


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
The NRF24 is a very cheap and easy to use, and has much potential for long distance 2 way communication between 2 devices (ideal for drone). But it is very difficult to find a way to exploit the potential benefits.
IMPORTANT: These NRF24 modules really need a 100uF capacitor across the Vin, without this you will have all kind of issues.
The code provided has my joystick inputs that you can get rid of and put your own, but it is a good way to test and ensure that live data is being transmitted between the two microcontrollers.
Good luck!!
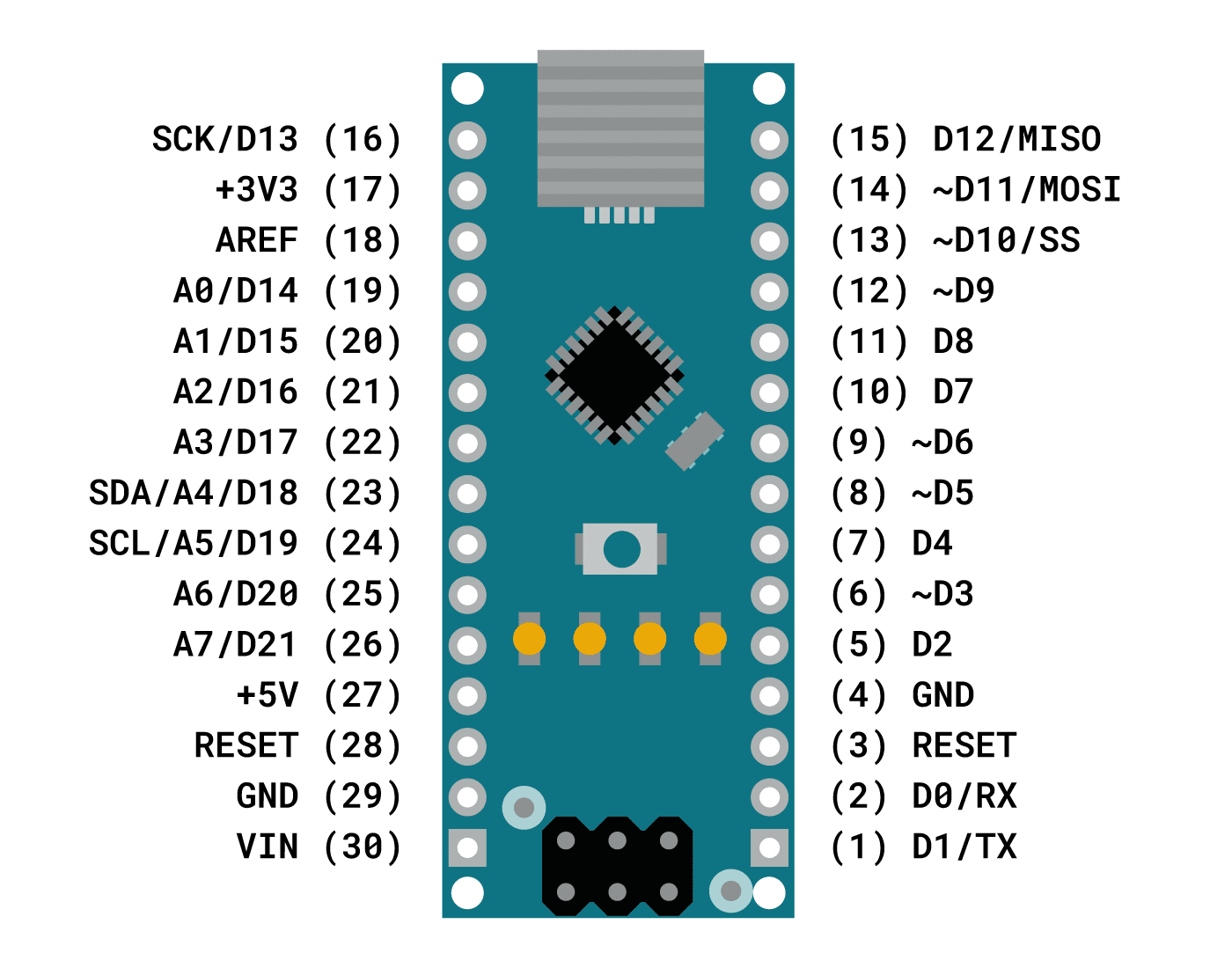
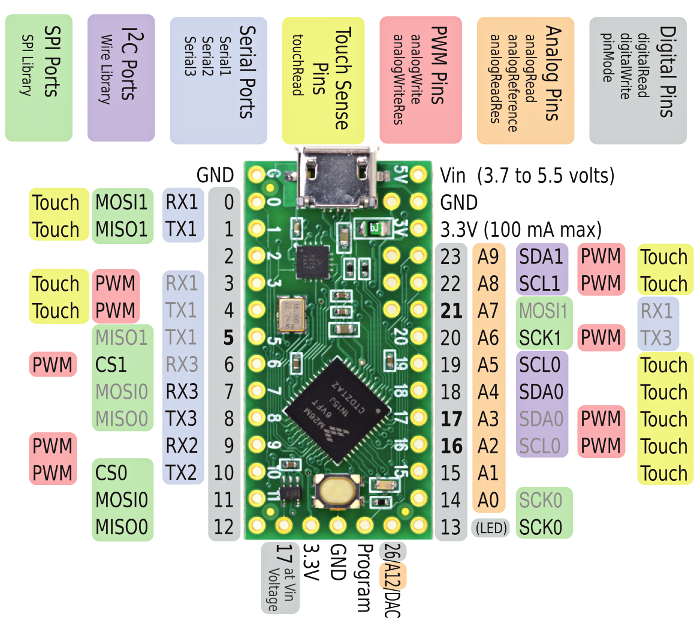
Arduino Pinout
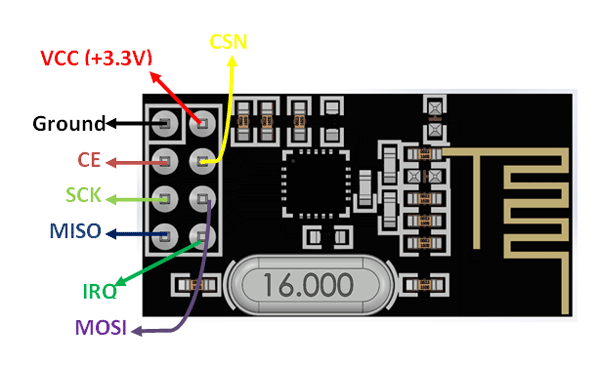
Use this to connect the necessary pins to the NRF24, notice how there are no CE or CSN pin, these are specified in the code.
#include <SPI.h>
#include <nRF24L01.h>
#include "RF24.h"
#define CE_PIN 9 //4 for nano
#define CSN_PIN 10 //2 for nano
//Radio variables declaration
const byte slaveAddress[5] = {'R', 'x', 'A', 'A', 'A'};
RF24 radio(CE_PIN, CSN_PIN); // Create a Radio
struct Package
{
int8_t thrust = 0;
int8_t x = 0;
int8_t y = 0;
int8_t z = 0;
};
struct Sent_1
{
int8_t gyro_x = 0;
int8_t gyro_y = 0;
int8_t gyro_z = 0;
int8_t Front_Left;
int8_t Front_Right;
int8_t Rear_Left;
int8_t Rear_Right;
};
Package package;
Sent_1 sent_1;
bool newData = false;
long unsigned int current_time = 0;
const int signal_confimation_rate = 1000; //how often to send a radio confimation signal
long unsigned int signal_confimation_time = 1000; //counts how often this signal is sent
//Joystick variables declaration
//Input pins
const int XL_pin = 0; // analog pin connected to XL output
const int YL_pin = 1; // analog pin connected to YL output
const int XR_pin = 2; // analog pin connected to XR output
const int YR_pin = 3; // analog pin connected to YR output
//Pot values
float xr, yr;
float xl, yl;
float thrustRate;
//Raw pot values
float xr_raw, yr_raw;
float xl_raw, yl_raw;
//Smoothing Vars
const int numReadings = 20;
int readIndex = 0; // the index of the current reading
float readings_xr[numReadings]; // the readings from the analog input
float total_xr = 0; // the running total
float average_xr = 0; // the average
float readings_yr[numReadings]; // the readings from the analog input
float total_yr = 0; // the running total
float average_yr = 0; // the average
float readings_xl[numReadings]; // the readings from the analog input
float total_xl = 0; // the running total
float average_xl = 0; // the average
//Controller Values
int xr_mid;
int yr_mid;
int xl_mid;
int yl_mid;
//Controller angle setting
int max_tilt = 10;
int min_tilt = 1;
//Values for linearly mapping pot values to X,Y target angles
void setup()
{
Serial.begin(115200);
delay(500);
Serial.println("Serial \t OK");
radio.begin();
radio.setDataRate( RF24_250KBPS );
radio.enableAckPayload();
radio.setRetries(5, 5); // delay, count
// 5 gives a 1500 µsec delay which is needed for a 32 byte ackPayload
radio.openWritingPipe(slaveAddress);
Serial.println("Radio \t OK");
delay(500);
xr_mid = analogRead(XR_pin);
yr_mid = analogRead(YR_pin);
xl_mid = analogRead(XL_pin);
yl_mid = analogRead(YL_pin);
}
void loop() {
//Reading Joystick
processingJoyStick();
//Packing data
package.y = -average_yr;
package.x = -average_xr;
package.z = -average_xl;
//Thrust rate is a stationary value
thrustRate = yl;
package.thrust = package.thrust + thrustRate;
if (package.thrust >= 1800) {
package.thrust = 1800;
}
if (package.thrust <= 1000) {
package.thrust = 1000;
}
send();
printPackage();
}
void processingJoyStick()
{
xr_raw = analogRead(XR_pin);
yr_raw = analogRead(YR_pin);
xl_raw = analogRead(XL_pin);
yl_raw = analogRead(YL_pin);
if (xr_raw > (xr_mid + 50)) {
xr = (0.02 * xr_raw) - 10;
}
if (xr_raw < (xr_mid - 50)) {
xr = (0.02 * xr_raw) - 10;
}
if (xr_raw > 471 && xr_raw < 569) {
xr = 0;
}
if (yr_raw > 570) {
yr = (0.02 * yr_raw) - 10;
}
if (yr_raw < 470) {
yr = (0.02 * yr_raw) - 10;
}
if (yr_raw > 471 && yr_raw < 569) {
yr = 0;
}
if (xl_raw > 570) {
xl = (0.02 * xl_raw) - 10;
}
if (xl_raw < 470) {
xl = (0.02 * xl_raw) - 10;
}
if (xl_raw > 471 && xl_raw < 569) {
xl = 0;
}
if (yl_raw > 570) {
yl = (-0.02 * yl_raw) + 10;
}
if (yl_raw < 400) {
yl = (-0.02 * yl_raw) + 10;
}
if (yl_raw > 401 && yl_raw < 569) {
yl = 0;
}
//Control values must be smoothed or they cause the PDI control system to spaz out when it receives a 10 straight away
//Smoothing XR values
total_xr = total_xr - readings_xr[readIndex];
// read from the sensor:
readings_xr[readIndex] = xr;
// add the reading to the total:
total_xr = total_xr + readings_xr[readIndex];
//Smoothing YR values
total_yr = total_yr - readings_yr[readIndex];
// read from the sensor:
readings_yr[readIndex] = yr;
// add the reading to the total:
total_yr = total_yr + readings_yr[readIndex];
//Smoothing XL values
total_xl = total_xl - readings_xl[readIndex];
// read from the sensor:
readings_xl[readIndex] = xl;
// add the reading to the total:
total_xl = total_xl + readings_xl[readIndex];
// advance to the next position in the array:
readIndex = readIndex + 1;
// if we're at the end of the array...
if (readIndex >= numReadings) {
// ...wrap around to the beginning:
readIndex = 0;
}
// calculate the xr average:
average_xr = total_xr / numReadings;
// calculate the yr average:
average_yr = total_yr / numReadings;
// calculate the xl average:
average_xl = total_xl / numReadings;
}
void printPackage()
{
Serial.print(sent_1.gyro_x);
Serial.print("\t");
Serial.print(sent_1.gyro_y);
Serial.print("\t");
Serial.print(sent_1.gyro_z);
Serial.print("\t");
Serial.print(package.x);
Serial.print("\t");
Serial.print(package.y);
Serial.print("\t");
Serial.print(package.z);
Serial.println(" ");
}
void send() {
bool rslt;
rslt = radio.write( &package, sizeof(package) );
// Always use sizeof() as it gives the size as the number of bytes.
// For example if dataToSend was an int sizeof() would correctly return 2
if (rslt) {
if ( radio.isAckPayloadAvailable() ) {
radio.read(&sent_1, sizeof(sent_1));
newData = true;
}
else {
Serial.println(" Acknowledge but no data ");
}
}
else {
Serial.println(" Tx failed");
}
}
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#define CE_PIN 4
#define CSN_PIN 2
RF24 myRadio(4, 2); const byte thisSlaveAddress[5] = {'R', 'x', 'A', 'A', 'A'};
RF24 radio(CE_PIN, CSN_PIN);
char dataReceived[10]; // this must match dataToSend in the TX
struct Package
{
uint8_t thrust = 1000;
uint8_t x = 1;
uint8_t y = 2;
uint8_t z = 3;
};
Package package;
struct Sent_1
{
uint8_t gyro_x = 4;
uint8_t gyro_y = 5;
uint8_t gyro_z = 6;
uint8_t Front_Left;
uint8_t Front_Right;
uint8_t Rear_Left;
uint8_t Rear_Right;
};
Sent_1 sent_1;
bool newData = false;
void setup() {
Serial.begin(115200);
delay(1000);
Serial.println("SimpleRxAckPayload Starting");
radio.begin();
radio.setDataRate( RF24_250KBPS );
radio.openReadingPipe(1, thisSlaveAddress);
radio.enableAckPayload();
radio.startListening();
radio.writeAckPayload(1, &sent_1, sizeof(sent_1)); // pre-load data
}
void loop() {
packageReply();
getData();
showData();
}
void packageReply() {
sent_1.gyro_x = 4;
sent_1.gyro_y = 5;
sent_1.gyro_z = 6;
Serial.print(package.x);
Serial.print(" ");
Serial.print(package.y);
Serial.print(" ");
Serial.println(package.z);
}
void getData() {
if ( radio.available() ) {
radio.read( &package, sizeof(package) );
updateReplyData();
newData = true;
}
}
//================
void showData() {
if (newData == true) {
Serial.print("Data received ");
Serial.println(dataReceived);
Serial.print(" ackPayload sent ");
Serial.print(package.x);
Serial.print(", ");
Serial.println(sent_1.gyro_x);
newData = false;
}
}
//================
void updateReplyData() {
radio.writeAckPayload(1, &sent_1, sizeof(sent_1)); // load the payload for the next time
}




{kind=link}
{kind=link}
{kind=link}
Comments