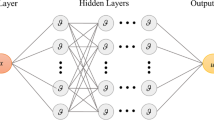
As shown in the above two tables, the ANN performs better on both ideal and noisy data sets, and ANN is adopted as the fitting tool in this work.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Guo, Y., Du, Z., Wang, L. et al. Data-driven topology optimization (DDTO) for three-dimensional continuum structures. Struct Multidisc Optim 66, 104 (2023). https://doi.org/10.1007/s00158-023-03552-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00158-023-03552-6