
Soft Wearable Robots: Development Status and Technical Challenges

State Key Laboratory of Robotics and System, Harbin Institute of Technology (HIT), Harbin 150001, China
*
Author to whom correspondence should be addressed.
Sensors 2022, 22(19), 7584; https://doi.org/10.3390/s22197584
Submission received: 30 August 2022
/
Revised: 25 September 2022
/
Accepted: 3 October 2022
/
Published: 6 October 2022
(This article belongs to the Special Issue Challenges and Future Trends of Wearable Robotics)
Abstract
:In recent years, more and more research has begun to focus on the flexible and lightweight design of wearable robots. During this process, many novel concepts and achievements have been continuously made and shown to the public, while new problems have emerged at the same time, which need to be solved. In this paper, we give an overview of the development status of soft wearable robots for human movement assistance. On the basis of a clear definition, we perform a system classification according to the target assisted joint and attempt to describe the overall prototype design level in related fields. Additionally, it is necessary to sort out the latest research progress of key technologies such as structure, actuation, control and evaluation, thereby analyzing the design ideas and basic characteristics of them. Finally, we discuss the possible application fields, and propose the main challenges of this valuable research direction.
1. Introduction
As many task scenarios have high requirements on physical capability, human beings desire to break through physiological limits by utilizing an external mechanical device so that they can realize goals such as less fatigue, fast movement or great strength [1]. For groups with impaired motor ability, it is also hoped that a similar system can achieve the effect of rehabilitation training [2]. Driven by the practical demands above, research on related technologies of wearable robots have begun to flourish, which facilitates the formation of relatively systematic theoretical knowledge. These robots belong to electromechanical integration systems closely cooperating with the wearers. They analyze the human intention through multi-source sensors, solve the motion commands with control strategies designed according to specific requirements, adjust different forms of actuators to generate suitable power, and finally complete actions in collaboration with human joints.
In this article, the connotation of wearable robot is consistent with that of exoskeleton defined in ASTM F48 [3], which “augments, enables, assists, and/or enhances physical activity through mechanical interaction with the body”, and “may include rigid or soft components, or both”. Rigid systems take advantage of link mechanisms parallel to the limbs to achieve load transmission and joint assistance [4]. Their basic characteristics bring about many intractable problems. First of all, the overall volume often seems pretty large, causing inconvenience of operation and carrying. Additionally, human joints possess a relatively complex anatomical structure, whose rotation center is constantly changing within the range of motion. This phenomenon makes it difficult for exoskeletons that simulate human joints with rotating pairs to reproduce the natural trajectory of limb movement. The misalignment between the joints of an exoskeleton and wearer seriously weakens the man–machine coordination. Furthermore, the exoskeleton tends to possess large mass and inertia, due to the extensive usage of rigid structures. On the one hand, it inevitably adds impedance to the whole system, while on the other hand, it also introduces additional load that needs to be borne, resulting in reduced wearing comfort and increased metabolic cost.
Under the restrictions of the disadvantages above, many researchers are turning to the field of soft wearable systems, trying to achieve a lightweight and flexible scheme with the help of a soft medium for power transmission. The soft systems, usually described as exosuits or soft exoskeletons, do not rely on the linkage mechanisms to assist joint movements, and have no rigid frame to support the load [5]. Simulating the working principle of muscles and tendons, they apply flexible driving units installed on the body surface to transmit power to corresponding joints. The exosuits avoid many defects of rigid exoskeletons from the design principle, and show greater performance in terms of comfort, convenience and coordination [6].
In recent years, many cutting-edge technologies and various new prototypes have emerged with research on exosuits taking an upward trend [7,8]. Numerous review literature collates and compares the technological achievements in this field from different emphases. For example, some scholars focus on soft wearable robots for lower limbs based on a cable-driven scheme and divide them into three categories for discussion [9]. Some papers systematically describe soft and rigid systems that assist certain local joints and comprehensively analyze the technical characteristics of both [10]. There are also some studies that introduce exosuits according to the target assisted joints [11].
In this paper, we aim to comprehensively review the current development status of soft wearable robots for various human joints, summarize the key technologies supporting the entire system, and discuss the existing challenges that hinder their further development. In Section 2, according to the different parts that need assistance, all soft wearable systems could be divided into three categories, namely upper extremity exosuits targeting shoulder, elbow and wrist, lower extremity exosuits aiming at the hip, knee and ankle, and back-assist exosuits for lumbar support. In Section 3, from the four aspects including structure, drive, control and evaluation, we review the design concepts and technical solutions which have been put forward by relevant scholars to realize power assistance with soft wearable robots. In Section 4, this paper discusses the main application scenarios of this technology in the future and analyzes the problems that need to be solved.
In general, this review will report the current progress and typical results and provide a basic reference and a systematic introduction to those who want to investigate exosuit research.
2. Overview of Exosuit
There are significant differences in the anatomical structures and movement patterns for each joint. Different assistance schemes should be carefully evaluated according to specific application requirements. This section will be described using aspects of upper extremity exosuits, lower extremity exosuits and back-assist exosuits.
2.1. Upper Extremity Exosuits
The upper extremity system simulates the working principle of muscles and tendons to generate power at the shoulder, elbow or wrist, which assists the upper arm, forearm or hand to perform specific movements or pick up loads. Several representative exosuits are shown in Figure 1.
2.1.1. Shoulder
The shoulder connects the trunk and upper arm, which consists of the humerus, clavicle and scapula to form its basic skeleton. It belongs to a compound joint, including scapulothoracic, acromioclavicular, glenohumeral and sternoclavicular. This complex structure enables the shoulder to have excellent movement flexibility in space and can support a variety of action modes such as flexion, extension, adduction, abduction, internal rotation, external rotation and circumduction. Table 1 lists key features of some exosuits for shoulder assistance.
Much literature focused on the assistance of one action mode of the shoulder to verify the effect and feasibility of their schemes. To help people with cerebral palsy perform repetitive task practice, Natividad et al. [12] designed a lightweight and unrestrictive exosuit for shoulder abduction. An inflatable beam acted as the driving unit, whose position control was realized by regulating internal pressure. Thompson et al. [13] described the basic design philosophy of a cable-driven exosuit with soft pneumatic actuators for augmenting shoulder flexion. They took advantage of fiber-reinforced elastomeric enclosures to create two actuation architectures including the nested linear form and pennate form, and then compared their output characteristics. The driving force was transmitted to the corresponding joint via a Bowden cable. O’Neill et al. [14] developed an abduction-assisted system that placed a textile-based pneumatic actuator under the armpit. The main purpose was to study how structural parameters of the actuator affected its moment characteristics.
Figure 1.
Exosuits for upper limbs: (a) Unpowered shoulder exosuit for supporting weight and relieving muscle fatigue [15]; (b,c) Wearable devices based on Bowden cables for elbow assistance [16,17]; (d) Pneumatic exosuit for load holding and carrying [18]; (e) Cable-driven device for wrist flexion [19]; (f) Wearable robot using shape memory alloy [20]; (g) An exosuit with a combination of different textiles through force-compliant sewing [21]; (h) A cable-driven prototype to assist shoulder flexion/extension, shoulder adduction/abduction, and elbow flexion/extension [22].
Figure 1.
Exosuits for upper limbs: (a) Unpowered shoulder exosuit for supporting weight and relieving muscle fatigue [15]; (b,c) Wearable devices based on Bowden cables for elbow assistance [16,17]; (d) Pneumatic exosuit for load holding and carrying [18]; (e) Cable-driven device for wrist flexion [19]; (f) Wearable robot using shape memory alloy [20]; (g) An exosuit with a combination of different textiles through force-compliant sewing [21]; (h) A cable-driven prototype to assist shoulder flexion/extension, shoulder adduction/abduction, and elbow flexion/extension [22].

Some research achieved simultaneous assistance for multiplanar movements of the shoulder through relatively sophisticated design. O’Neill et al. [23] utilized two types of soft pneumatic actuators to provide power for abduction and horizontal flexion/extension. The main parts were nearly invisible when folded and not in use and can also be put on and taken off as easily as ordinary clothes. By comparing biological muscle activity before and after powering on the system, it was proved that this wearable robot can make a positive contribution to shoulder movement in daily life. Park et al. [15] proposed an unpowered wearable device for flexion/extension and adduction/abduction, which can provide gravity compensation in any posture. The passive actuator applied assistive torques to the joint through flexible tendons. Evaluation experiments based on electromyography (EMG) measurement proved that muscle fatigue can be effectively relieved when performing repetitive limb movements. Varghese et al. [24] put forward a novel perception strategy for a shoulder exosuit with multiple degrees of freedom (DoFs). The research aimed at establishing a tendon-routing architecture inspired by muscle synergies and using multivariate multiple regression to estimate joint angle based on sensor data.

{kind=link}
{kind=link}
{kind=link}
Table 1.
Several representative exosuits for shoulder assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| Natividad et al. [12] | 2016 | Abduction | Pneumatic actuator | Three-axis accelerometer, pressure sensor | Position control | Healthcare |
| Park et al. [15] | 2017 | Flexion/extension, adduction/abduction | Passive actuator | - | - | Physical enhancement |
| O’Neill et al. [23] | 2017 | Abduction, horizontal flexion/extension | Pneumatic actuator | 6-axis load cell, encoder, pressure sensor | Open loop control | Healthcare |
| Thompson et al. [13] | 2019 | Flexion | Pneumatic actuator with Bowden cable | Load cell, pressure gauge | Proportional-integral-differential (PID) controller | Physical enhancement |
| Varghese et al. [24] | 2020 | Multi-DoF movements | Cable-driven module | Tendon-based sensing units | Feedback control | Healthcare |
| O’Neill et al. [14] | 2021 | Abduction | Pneumatic actuator | External pressure sensor, torque sensor | Pressure control | Physical enhancement |
2.1.2. Elbow
The basic configuration of the elbow contains the ulna and radius in the forearm and the humerus in the upper arm. The biceps, triceps, brachioradialis and other muscle groups work together to control the corresponding joint movement. It is often regarded as a rotational pair, with one DoF in flexion/extension. Table 2 introduces some research related to elbow exosuits.
In terms of elbow assistance, Masia’s team conducted relatively comprehensive studies on soft wearable robots driven by Bowden cables [16,25]. In [26], an easily scalable embedded architecture was mentioned, which could be used for power management, low-level motor control, high-level signal processing and data streaming. To make the cable-driven module compact and improve its transmission efficiency, a scheme of driving two Bowden cables through a single motor was adopted, which can provide additional torque for joint flexion and extension in an agonist–antagonist manner [27]. Later, they even invented a more complex actuation mechanism, trying to drive multiple DoFs through only one prime mover, so that it can realize the assistance for elbow joints of both arms [28]. The exosuit equipped with this module utilized a novel PID-modulated pulse width modulation (PWM) controller to precisely regulate the velocity for each DoF independently [29].
Pneumatic wearable robots also looked suitable for providing elbow assistance. Thalman et al. [30] used an array of air chambers encased in nylon fabric to build an exosuit for repetitive lifting tasks. A mathematical model for bending behavior and torque calculation was developed. Nassour et al. [18] adopted a similar structural principle to design a powered elbow exosuit. Their experiments on 12 individuals demonstrated that this exosuit can significantly reduce muscle activity, metabolic consumption and fatigue, which meant that it was appropriate for many tasks including lifting, holding and carrying. In addition, Ang et al. [31] proposed a wearable system for assisting elbow flexion based on a bellow-type soft pneumatic actuator. A model was built to estimate the maximum tip force of this 3D printed actuator, which could provide a reference for adjusting its parameters to match different payloads. Through shape deposition manufacturing methods, Gao et al. [32] built a soft pneumatic elbow exosuit with silicone rubber, and implanted three sensors (barometric pressure sensor, bending sensor and force sensor) into the system. The relationship between barometric pressure and bending value was obtained through several experiments, and it was also shown that the root mean square of the EMG signal can be reduced by using this system.
In contrast, there was very little research on how to apply twisted string actuators to an elbow exosuit. Hosseini et al. [33] made attempts to demonstrate the possibility of this application. With two twisted string actuators generating power independently, the proposed wearable device can assist movements for single- or dual-arm mode under load conditions. A controller based on surface electromyograph (sEMG) took charge of activating and regulating the system output to save human efforts.
Table 2.
Several representative exosuits for elbow assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| Dinh et al. [34] | 2017 | Flexion/extension | Cable-driven module | Flex sensor, two load cells | Hierarchical control | Physical enhancement |
| Gao et al. [32] | 2017 | Flexion | Pneumatic actuator | Pressure, bending and force sensors | - | Healthcare |
| Chiaradia et al. [26] | 2018 | Flexion/extension | Cable-driven module | Stretch sensor, load cell | Gravity compensation control | Physical enhancement |
| Thalman et al. [30] | 2018 | Flexion | Pneumatic actuator | Pressure sensor | Open-loop control | Physical enhancement |
| Lotti et al. [35] | 2020 | Flexion | Cable-driven module | Load cell, encoder, EMG electrode | Model-based myoelectric control | Physical enhancement |
| Ang et al. [31] | 2020 | Flexion | Pneumatic actuator | - | - | Physical enhancement |
| Hosseini et al. [33] | 2020 | Flexion | Twisted string actuator | Force sensor, encoder, sEMG sensor | sEMG-based control | Physical enhancement |
| Nassour et al. [18] | 2021 | Flexion | Pneumatic actuator | Pressure sensor | Switch operated by a person | Physical enhancement |
2.1.3. Wrist
The wrist connects the human hand to the forearm, and belongs to the compound joint composed of the articulationes carpometacarpeae, articulatio mediocarpalis, articulus radiocarpicus and articulationes radioulnaris distalis. It can complete many actions such as flexion, extension, abduction and adduction, which are assisted by muscles including the flexor carpi radialis, extensor carpi ulnaris, extensor carpi radialis, and flexor carpi ulnar. Table 3 details a few studies on wrist exosuits.
Some research has focused on how to construct a wrist exosuit with different DoFs by combining many pneumatic artificial muscles. The prototypes in [36,37] both adopted an arrangement with two actuators located at the upper and lower parts of a sleeve. The former applied air bags to keep the wrist in a neutral position for a typing application, while the latter used fold-based actuation mechanism to complete motions in two DoFs. A wearable robot named EXOWRIST [38,39] tried to help perform wrist rehabilitation training with four pneumatic actuators symmetrically arranged around the forearm. It achieved independent movement assistance for extension, flexion, ulnar deviation and radial deviation by inflating two designated actuators and deflating the remaining ones. A PID-based algorithm was responsible for motion control in performance evaluation experiments. Bartlett et al. [40] proposed a design scheme that arranged two actuators crossed in pairs on the upper and lower sides of wrist. With an ordered combination of their outputs, it was possible to support almost all action modes, especially supination and pronation. Additionally, Al-Fahaam et al. [41] alternated three contraction muscles and two extensor bending muscles above the wrist to assist joints in all DoFs.
Cable-driven modules also performed very well for this type of system. Exo-Wrist [42] was used to facilitate patients’ participation in constraint-induced movement therapy, and strengthened the paretic wrist to complete a dart-throwing motion. This cable-driven device equipped with a corset active anchor would compress the forearm only when necessary, consequently improving safety and comfort. Chiaradia et al. [19] launched a soft exosuit for wrist flexion, which contained a glove that could increase transmission efficiency and improve pressure distribution.
Table 3.
Several representative exosuits for wrist assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| EXOWRIST [38] | 2015 | Extension/flexion, ulnar/radial deviation | Pneumatic actuator | Linear flex sensor, pressure sensor | PID-based control | Healthcare |
| Bartlett et al. [40] | 2015 | All DoFs | Pneumatic actuator | Pressure sensor | - | Healthcare |
| Al-Fahaam et al. [41] | 2016 | All DoFs | Pneumatic actuator | Pressure sensor | Direct pressure control | Healthcare |
| Zhu et al. [36] | 2017 | Flexion/extension | Pneumatic actuator | Inertial measurement unit (IMU), pressure sensor | - | Healthcare |
| SWS [37] | 2019 | Flexion/extension, radial/ulnar deviation | Pneumatic actuator | Pressure sensor | - | Healthcare |
| Exo-Wrist [42] | 2019 | Dart-throwing motion | Cable-driven module | Load cell | - | Healthcare |
| Jeong et al. [20] | 2019 | Extension/flexion, ulnar/radial deviation | Shape memory alloy-based actuator | - | - | Healthcare |
| Chiaradia et al. [19] | 2020 | Flexion | Cable-driven module | IMU, force sensor | Admittance controller | Physical enhancement |
There were also some scholars who attempted to study shape memory alloy-based wearable robots for the wrist. Jeong et al. [20] made use of this material to fabricate highly stretchable actuators, and applied five of them to achieve assistance for multiple actions including flexion, extension, ulnar deviation and radial deviation. To improve the system response speed, they further investigated the active cooling system with coolant circulation, and explored the application effects of different coolants [43].
2.1.4. Multi-Joints in the Upper Extremity
When the human arm is executing typical daily movements, it often requires close coordination of the shoulder, elbow and wrist to generate power. Therefore, selecting certain joints for assistance and designing a more comprehensive upper extremity system should be of great significance for improving versatility and efficiency. Some works on multi-joint exosuits are shown in Table 4.
CRUX [44] combined seven cables for power transmission and six micromotors for torque generation to achieve strength amplification during humeral rotation, elbow flexion/extension, wrist pronation/supination, lateral shoulder raise, and forward shoulder raise/lower. It determined the optimal cable paths of minimal extension by conducting measurement experiments and could be operated using either a two-axis analog joystick or a closed-loop controller. Paired with virtual reality technology, it was applied to a novel rehabilitative experience called Project Butterfly [45]. Relevant experiments demonstrated its performance including feasibility, ease of use and comfort. Samper-Escudero et al. [21] and Shi et al. [22] also developed cable-driven wearable systems to provide assistance for both shoulder and elbow.
After developing a flexible driving structure named “18 Weave” with thin McKibben muscle, Abe et al. [46] constructed an exosuit based on it to support upper limb movements such as shoulder flexion and elbow flexion. The PowerGrasp [47] belonged to a modular pneumatic system which adjusted the chamber’s stiffness to support shoulder, elbow, and wrist/finger during assembly. Authors have carried out research on automated fatigue detection and classification to give advice on rest or to adjust support for workers.
Auxilio [48] was a lightweight exosuit equipped with three twisted string actuators, which offered dynamic rehabilitation of shoulder flexion, shoulder abduction, and elbow flexion. The relevant authors detailed the working principle and carried out analyses and experiments on kinematics and force.
Table 4.
Upper extremity exosuits for multi-joint assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| CRUX [44] | 2017 | Assistance for shoulder, elbow and wrist | Cable-driven module | IMU | Human-in-the-loop control or closed-loop | Healthcare |
| Auxilio [48] | 2017 | Shoulder flexion/abduction, elbow flexion | Twisted string actuator | Motion sensor device | Mirror therapy | Healthcare |
| Abe et al. [46] | 2019 | Shoulder flexion and elbow flexion | Pneumatic actuator | Pressure sensor | - | Physical enhancement |
| Samper-Escudero et al. [21] | 2020 | Flexion of shoulder and elbow | Cable-driven module | Flexion sensor, encoder | Sliding mode controller | Physical enhancement |
| PowerGrasp [47] | 2021 | Assistance for shoulder, elbow and wrist | Pneumatic actuator | IMU | Adaptive pose-dependent control | Physical enhancement |
| Shi et al. [22] | 2022 | Flexion/extension for shoulder and elbow, adduction/abduction for shoulder | Cable-driven module | IMU, encoder, tension sensor | Torque estimation-based Control | Healthcare |
2.2. Lower Extremity Exosuit
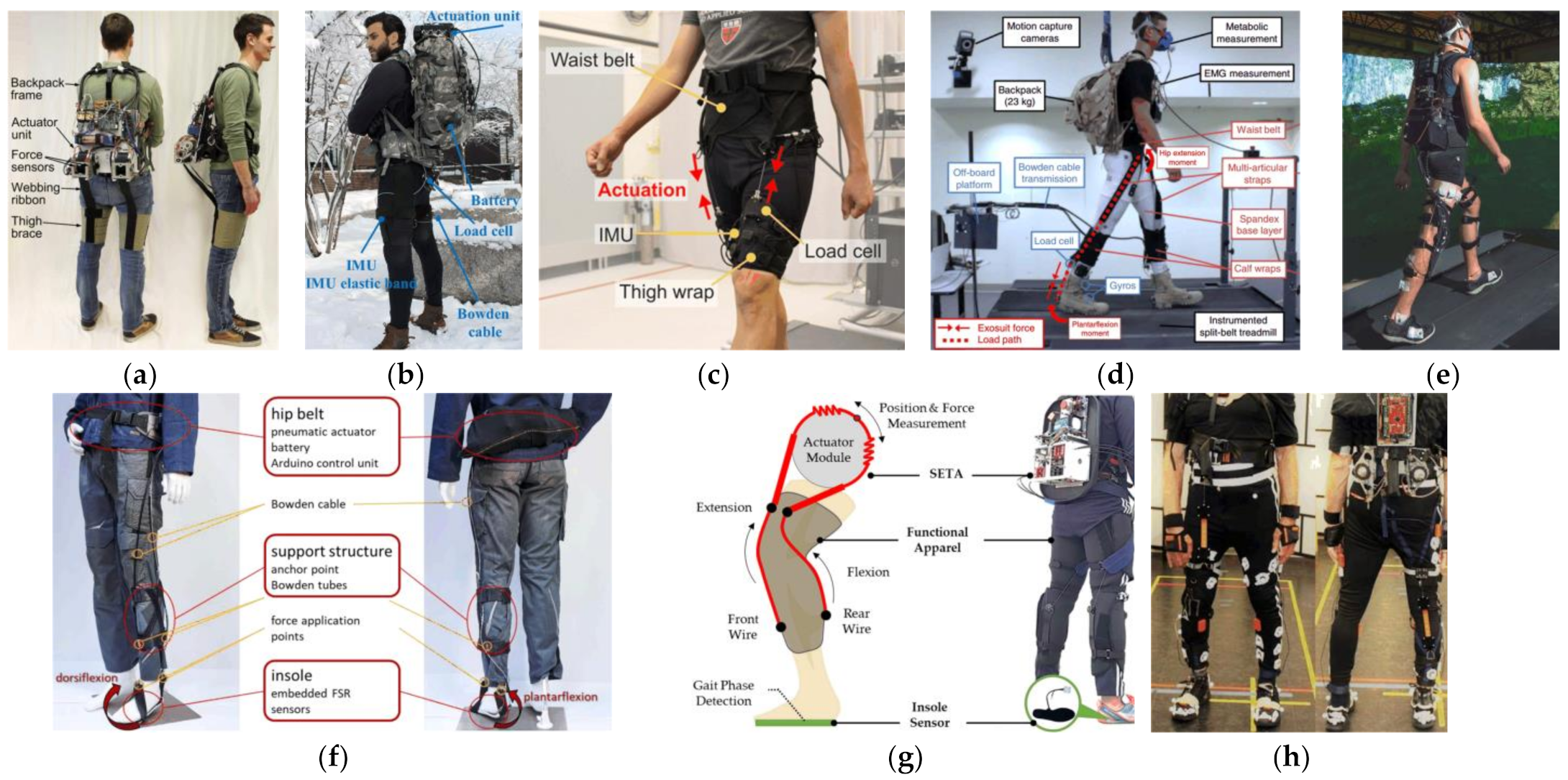
The lower extremity system needs to provide assistance for the hip, knee or ankle to help a user walk or climb stairs. Several representative exosuits are shown in Figure 2.
2.2.1. Hip
The human hip belongs to a typical enarthrosis that connects the lower extremity to the torso. It consists of the femoral head and acetabulum in physiological structure and can perform actions along multiple axes including flexion/extension, adduction/abduction, and internal/external rotation. There are several representative hip exosuits in Table 5.
The hip exosuit proposed by Walsh and his team preferred to assist joint extension at first. In [49], a portable wearable robot was designed with a spooled-webbing actuator mounted onto the back. Ribbons attached to thigh braces could produce about 30% of natural joint torque during level-ground walking. In [50], they described implementation details of a mono-articular untethered system with Bowden cables and mobile actuators. In order to explore its effect on metabolic cost and retention of metabolic improvement, some subjects participated in multiple training sessions to demonstrate energetic adaptation. Much research has been carried out by using tethered cable-driven systems which usually needed to work together with the treadmill and the off-board actuation platform [57,58,59,60]. Although this implementation sacrificed portability, it could reduce the additional load borne by a person, thereby improving assistive efficiency and wearing comfort. Afterwards, in 2022 they designed a lightweight exosuit for hip flexion and applied human-in-the-loop optimization to individualize assistance, achieving significant reduction in metabolic expenditure [51].
Table 5.
Several representative exosuits for hip assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| Asbeck et al. [49] | 2015 | Extension | Spooled-webbing actuator | Load cell, encoder, footswitches | Position control | Military application |
| Jin et al. [61] | 2017 | Flexion | Spooled-webbing actuator | Load cell, gyroscope | Tension force control | Physical enhancement |
| John et al. [62] | 2017 | Multiple DoFs | Cable-driven module | Force sensor | Proportional feedback velocity controller | Physical enhancement |
| Haufe et al. [63] | 2020 | Flexion | Passive actuator | - | - | Physical enhancement |
| Yang et al. [64] | 2021 | Flexion | Passive actuator | Load cell | - | Physical enhancement |
| Chen et al. [65] | 2021 | Flexion | Cable-driven module | IMU, load cell | Gait identification, admittance controller, position controller | Physical enhancement |
| Kim et al. [51] | 2022 | Flexion | Cable-driven module | IMU, load cell | Force control based on Human-in-the-loop optimization | Physical enhancement |
| Yang et al. [66] | 2022 | Abduction | Cable-driven module | IMU, load cell | High and low-level controller | Healthcare |
| Tricomi et al. [67] | 2022 | Flexion | Cable-driven module | IMU | Adaptive oscillators-based control | Physical enhancement |
In terms of hip flexion assistance, there were many different options for providing desired joint torque. Jin et al. [61] proposed a soft wearable robot that utilized winding belts for power transmission, and then conducted evaluation experiments of metabolic cost on occasions when elderly persons were implementing long-distance level and inclined walking [68]. Some researchers made full use of elastic elements and textile materials to build passive exosuits and explored their biomechanical effects during walking [63] or running [64]. The prototype based on Bowden cables could deliver the motor output along a fixed path to the anchor point of the anterior thigh, and lead to a metabolic reduction effect as well [65,67].
In [66], an exosuit for augmenting hip abduction was proposed to maintain the coronal angle of the pelvis basically stable. It aimed at counteracting adverse impacts of external knee adduction moment.
Obviously, it was quite necessary to simultaneously assist the multiple actions of the hip. John et al. [62] presented a wearable prototype which incorporated a novel concept of a cross-wire structure. Through selectively driving a subset of four Bowden cables arranged in a cross form, it generated joint torque in six directions to strengthen multi-DoF hip movements. Subsequent studies demonstrated that this system could be applied to induce turning and control walking direction for the wearer [69].
2.2.2. Knee
As the largest joint and one of the most complex ones in the human body, the knee consists of the lower femur, upper tibia and patella, and is reinforced by ligaments. Its motor function is mainly reflected in flexion and extension. Considering that damage may occur easily under large loads, it makes sense to provide assistance for knee movements. Table 6 describes some exosuits that assist the knee joint.
Applicable to help the elderly go upstairs in ordinary living, a soft suit called Hitexosuit [70] played a crucial part in enhancing knee extension. Its twisted string actuator simulated muscle contraction to generate force, which could assist in propelling the body upwards at just the right moment.
Park et al. [71] developed a cable-driven exosuit that integrated flexible textiles and a rigid frame. The main purpose of using rigid components was to extend the momentarm for knee extension. To support knee extension and flexion for stair ascent and descent, Lee et al. [72] proposed a system with a series elastic actuator activating both front and rear wires. On the one hand, this design scheme enhanced the flexibility and compliance of wire during power transmission, while on the other hand, it could obtain the interaction force between human and robot by detecting spring deformation.
With respect to pneumatic knee exosuits, Sridar et al., carried out a series of exploratory studies. In [76], the authors fabricated two soft-inflatable actuators with different cross-sectional shapes to compare their output performance, and picked out the I-shape to build a wearable robot for knee extension rehabilitation. Afterwards, they detailed how to detect human gait and control actuator stiffness, consequently generating the desired torque during the swing phase [77]. In [73], an untethered exosuit was proposed which adopted inflatable actuator composites instead of inflatable fabric beams. Benefiting from its higher actuation speed and lower energy loss, a portable pneumatic source could be applied to the wearable system. In addition, referring to the accordion structure, Fang et al. [74] designed a system based on foldable pneumatic bending actuators. A wearable device named SLAK [75] applied pleated pneumatic interference actuators to produce high torque for sit-to-stand tasks.
2.2.3. Ankle
The ankle contributes significantly to some physiological functions, such as weight support, stability maintenance and impact bearing. Its main DoFs include plantarflexion/dorsiflexion, varus/valgus, and internal/external rotation. As shown in Table 7, many scholars have adopted a variety of methods to strengthen this human joint.
The team, led by C. J. Walsh, also conducted continuous research on cable-driven unilateral exosuits for ankle rehabilitation which could augment plantarflexion and dorsiflexion [78,79]. According to their description, this system had a positive effect on improving forward propulsion and ground clearance so that it could help stroke patients perform more natural and economical locomotion [80]. They not only described the biological mechanisms about exosuit-induced metabolic reductions, which seemed related to the center of mass (COM) power produced by each limb [81], but also pointed out that physical interface dynamics had great influence on power transmission and human augmentation benefits [82]. To accommodate variability during hemiparetic walking, specialized schemes such as offline assistance optimization [83] and muscle-based assistance [84] took charge of customizing the assistance profile. Some evaluation experiments [85,86] were carried out with stroke survivors, demonstrating that this system could lead to an increase in walking speed/distance and a decrease in metabolic expenditure. The exosuit designed by Schubert et al. [54] transmitted power to the ankle through utilizing Bowden cables, and realized plantarflexion support and dorsiflexion augmentation based on autonomous gait recognition.
Table 7.
Several representative exosuits for ankle assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| Park et al. [87] | 2011 | Dorsiflexion, inversion and eversion | Pneumatic actuator | Strain sensor, IMU, pressure sensor | Feed-forward controller or feedback proportional controller | Healthcare |
| Bae et al. [79] | 2018 | Plantarflexion and dorsiflexion | Cable-driven module | IMU, load cell | Hierarchical closed-loop controller | Healthcare |
| ExoBoot [88] | 2018 | Plantarflexion | Pneumatic actuator | Pressure sensors, IMU | Open loop pressure controller | Physical enhancement |
| Thalman et al. [89] | 2019 | Lateral/medial support, dorsiflexion, | Pneumatic actuator | Force sensitive resistor, fluidic pressure sensor | Bang-bang control | Healthcare |
| Yandell et al. [90] | 2019 | Plantarflexion | Passive actuator | - | - | Physical enhancement |
| Siviy et al. [83] | 2020 | Plantarflexion | Cable-driven module | IMU, encoder, load cell | Admittance controller | Healthcare |
| Nuckols et al. [84] | 2021 | Plantarflexion | Cable-driven module | IMU, load cell | PI force control loop cascaded with current loop | Physical enhancement |
| Schubert et al. [54] | 2021 | Plantarflexion and dorsiflexion | Pneumatic actuator with Bowden cable | Force sensing resistor, IMU | Bang-bang control | Healthcare |
Inspired by muscle-tendon architecture, an active soft orthotic device proposed in [87] applied three pneumatic artificial muscles to help perform ankle dorsiflexion, inversion and eversion. The ExoBoot [88], a soft inflatable robot, made use of a textile-based actuator installed on foot and shin, and produced assistive torque for plantarflexion. Thalman et al. [89] developed a sock-like pneumatic exosuit to help impaired individuals restore natural gait. Its front-mounted actuator aimed at enhancing dorsiflexion within the swing phase, while the variable stiffness actuators fixed on the lateral and medial sides could offer support during heel strike.
Yandell et al. [90] proposed an unpowered prototype configured seamlessly underneath clothing, which blended perfectly with the human body. Arranged parallel to the gastrocnemius, a stiff assistance spring acted to assist plantarflexion from early stance to late stance and was released during the leg swing to avoid impeding joint motion. An under-the-foot clutch mechanism realized the automatic switch between its engagement and disengagement according to periodic friction generated by plantar pressure.
2.2.4. Multi-Joints in the Lower Extremity
Obviously, the coordinated output of hip, knee and ankle ensures the effective execution of lower limb movements. Although assisting multiple joints seems more in line with the application requirements, it may make the system rather complex and heavy. Therefore, relevant research has always paid attention to the balance between lightweight and high performance. Some lower extremity exosuits that provide multi-joint assistance are presented in Table 8.
Research of Walsh and his team aimed to study cable-driven exosuits for both hip and ankle. In [95,96], a portable prototype combined the suit composed of multiple webbings with Bowden cables extending from the pelvis to the heel, which achieved the synthesis of passive and active assistance. Apart from this multiarticular load path for ankle plantarflexion and hip flexion, a separate load path for hip extension was added to an improved wearable system [97]. With the support of this design, they verified the individual parameter tuning method based on positive ankle augmentation power [98] and conducted evaluation experiments under conditions where the device was powered, unpowered or unpowered with equivalent mass removed [1]. Another commonly used system possessed a combined form that enhanced ankle plantarflexion directly with an off-board cable-driven platform and supported hip flexion indirectly through textile architecture. Based on this, they utilized a method to independently control its assistance level during the positive-power phase and the negative-power phase [99] and compared the performance between an ankle moment inspired technique and an ankle positive power inspired technique [100]. The relationship between assistance magnitude and metabolic cost was also established, while simultaneously exploring the variation of underlying gait mechanics [92]. In addition to the studies above, they also proposed a pneumatic exosuit based on McKibben actuators, a triangulated webbing network and an off-board compressor, which aimed to augment hip, knee and ankle simultaneously [91].
Myosuit [93] adopted a biarticular architecture to work against gravity, with active tendons and passive ligaments, respectively, in charge of hip/knee extension support and hip/knee flexion assistance. The load-intensive activities of daily living including sitting transfers could benefit from a closed-loop force controller for gravity compensation. Relevant researchers confirmed the safety and feasibility of activity-based training with this wearable device [101], and studied the process that new users adapted for robotic assistance [53].
The European Consortium planned to develop a modular lower extremity exosuit (XoSoft) targeting people with partial mobility limitations. Based on a first prototype which assisted the flexion of hip and knee, the basic functionality was analyzed from aspects of practicability, usability, comfort and kinematics [102]. Subsequently, Beta 1 prototype [56] introduced a quasi-passive actuation concept to transfer energy between different gait phases with the combination of electromagnetic clutch and elastic band. Later, an upgraded version known as the Gamma prototype [94] adopted pneumatic quasi-passive actuation which contained a textile-based clutch actuated by vacuum pressure, and provided relatively comprehensive assistance for hip flexion/extension, knee flexion/extension and ankle plantarflexion/dorsiflexion.
2.3. Back-Assist Exosuit
The back-assist exosuit attempts to relieve biomechanical loads on the lumbar spine through active or passive assistance. It has the capability to help perform physically demanding tasks and prevent the wearer from suffering back pain or injury. Several representative prototypes are described in Table 9.
In terms of back assistance, many studies preferred to develop exosuits with passive actuators, which present advantages such as simplicity, practicality and lightness. A biomechanically assistive garment proposed in [103] distributed the load from the waist to the shoulder and thigh, with two crossed elastic bands connecting the upper- and lower-body interfaces. Exosuit proposed in [104] (see Figure 3a), HeroWear Apex [105] (see Figure 3b) and Auxivo LiftSuit [106] followed a similar design concept, and then introduced the mode switching method that provided lumbar assistance when engaged and maintained full slack when disengaged. Additionally, the BASE emulator [107] was developed to analyze massive design factors of back-assist exosuits, equipped with onboard load cells for interaction force detection, sEMG electrodes to obtain muscle activities, and a modular moment arm that allowed testing for different configurations of passive actuation.
Active devices could generate arbitrary assistance as needed and did not require the process of energy storage. The AB-Wear suits developed by Inose et al., could be divided into endoskeleton types [108] and semi-endoskeleton types [109]. The former contained two artificial muscles, a balloon actuator and an amplification mechanism, while the latter was additionally equipped with reduction mechanism to reduce compressive forces borne by the human back. Govin et al. [110] designed a soft robotic orthosis to help patients maintain good posture and stabilize the lumbosacral spine. Two pneumatic bladders arranged in parallel make it possible to exert enough assistive torque on the back. Furthermore, the prototype in [111] relied on the combination of a hyper-redundant continuum mechanism and tethered cable-driven platform to support the waist without restricting natural movements. ABX [112] applied two Bowden cables with an “X” pattern to provide torque for multiple DoFs of the lumbosacral joint. Its control system containing a finite state machine and force controller was responsible for state pattern detection, cable tension update, motor velocity calculation and so on. In addition, the soft power suit equipped with twisted string actuators could also be well qualified for assisting trunk movements [113].
Table 9.
Several representative exosuits for back assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| AB-Wear [109] | 2017 | Trunk extension | Pneumatic actuator | Load cell, pressure sensor | External operator | Physical enhancement |
| Biomechanically assistive garment [103] | 2018 | Trunk extension | Passive actuator | - | - | Physical enhancement |
| Govin et al. [110] | 2018 | Trunk extension | Pneumatic actuator | IMU | Control based on position of spine | Healthcare |
| Yang et al. [111] | 2019 | Trunk extension | Cable-driven module | Load cell, IMU | Virtual impedance control strategy | Physical enhancement |
| Yao et al. [113] | 2019 | Trunk extension | Twisted string actuator | Force sensor, IMU | Control according to motion intention and conditions | Physical enhancement |
| Lamers et al. [104], HeroWear Apex [105] | 2021 | Trunk extension | Passive actuator | - | - | Physical enhancement |
| Auxivo LiftSuit [106] | 2022 | Trunk extension | Passive actuator | - | - | Physical enhancement |
| BASE emulator [107] | 2022 | Trunk extension | Passive actuator, moment arm | Load cell, surface EMG electrodes | - | Physical enhancement |
| ABX [112] | 2022 | Flexion/extension, axial rotation, and lateral bending | Cable-driven module | Load cell, IMU | Two-tier control containing finite state machine and force controller | Physical enhancement |
3. Key Technologies
The soft wearable robot is a type of mechatronic equipment which integrates multiple subsystems and research points. This section will focus on the principles and implementation of the relevant key technologies.
3.1. Material and Structure
Relevant studies seldom reveal the underlying design principles of wearable textile architecture. If not optimized accordingly, it will seriously weaken the interaction comfort and transmission efficiency.
For powered exosuits, it is necessary to maximize the fabric stiffness along the direction of force transmission [96]. The force on the flexible medium is delivered to human joints through bindings. Bindings with high elasticity will deform greatly during this process, consequently reducing the effective displacement of flexible medium and absorbing part of the energy provided. Therefore, it will make the control error increase, and eventually significantly weaken effectiveness of power assistance. To prevent this, high-stiffness fabrics should be used to customize the stressed parts of the wearable suit and should fit tightly to the body to avoid wrinkles. For example, CRUX [44] adopted a neoprene base layer covering the torso and arms, which could maintain enough rigidity for anchoring on-board components and actuation forces.
Efforts should be made to guarantee comfort while wearing [114]. Excessive normal pressure and shear force between the wearer and suit usually make people feel uncomfortable. Exosuits with such undesirable properties will accelerate the human body into a state of fatigue and even lead to poor blood circulation. Localized shear force at the skin surface can generally be minimized by optimizing force transmission, while normal pressure will be reduced by increasing the contact area.
It is recommended to appropriately utilize the physiological structure of the human body to fix the end of the textile. If the friction between the binding and body surface becomes insufficient during the man–machine interaction, the former may move up and down along the limb or torso under the drive of the external force. Continuous reciprocating sliding will possibly lead to skin damage and is not conducive to improving system performance. Using the specific body structure to limit the bindings seems to be an effective solution. For example, for a lower extremity system that transmits power along the entire leg, we can choose the pelvis and feet as fixed positions and connect several straps and bindings in series between them; for upper extremity systems, textiles can be attached between the vest on the torso and the glove on the hand to ensure the relative stability of the position between the suit and wearer.
3.2. Actuator and Power Transmission
According to the review of research status, the commonly used driving units of soft wearable robot can be divided into the following categories. This section aims at describing the working principles and features, and analyzing their advantages and disadvantages in applications.
Cable-driven module: Such a device often utilizes a combination of cable and sheaths to transmit power from the prime mover to corresponding joints [95]. The sheath installed on the body surface can be set directly according to any desired path between the actuator and anchor point, thereby constraining retraction and release of inner Bowden cables along the fixed route. This mechanism facilitates the flexible configuration of the structural layout and enhances the compactness of the human–machine integration [115]. When no assistance is provided, the slack Bowden cable will not substantially impede the wearers’ movement, as if they put on a normal piece of clothing.
However, there are some inherent problems with this wearable application of Bowden cables. The friction generated by the relative movement between cable and sheath will hinder the power transmission process. It leads to dissipation of part of the mechanical work and reduction in the assistive efficiency. In addition, the cable slack will delay the force transmission to joints, which exacerbates the response hysteresis and nonlinear behavior of the system [17].
Pneumatic actuator: When the internal air pressure of this device is adjusted, the volume or shape changes accordingly, thereby generating torques on the human joint connected with it. Generally, it’s necessary to apply an air source to complete the inflation or deflation [73]. During this process, the pneumatic actuator will execute actions such as elongation, shortening or bending. If it is properly coordinated with the limb movements, assistance can be provided at the corresponding human joint.
A pneumatic actuator has the advantage of a high power-to-weight ratio, so that it can adapt to application scenarios with a large joint load. For example, SLAK could generate a maximum torque of 324 Nm at the knee, exceeding the peak value required for sit-to-stand motion [75]. However, most pneumatic exosuits require external connection to a large and heavy air source, which makes them basically unportable.
Twisted string actuator: The basic architecture is formed with one end of two or more parallel strands fixed on the motor output shaft and the other end connected to the anchor point placed on the limb. Rotating the motor makes these strands intertwine with each other, consequently shortening their length and driving the joint to move. This mechanism enables the successful conversion from motor rotation to tendon contraction [116].
Twisted string actuators appear to be well-known for their simple and compact structure. Small-sized motors with high revolving speed and small torque are adequate for the power output tasks. The strands can completely replace the relatively complex reducer to perform the same function. These all benefit from the inherent property of a high reduction ratio. In addition, it can achieve a fairly high transmission efficiency [117].
Even so, the disadvantages of twisted string actuators cannot be ignored. Since the transmission ratio changes as the strands continue to twist, it adds to the difficulty of precise control. Repeated twisting and untwisting will aggravate fatigue damage, thus reducing its actual service life.
Shape memory alloy-based actuators: When exposed to a certain stimulus, the crystal arrangement tends to go through the phase transformation, causing the shape to change temporarily. Once this external intervention disappears, it gradually returns to the original memory state [118]. By actively applying or withdrawing stimuli, this actuator can be controlled to produce joint assistance as desired. Nickel titanium (NiTi) alloy belongs to the most commonly used material, which can be actuated by Joule heating.
Compared to other forms, shape memory alloy-based actuators are characterized by high power density and high tensile stress. However, although the contraction process is conducted quickly, it takes a lot of time to restore the original shape, resulting in a very low driving frequency. Some studies have attempted to utilize active cooling systems to improve actuation speed [43], but it increases the structural complexity for wearable robots. In addition, issues such as hysteresis and creep also adversely affect its performance.
Passive actuator: Passive elements mainly consist of springs and elastic fabrics. Arranged in parallel with muscles involved, they can store energy during one fixed phase of the limb’s movement and release it to generate assistance during another fixed phase [63].
Obviously, this approach makes the system extremely simple and lightweight. However, its effect on power assistance seems very limited considering that no additional energy can be generated.
Quasi-passive actuation: This refers to the combination of passive elements (namely springs, elastic cords or dampers), and quasi-passive elements (namely variable dampers or electromagnetic clutches). Exosuits using this method do not provide active torque at joints but can decide when passive assistance is deactivated or activated [119].
This configuration will make the system compact and lightweight, which is suitable for assisting multiple DoFs at the same time. Furthermore, it can utilize quasi-passive elements to adjust the period and magnitude of energy stored and released by passive elements in a planned way. The disadvantage is also that the effect of power assistance behaves in a relatively limited way.
3.3. Perception and Motion Control
Powered exosuits need to perceive the motion and state information of human–machine systems, based on which they can apply appropriate control algorithms to produce extra joint power. At first, we discuss related research on some typical control methods of upper extremity systems, which can be summarized as follows.
Mirroring algorithm (mimetic control): According to the reference input of a normal arm, this method can guarantee to help the target arm move to basically the same position. Auxilio adopted a Kinect Xbox 360 motion sensor device to measure the reference joint angle and the target one for making comparisons [48], while CRUX achieved a similar function via an IMU network [120].
Gravity compensation control: This algorithm will exert additional torques on human joints, compensating for the burden of limb gravity. The assistive values can be estimated according to the tension measured by force sensors. In [19,26], it was combined with velocity closed loop or an admittance controller to construct a more perfect motion control architecture.
Adaptive control: This strategy aims at automatically adjusting certain control parameters or laws so that it can adapt to dynamic changes in man–machine interaction. In [121], a model reference adaptive control made the performance of closed-loop controller basically consistent with that of a reference model through an adaption mechanism, to meet the tracking requirements for specific practice profiles of stroke patients. An adaptive assistive controller proposed in [122] tried to provide feedforward assistance with the inverse dynamic model learnt online.
Backlash compensation control: This method is applicable to cable-driven exosuits for improving the performance of motion control. Considering that the friction between cable and sheath will cause transmission delay, some researchers established a backlash hysteresis model and proposed two control strategies for compensation including a backlash observer-based controller and nonlinear adaptive controller to solve this problem [17]. In another article, a hierarchical control paradigm aimed at decoding the wearer’s motion intention at a high level, compensating backlash at the middle level, and driving the actuator at a low level [20].
Biosignal-based control: A promising method to control exosuits based on parsing human intentions from physiological signals. A neural network-enhanced torque estimation control strategy [123] was developed via combined application of surface electromyogram sensors, IMUs, load cells and encoders, which contained three functional parts including the neural-network adjustment module, the joint torque estimation module, and the closed-loop PID-based control module. Another sEMG-based controller relied on a double threshold strategy with a standard PID regulator to compensate the wearers’ muscle activities during a load carrying task [33]. In [35], a myoprocessor was designed based on an EMG-driven musculoskeletal model to estimate joint torque, which could guarantee adaptive assistance to the elbow movement when holding different loads. In subsequent research, the authors further analyzed how assistance magnitude will affect muscular benefits with the myoprocessor [124] and compared it with a force control [125], which proved the effectiveness and advancement of this method. Furthermore, a torque estimation-based control strategy [22] took advantage of mechanomyography to obtain expected output of joints, and then established a torque closed loop to achieve motion assistance.
Because of the obvious regularity of walking or running, the control of lower extremity systems reflects different design concepts. Such exosuits often detect gait events through IMUs or plantar pressure sensors/foot switches and customize force or position profiles to assist joints at the appropriate period of a gait cycle. Some key assistive parameters can be adjusted through optimization algorithms to enhance human–machine adaptability. For example, the strategy proposed in [126] took scaled reference force trajectories as input and implemented force following process with the help of an admittance controller. A Bayesian optimization attempted to adjust the peaking and offset time of force profile to minimize the metabolic cost for walking [127]. Of course, there were also control methods that did not rely on gait detection. Myosuit adopted an anti-gravity control strategy, which estimated the required assistive force based on the current posture, and provided gravity compensation effects to the joints with the force closed loop [93].
3.4. Evaluation Methods
After the wearable robot is integrated and debugged, it needs to undergo specific tests to demonstrate the actual performance and provide a reference for subsequent optimization. The focus of these assessments may change according to different application requirements. We intend to choose the common and general ones for discussion.
Metabolic consumption: This evaluation primarily illustrates the effect of using exosuits on the variation of the wearer’s own energy expenditure [60]. The specific value is obtained by indirect measurement with a portable gas analysis system. Much research has measured carbon dioxide and oxygen rate to calculate metabolic power through a modified Brockway equation [50,64]. A large number of experimental results have proved that exosuits show an ability to reduce metabolic cost to different degrees.
Muscle activity: Joint output is accompanied by activation of corresponding muscle groups, during which bioelectrical signals come into being and can be captured by surface electromyography sensors [128]. After filtering the original sequence, its eigenvalues (such as the root mean square [65]) will be extracted to characterize the degree of muscle activity. In general, wearing an exosuit could contribute to reducing activation and relieving fatigue for human muscles.
Assistive torque/force: These indicators directly reflect the output capability of exosuits acting on human joints, which can be measured and calculated by force sensors. A larger value means a more significant effect on joint strengthening [57].
Kinematic analysis: By recording the variation of joint angles, this assessment attempts to compare the trend and range of limb movement before and after the usage of an exosuit. Generally, IMU or 3D motion capture can be used to complete the relevant measurements [96]. These experiments indicate that the exosuit brings very little changes to the natural movements of wearers.
Walking performance: Apparently this test only applies to lower extremity systems. Through measuring and analyzing walking speed, walking distance, ground clearance and other parameters, the actual effect of gait recovery and ambulation training will be illustrated [129]. The exosuit has a significant positive effect on improving walking performance.
Subjective evaluation: This aims to analyze the user opinions after hands-on experience, such as ease of putting on and taking off, and wearing comfort. These relevant data can be collected through a combination of tests and questionnaires [102]. By counting the scores of each subjective indicator, the specific application performance of an exosuit is finally obtained.
4. Applications and Challenges
Soft wearable robots are designed to play an important role in a variety of application scenarios. The main aspects can be summarized as follows.
Medical application: In the field of health service, the large population of elderly and disabled has brought about a growing demand for medical rehabilitation. Lightweight and flexible exosuits can replace traditional methods to provide convenient daily assistance and regular training for these people [8].
Military activity: Application to the military field can significantly improve the maneuvering speed, load capacity and endurance limit of soldiers. This wearable device may become a mounting platform for more electronic equipment and individual weapons, consequently enhancing the abilities of combat and survivability [130].
Manned spaceflight: The field of manned spaceflight is also a potential target [131]. Exosuits can be adaptively integrated with spacesuits to help astronauts carry more scientific instruments, while delaying muscle fatigue and extending extravehicular activity time [132]. These basic functions will effectively improve the efficiency of outer space exploration.
Industrial production: Workers can perform manual labor such as lifting, carrying and assembling more efficiently with the help of exosuits [133]. They possess the ability to relieve physical fatigue and improve working efficiency [47]. Besides, some illnesses and injuries associated with overstrain could be prevented if proper assistance is provided.
Personal usage: In the future, exosuits may become a smart wearable device widely used in the daily life of normal people, which will provide power assistance for various aspects such as recreational sports and housework. It will be highly integrated with human intelligence to provide users with a high-quality life at the technical level.
However, the current research on soft wearable robots basically is in the laboratory stage. There are still many problems that prevent them from being widely applied. Some of the challenges are listed below.
- The inherent characteristic of flexible power transmission increases the nonlinearity of the system and makes it more susceptible to disturbances. Therefore, it presents a challenge for precise motion control.
- In order to achieve multi-joint assistance in multiple DoFs, numerous actuators and complex structural layouts will be required. This is not conducive to a lightweight and compact design.
- Due to the special human-in-the-loop form and the obvious differences between most prototypes, the results of current performance test methods seem one-sided and imperfect. We need to build a unified standard evaluation framework to comprehensively reflect the actual effect and application value of every soft wearable robot.
- It is difficult to possess all excellent performance features such as portability, comfort, high efficiency and be lightweight at the same time. New or improved forms for power assistance need to be further developed.
5. Conclusions
In this paper, we have classified and discussed soft wearable robots for the upper limb, lower limb and back according to different joints, summarized the current usage of key technologies from the aspects of structure, actuator, control, and evaluation, and finally described the future applications and some problems hindering further development. This article tries to provide some references for future research in this field.
In conclusion, a series of soft wearable robots that assist different human joints have been designed for specific functional requirements in recent years. Relevant researchers have tried various methods to improve human–machine compatibility and assistive efficiency, which accumulate rich technical achievements in this process. The resulting prototypes may make outstanding contributions to many aspects of human life. However, the studies on soft wearable robots are still in the laboratory stage, which is far from practical application. We believe that future research may develop in several directions. Compatible and compact textile architectures should be further explored to make them similar to ordinary clothes. The development methods of lightweight and powerful actuators will become one of the research priorities, thereby raising the assistive efficiency of exosuits to a higher level. More comprehensive and efficient means of perception need to be proposed to achieve a perfect understanding of human intentions. More precise and compliant control strategies will be applied to enhance the movement consistency between human and machine.
Author Contributions
Methodology, data analysis, writing, Y.S.; Conceptualization, project administration, W.D.; Investigation, visualization, W.L.; Supervision, formal analysis, Y.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China under Grant No. U21A20120.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Not applicable.
Acknowledgments
The authors thank everyone who provided suggestions and assistance for this research and paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lee, S.; Kim, J.; Baker, L.; Long, A.; Karavas, N.; Menard, N.; Galiana, I.; Walsh, C.J. Autonomous multi-joint soft exosuit with augmentation-power-based control parameter tuning reduces energy cost of loaded walking. J. Neuroeng. Rehabil. 2018, 15, 66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rodriguez-Fernandez, A.; Lobo-Prat, J.; Font-Llagunes, J.M. Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments. J. Neuroeng. Rehabil. 2021, 18, 22. [Google Scholar] [CrossRef] [PubMed]
- Lowe, B.D.; Billotte, W.G.; Peterson, D.R. ASTM F48 Formation and Standards for Industrial Exoskeletons and Exosuits. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 230–236. [Google Scholar] [CrossRef] [PubMed]
- Aliman, N.; Ramli, R.; Haris, S.M. Design and development of lower limb exoskeletons: A survey. Robot. Auton. Syst. 2017, 95, 102–116. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Alicea, R.; Georgarakis, A.-M.; Haufe, F.L.; Wolf, P.; Masia, L.; Riener, R. Soft Robotic Suits: State of the Art, Core Technologies, and Open Challenges. IEEE Trans. Robot. 2022, 38, 1343–1362. [Google Scholar] [CrossRef]
- Koch, M.A.; Font-Llagunes, J.M. Lower-Limb Exosuits for Rehabilitation or Assistance of Human Movement: A Systematic Review. Appl. Sci. 2021, 11, 8743. [Google Scholar] [CrossRef]
- Thalman, C.; Artemiadis, P. A review of soft wearable robots that provide active assistance: Trends, common actuation methods, fabrication, and applications. Wearable Technol. 2020, 1, e3. [Google Scholar] [CrossRef]
- Peng, Z.; Huang, J. Soft Rehabilitation and Nursing-Care Robots: A Review and Future Outlook. Appl. Sci. 2019, 9, 3102. [Google Scholar] [CrossRef] [Green Version]
- Khomami, A.M.; Najafi, F. A survey on soft lower limb cable-driven wearable robots without rigid links and joints. Robot. Auton. Syst. 2021, 144, 103846. [Google Scholar] [CrossRef]
- Vatan, H.M.F.; Nefti-Meziani, S.; Davis, S.; Saffari, Z.; El-Hussieny, H. A review: A Comprehensive Review of Soft and Rigid Wearable Rehabilitation and Assistive Devices with a Focus on the Shoulder Joint. J. Intell. Robot. Syst. 2021, 102, 9. [Google Scholar] [CrossRef]
- Vidal, A.F.P.; Morales, J.Y.R.; Torres, G.O.; de Vázquez, F.J.S.; Rojas, A.C.; Mendoza, J.A.B.; Cerda, J.C.R. Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade. Actuators 2021, 10, 166. [Google Scholar] [CrossRef]
- Natividad, R.F.; Yeow, C.H. Development of a soft robotic shoulder assistive device for shoulder abduction. In Proceedings of the 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 989–993. [Google Scholar]
- Thompson, N.; Sinha, A.; Krishnan, G. Characterizing Architectures of Soft Pneumatic Actuators for a Cable-Driven Shoulder Exoskeleton. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 570–576. [Google Scholar]
- O’Neill, C.T.; McCann, C.M.; Hohimer, C.J.; Bertoldi, K.; Walsh, C.J. Unfolding textile-based pneumatic actuators for wearable applications. Soft Robot. 2021, 9, 163–172. [Google Scholar] [CrossRef] [PubMed]
- Park, D.; Cho, K.J. Development and evaluation of a soft wearable weight support device for reducing muscle fatigue on shoulder. PLoS ONE 2017, 12, e0173730. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiloyannis, M.; Chiaradia, D.; Frisoli, A.; Masia, L. Physiological and kinematic effects of a soft exosuit on arm movements. J. Neuroeng. Rehabil. 2019, 16, 29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dinh, B.K.; Xiloyannis, M.; Cappello, L.; Antuvan, C.W.; Yen, S.-C.; Masia, L. Adaptive backlash compensation in upper limb soft wearable exoskeletons. Robot. Auton. Syst. 2017, 92, 173–186. [Google Scholar] [CrossRef]
- Nassour, J.; Zhao, G.; Grimmer, M. Soft pneumatic elbow exoskeleton reduces the muscle activity, metabolic cost and fatigue during holding and carrying of loads. Sci. Rep. 2021, 11, 12556. [Google Scholar] [CrossRef] [PubMed]
- Chiaradia, D.; Tiseni, L.; Xiloyannis, M.; Solazzi, M.; Masia, L.; Frisoli, A. An Assistive Soft Wrist Exosuit for Flexion Movements With an Ergonomic Reinforced Glove. Front. Robot. AI 2020, 7, 595862. [Google Scholar] [CrossRef]
- Jeong, J.; Yasir, I.B.; Han, J.; Park, C.H.; Bok, S.-K.; Kyung, K.-U. Design of Shape Memory Alloy-Based Soft Wearable Robot for Assisting Wrist Motion. Appl. Sci. 2019, 9, 4025. [Google Scholar] [CrossRef] [Green Version]
- Samper-Escudero, J.L.; Gimenez-Fernandez, A.; Sanchez-Uran, M.A.; Ferre, M. A Cable-Driven Exosuit for Upper Limb Flexion Based on Fibres Compliance. IEEE Access 2020, 8, 153297–153310. [Google Scholar] [CrossRef]
- Shi, Y.; Dong, W.; Lin, W.; He, L.; Wang, X.; Li, P.; Gao, Y. Human Joint Torque Estimation Based on Mechanomyography for Upper Extremity Exosuit. Electronics 2022, 11, 1335. [Google Scholar] [CrossRef]
- O’Neill, C.T.; Phipps, N.S.; Cappello, L.; Paganoni, S.; Walsh, C.J. A Soft Wearable Robot for the Shoulder: Design, Characterization, and Preliminary Testing. In Proceedings of the International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1672–1678. [Google Scholar]
- Varghese, R.J.; Lo, B.P.L.; Yang, G.-Z. Design and Prototyping of a Bio-Inspired Kinematic Sensing Suit for the Shoulder Joint: Precursor to a Multi-DoF Shoulder Exosuit. IEEE Robot. Autom. Lett. 2020, 5, 540–547. [Google Scholar] [CrossRef] [Green Version]
- Little, K.; Antuvan, C.W.; Xiloyannis, M.; de Noronha, B.A.P.S.; Kim, Y.G.; Masia, L.; Accoto, D. IMU-based assistance modulation in upper limb soft wearable exosuits. In Proceedings of the 16th IEEE International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 1197–1202. [Google Scholar]
- Chiaradia, D.; Xiloyannis, M.; Antuvan, C.W.; Frisoli, A.; Masia, L. Design and embedded control of a soft elbow exosuit. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 565–571. [Google Scholar]
- Cappello, L.; Binh, D.K.; Yen, S.-C.; Masia, L. Design and preliminary characterization of a soft wearable exoskeleton for upper limb. In Proceedings of the 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 623–630. [Google Scholar]
- Canesi, M.; Xiloyannis, M.; Ajoudani, A.; Bicchi, A.; Masia, L. Modular One-to-many Clutchable Actuator for a Soft Elbow Exosuit. In Proceedings of the International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1679–1685. [Google Scholar]
- Xiloyannis, M.; Annese, E.; Canesi, M.; Kodiyan, A.; Bicchi, A.; Micera, S.; Ajoudani, A.; Masia, L. Design and validation of a modular one-to-many actuator for a soft wearable exosuit. Front. Neurorobot. 2019, 13, 39. [Google Scholar] [CrossRef] [PubMed]
- Thalman, C.M.; Lam, Q.P.; Nguyen, P.H.; Sridar, S.; Polygerinos, P. A Novel Soft Elbow Exosuit to Supplement Bicep Lifting Capacity. In Proceedings of the 25th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6965–6971. [Google Scholar]
- Ang, B.W.K.; Yeow, C.-H. Design and Modeling of a High Force Soft Actuator for Assisted Elbow Flexion. IEEE Robot. Autom. Lett. 2020, 5, 3731–3736. [Google Scholar] [CrossRef]
- Gao, X.F.; Sun, Y.; Hao, L.N.; Xiang, C.Q.; Cheng, H.T. A New Type of Soft Pneumatic Elbow. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 2681–2686. [Google Scholar]
- Hosseini, M.; Meattini, R.; San-Millan, A.; Palli, G.; Melchiorri, C.; Paik, J. A sEMG-Driven Soft ExoSuit Based on Twisted String Actuators for Elbow Assistive Applications. IEEE Robot. Autom. Lett. 2020, 5, 4094–4101. [Google Scholar] [CrossRef]
- Dinh, B.K.; Xiloyannis, M.; Antuvan, C.W.; Cappello, L.; Masia, L. Hierarchical Cascade Controller for Assistance Modulation in a Soft Wearable Arm Exoskeleton. IEEE Robot. Autom. Lett. 2017, 2, 1786–1793. [Google Scholar] [CrossRef]
- Lotti, N.; Xiloyannis, M.; Durandau, G.; Galofaro, E.; Sanguineti, V.; Masia, L.; Sartori, M. Adaptive Model-Based Myoelectric Control for a Soft Wearable Arm Exosuit: A New Generation of Wearable Robot Control. IEEE Robot. Autom. Mag. 2020, 27, 43–53. [Google Scholar] [CrossRef]
- Zhu, M.; Adams, W.; Polygerinos, P. Carpal Tunnel Syndrome Soft Relief Device for Typing Applications. In Proceedings of the 2017 Design of Medical Devices Conference, Minneapolis, MN, USA, 10–13 April 2017. [Google Scholar]
- Ang, B.W.K.; Yeow, C.H. Design and Characterization of a 3D Printed Soft Robotic Wrist Sleeve with 2 DoF for Stroke Rehabilitation. In Proceedings of the 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 577–582. [Google Scholar]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Design and development of an exoskeletal wrist prototype via pneumatic artificial muscles. Meccanica 2015, 50, 2709–2730. [Google Scholar] [CrossRef]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Motion Control of a Novel Robotic Wrist Exoskeleton via Pneumatic Muscle Actuators. In Proceedings of the 20th IEEE Conference on Emerging Technologies and Factory Automation (ETFA), University of Luxembourg, Interdisciplinary Centre Security Reliability & Trust, Luxembourg, 8–11 September 2015. [Google Scholar]
- Bartlett, N.W.; Lyau, V.; Raiford, W.A.; Holland, D.; Gafford, J.B.; Ellis, T.D.; Walsh, C.J. A Soft Robotic Orthosis for Wrist Rehabilitation. J. Med. Devices 2015, 9, 030918. [Google Scholar] [CrossRef]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. Wrist Rehabilitation Exoskeleton Robot based on Pneumatic Soft Actuators. In Proceedings of the International Conference for Students on Applied Engineering (ICSAE), Newcastle upon Tyne, UK, 20–21 October 2016; pp. 491–496. [Google Scholar]
- Choi, H.; Kang, B.B.; Jung, B.-K.; Cho, K.-J. Exo-Wrist: A Soft Tendon-Driven Wrist-Wearable Robot With Active Anchor for Dart-Throwing Motion in Hemiplegic Patients. IEEE Robot. Autom. Lett. 2019, 4, 4499–4506. [Google Scholar] [CrossRef]
- Jeong, J.; Hyeon, K.; Han, J.; Park, C.H.; Ahn, S.-Y.; Bok, S.-K.; Kyung, K.-U. Wrist Assisting Soft Wearable Robot With Stretchable Coolant Vessel Integrated SMA Muscle. IEEE ASME Trans. Mechatron. 2022, 27, 1046–1058. [Google Scholar] [CrossRef]
- Lessard, S.; Pansodtee, P.; Robbins, A.; Baltaxe-Admony, L.B.; Trombadore, J.M.; Teodorescu, M.; Agogino, A.; Kurniawan, S. CRUX: A compliant robotic upper-extremity eXosuit for lightweight, portable, multi-joint muscular augmentation. In Proceedings of the International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1633–1638. [Google Scholar]
- Elor, A.; Lessard, S.; Teodorescu, M.; Kurniawan, S. Project Butterfly Synergizing Immersive Virtual Reality with Actuated Soft Exosuit for Upper-Extremity Rehabilitation. In Proceedings of the 26th IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 1448–1456. [Google Scholar]
- Abe, T.; Koizumi, S.; Nabae, H.; Endo, G.; Suzumori, K.; Sato, N.; Adachi, M.; Takamizawa, F. Fabrication of “18 Weave” Muscles and Their Application to Soft Power Support Suit for Upper Limbs Using Thin McKibben Muscle. IEEE Robot. Autom. Lett. 2019, 4, 2532–2538. [Google Scholar] [CrossRef]
- Kuschan, J.; Krüger, J. Fatigue recognition in overhead assembly based on a soft robotic exosuit for worker assistance. CIRP Ann. 2021, 70, 9–12. [Google Scholar] [CrossRef]
- Gaponov, I.; Popov, D.; Lee, S.J.; Ryu, J.-H. Auxilio: A portable cable-driven exosuit for upper extremity assistance. Int. J. Control. Autom. Syst. 2017, 15, 73–84. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Walsh, C.J. Soft exosuit for hip assistance. Robot. Auton. Syst. 2015, 73, 102–110. [Google Scholar] [CrossRef]
- Panizzolo, F.A.; Freisinger, G.M.; Karavas, N.; Eckert-Erdheim, A.M.; Siviy, C.; Long, A.; Zifchock, R.A.; LaFiandra, M.E.; Walsh, C.J. Metabolic cost adaptations during training with a soft exosuit assisting the hip joint. Sci. Rep. 2019, 9, 9779. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Quinlivan, B.T.; Deprey, L.A.; Revi, D.A.; Eckert-Erdheim, A.; Murphy, P.; Orzel, D.; Walsh, C.J. Reducing the energy cost of walking with low assistance levels through optimized hip flexion assistance from a soft exosuit. Sci. Rep. 2022, 12, 11004. [Google Scholar] [CrossRef] [PubMed]
- Malcolm, P.; Lee, S.; Crea, S.; Siviy, C.; Saucedo, F.; Galiana, I.; Panizzolo, F.A.; Holt, K.G.; Walsh, C.J. Varying negative work assistance at the ankle with a soft exosuit during loaded walking. J. Neuroeng. Rehabil. 2017, 14, 62. [Google Scholar] [CrossRef] [Green Version]
- Haufe, F.L.; Kober, A.M.; Wolf, P.; Riener, R.; Xiloyannis, M. Learning to walk with a wearable robot in 880 simple steps: A pilot study on motor adaptation. J. Neuroeng. Rehabil. 2021, 18, 157. [Google Scholar] [CrossRef]
- Schubert, T.; Wollesen, B.; Weidner, R. Development and Preliminary Evaluation of a Lower Body Exosuit to Support Ankle Dorsiflexion. Appl. Sci. 2021, 11, 5007. [Google Scholar] [CrossRef]
- Lee, H.D.; Park, H.; Hong, D.H.; Kang, T.H. Development of a Series Elastic Tendon Actuator (SETA) Based on Gait Analysis for a Knee Assistive Exosuit. Actuators 2022, 11, 166. [Google Scholar] [CrossRef]
- Di Natali, C.; Poliero, T.; Sposito, M.; Graf, E.; Bauer, C.; Pauli, C.; Bottenberg, E.; De Eyto, A.; O’Sullivan, L.; Hidalgo, A.F.; et al. Design and evaluation of a soft assistive lower limb exoskeleton. Robotica 2019, 37, 2014–2034. [Google Scholar] [CrossRef] [Green Version]
- Ding, Y.; Galiana, I.; Siviy, C.; Panizzolo, F.A.; Walsh, C. IMU-based iterative control for hip extension assistance with a soft exosuit. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Royal Inst Technol, Ctr Autonomous Syst, Stockholm, Sweden, 16–21 May 2016; pp. 3501–3508. [Google Scholar]
- Ding, Y.; Panizzolo, F.A.; Siviy, C.; Malcolm, P.; Galiana, I.; Holt, K.G.; Walsh, C.J. Effect of timing of hip extension assistance during loaded walking with a soft exosuit. J. Neuroeng. Rehabil. 2016, 13, 87. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, G.; Ding, Y.; Bujanda, I.G.; Karavas, N.; Zhou, Y.M.; Walsh, C.J. Improved assistive profile tracking of soft exosuits for walking and jogging with off-board actuation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1699–1706. [Google Scholar]
- Lee, G.; Kim, J.; Panizzolo, F.A.; Zhou, Y.M.; Baker, L.M.; Galiana, I.; Malcolm, P.; Walsh, C.J. Reducing the metabolic cost of running with a tethered soft exosuit. Sci. Robot. 2017, 2, eaan6708. [Google Scholar] [CrossRef] [PubMed]
- Jin, S.; Iwamoto, N.; Hashimoto, K.; Yamamoto, M. Experimental Evaluation of Energy Efficiency for a Soft Wearable Robotic Suit. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1192–1201. [Google Scholar] [CrossRef] [PubMed]
- John, S.W.; Murakami, K.; Komatsu, M.; Adachi, S. Cross-wire assist suit concept, for mobile and lightweight multiple degree of freedom hip assistance. In Proceedings of the International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 387–393. [Google Scholar]
- Haufe, F.L.; Wolf, P.; Riener, R.; Grimmer, M. Biomechanical effects of passive hip springs during walking. J. Biomech. 2020, 98, 109432. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Park, J.; Kim, J.; Park, S.; Lee, G. Reducing the energy cost of running using a lightweight, low-profile elastic exosuit. J. Neuroeng. Rehabil. 2021, 18, 129. [Google Scholar] [CrossRef]
- Chen, L.; Chen, C.; Wang, Z.; Ye, X.; Liu, Y.; Wu, X. A Novel Lightweight Wearable Soft Exosuit for Reducing the Metabolic Rate and Muscle Fatigue. Biosensors 2021, 11, 215. [Google Scholar] [CrossRef]
- Yang, H.D.; Cooper, M.; Eckert-Erdheim, A.; Orzel, D.; Walsh, C.J. A soft exosuit assisting hip abduction for knee adduction moment reduction during walking. IEEE Robot. Autom. Lett. 2022, 7, 7439–7446. [Google Scholar] [CrossRef]
- Tricomi, E.; Lotti, N.; Missiroli, F.; Zhang, X.; Xiloyannis, M.; Muller, T.; Crea, S.; Papp, E.; Krzywinski, J.; Vitiello, N.; et al. Underactuated Soft Hip Exosuit Based on Adaptive Oscillators to Assist Human Locomotion. IEEE Robot. Autom. Lett. 2022, 7, 936–943. [Google Scholar] [CrossRef]
- Jin, S.; Guo, S.; Kazunobu, H.; Xiong, X.; Yamamoto, M. Influence of a Soft Robotic Suit on Metabolic Cost in Long-Distance Level and Inclined Walking. Appl. Bionics Biomech. 2018, 2018, 9573951. [Google Scholar] [CrossRef]
- Murakami, K.; John, S.W.; Komatsu, M.; Adachi, S. External control of walking direction, using cross-wire mobile assist suit. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1046–1051. [Google Scholar]
- Zhao, S.; Yang, Y.; Gao, Y.; Zhang, Z.; Zheng, T.; Zhu, Y. Development of a soft knee exosuit with twisted string actuators for stair climbing assistance. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2541–2546. [Google Scholar]
- Park, E.J.; Akbas, T.; Eckert-Erdheim, A.; Sloot, L.H.; Nuckols, R.W.; Orzel, D.; Schumm, L.; Ellis, T.D.; Awad, L.N.; Walsh, C.J. A hinge-free, non-restrictive, lightweight tethered exosuit for knee extension assistance during walking. IEEE Trans. Med Robot. Bionics 2020, 2, 165–175. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.D.; Park, H.; Seongho, B.; Kang, T.H. Development of a soft exosuit system for walking assistance during stair ascent and descent. Int. J. Control. Autom. Syst. 2020, 18, 2678–2686. [Google Scholar] [CrossRef]
- Sridar, S.; Poddar, S.; Tong, Y.; Polygerinos, P.; Zhang, W. Towards untethered soft pneumatic exosuits using low-volume inflatable actuator composites and a portable pneumatic source. IEEE Robot. Autom. Lett. 2020, 5, 4062–4069. [Google Scholar] [CrossRef]
- Fang, J.; Yuan, J.; Wang, M.; Xiao, L.; Yang, J.; Lin, Z.; Xu, P.; Hou, L. Novel Accordion-Inspired Foldable Pneumatic Actuators for Knee Assistive Devices. Soft Robot. 2020, 7, 95–108. [Google Scholar] [CrossRef] [PubMed]
- Veale, A.J.; Staman, K.; van der Kooij, H. Soft, Wearable, and Pleated Pneumatic Interference Actuator Provides Knee Extension Torque for Sit-to-Stand. Soft Robot. 2021, 8, 28–43. [Google Scholar] [CrossRef]
- Sridar, S.; Nguyen, P.H.; Zhu, M.; Lam, Q.P.; Polygerinos, P. Development of a soft-inflatable exosuit for knee rehabilitation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3722–3727. [Google Scholar]
- Sridar, S.; Qiao, Z.; Muthukrishnan, N.; Zhang, W.; Polygerinos, P. A Soft-Inflatable Exosuit for Knee Rehabilitation: Assisting Swing Phase During Walking. Front. Robot. AI 2018, 5, 44. [Google Scholar] [CrossRef] [Green Version]
- Bae, J.; De Rossi, S.M.M.; O’Donnell, K.; Hendron, K.L.; Awad, L.N.; Dos Santos, T.R.T.; De Araujo, V.L.; Ding, Y.; Holt, K.G.; Ellis, T.D.; et al. A soft exosuit for patients with stroke Feasibility study with a mobile off-board actuation unit. In Proceedings of the 14th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR), Nanyang Technology University, Singapore, 11–14 August 2015; pp. 131–138. [Google Scholar]
- Bae, J.; Siviy, C.; Rouleau, M.; Nicolas, M.; O’Donnell, K.; Galiana, I.; Athanassiu, M.; Ryan, D.; Bibeau, C.; Sloot, L.; et al. A lightweight and efficient portable soft exosuit for paretic ankle assistance in walking after stroke. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2820–2827. [Google Scholar]
- Awad, L.N.; Bae, J.; O’Donnell, K.; De Rossi, S.M.M.; Hendron, K.; Sloot, L.H.; Kudzia, P.; Allen, S.; Holt, K.G.; Ellis, T.D.; et al. A soft robotic exosuit improves walking in patients after stroke. Sci. Transl. Med. 2017, 9, eaai9084. [Google Scholar] [CrossRef] [Green Version]
- Bae, J.; Awad, L.N.; Long, A.; O’Donnell, K.; Hendron, K.; Holt, K.G.; Ellis, T.D.; Walsh, C.J. Biomechanical mechanisms underlying exosuit-induced improvements in walking economy after stroke. J. Exp. Biol. 2018, 221, jeb168815. [Google Scholar] [CrossRef] [Green Version]
- Yandell, M.B.; Quinlivan, B.T.; Popov, D.; Walsh, C.; Zelik, K.E. Physical interface dynamics alter how robotic exosuits augment human movement: Implications for optimizing wearable assistive devices. J. Neuroeng. Rehabil. 2017, 14, 40. [Google Scholar] [CrossRef] [Green Version]
- Siviy, C.; Bae, J.; Baker, L.; Porciuncula, F.; Baker, T.; Ellis, T.D.; Awad, L.N.; Walsh, C.J. Offline assistance optimization of a soft exosuit for augmenting ankle power of stroke survivors during walking. IEEE Robot. Autom. Lett. 2020, 5, 828–835. [Google Scholar] [CrossRef]
- Nuckols, R.W.; Lee, S.; Swaminathan, K.; Orzel, D.; Howe, R.D.; Walsh, C.J. Individualization of exosuit assistance based on measured muscle dynamics during versatile walking. Sci. Robot. 2021, 6, eabj1362. [Google Scholar] [CrossRef] [PubMed]
- Awad, L.N.; Kudzia, P.; Revi, D.A.; Ellis, T.D.; Walsh, C.J. Walking faster and farther with a soft robotic exosuit: Implications for post-stroke gait assistance and rehabilitation. IEEE Open J. Eng. Med. Biol. 2020, 1, 108–115. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.Y.; Hohl, K.; Giffhorn, M.; Awad, L.N.; Walsh, C.J.; Jayaraman, A. Soft robotic exosuit augmented high intensity gait training on stroke survivors: A pilot study. J. Neuroeng. Rehabil. 2022, 19, 51. [Google Scholar] [CrossRef] [PubMed]
- Park, Y.L.; Chen, B.R.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.; Nagpal, R. Bio-inspired Active Soft Orthotic Device for Ankle Foot Pathologies. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4488–4495. [Google Scholar]
- Chung, J.; Heimgartner, R.; Neill, C.T.O.; Phipps, N.S.; Walsh, C.J. ExoBoot, a Soft Inflatable Robotic Boot to Assist Ankle During Walking: Design, Characterization and Preliminary Tests. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 509–516. [Google Scholar]
- Thalman, C.M.; Hsu, J.; Snyder, L.; Polygerinos, P. Design of a soft ankle-foot orthosis exosuit for foot drop assistance. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8436–8442. [Google Scholar]
- Yandell, M.B.; Tacca, J.R.; Zelik, K.E. Design of a Low Profile, Unpowered Ankle Exoskeleton That Fits Under Clothes: Overcoming Practical Barriers to Widespread Societal Adoption. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 712–723. [Google Scholar] [CrossRef]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinez-Villalpando, E.; Baumann, M.; Stirling, L.; Holt, K.; Wood, R.; Walsh, C. A Lightweight Soft Exosuit for Gait Assistance. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar]
- Quinlivan, B.T.; Lee, S.; Malcolm, P.; Rossi, D.M.; Grimmer, M.; Siviy, C.; Karavas, N.; Wagner, D.; Asbeck, A.; Galiana, I.; et al. Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Sci. Robot. 2017, 2, eaah4416. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, K.; Duarte, J.E.; Grimmer, M.; Sancho-Puchades, A.; Wei, H.; Easthope, C.S.; Riener, R. The Myosuit: Bi-articular Anti-gravity Exosuit That Reduces Hip Extensor Activity in Sitting Transfers. Front. Neurorobot. 2017, 11, 57. [Google Scholar] [CrossRef] [Green Version]
- Di Natali, C.; Sadeghi, A.; Mondini, A.; Bottenberg, E.; Hartigan, B.; De Eyto, A.; O’Sullivan, L.; Rocon, E.; Stadler, K.; Mazzolai, B.; et al. Pneumatic Quasi-Passive Actuation for Soft Assistive Lower Limbs Exoskeleton. Front. Neurorobot. 2020, 14, 31. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Dyer, R.J.; Larusson, A.F.; Walsh, C.J. Biologically-inspired soft exosuit. In Proceedings of the 13th IEEE International Conference on Rehabilitation Robotics (ICORR), Univ Washington Campus, Seattle, WA, USA, 24–26 June 2013. [Google Scholar]
- Asbeck, A.T.; De Rossi, S.M.M.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Galiana, I.; Wagner, D.; Walsh, C.J. Multi-joint soft exosuit for gait assistance. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6197–6204. [Google Scholar]
- Panizzolo, F.A.; Galiana, I.; Asbeck, A.T.; Siviy, C.; Schmidt, K.; Holt, K.G.; Walsh, C.J. A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. J. Neuroeng. Rehabil. 2016, 13, 43. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Crea, S.; Malcolm, P.; Galiana, I.; Asbeck, A.; Walsh, C. Controlling negative and positive power at the ankle with a soft exosuit. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Royal Institute Technology, Centre Autonomous Systems, Stockholm, Sweden, 16–21 May 2016; pp. 3509–3515. [Google Scholar]
- Grimmer, M.; Quinlivan, B.T.; Lee, S.; Malcolm, P.; Rossi, D.M.; Siviy, C.; Walsh, C.J. Comparison of the human-exosuit interaction using ankle moment and ankle positive power inspired walking assistance. J. Biomech. 2019, 83, 76–84. [Google Scholar] [CrossRef]
- Haufe, F.L.; Schmidt, K.; Duarte, J.E.; Wolf, P.; Riener, R.; Xiloyannis, M. Activity-based training with the Myosuit: A safety and feasibility study across diverse gait disorders. J. Neuroeng. Rehabil. 2020, 17, 135. [Google Scholar] [CrossRef] [PubMed]
- Graf, E.S.; Bauer, C.M.; Power, V.; de Eyto, A.; Bottenberg, E.; Poliero, T.; Sposito, M.; Scherly, D.; Henke, R.; Pauli, C.; et al. Basic functionality of a prototype wearable assistive soft exoskeleton for people with gait impairments. In Proceedings of the 11th PErvasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 26–29 June 2018; pp. 202–207. [Google Scholar]
- Lamers, E.P.; Yang, A.J.; Zelik, K.E. Feasibility of a Biomechanically-Assistive Garment to Reduce Low Back Loading During Leaning and Lifting. IEEE Trans. Biomed. Eng. 2018, 65, 1674–1680. [Google Scholar] [CrossRef] [PubMed]
- Lamers, E.P.; Zelik, K.E. Design, modeling, and demonstration of a new dual-mode back-assist exosuit with extension mechanism. Wearable Technol. 2021, 2, e1. [Google Scholar] [CrossRef]
- Gorsic, M.; Song, Y.; Dai, B.; Novak, D. Evaluation of the HeroWear Apex back-assist exosuit during multiple brief tasks. J. Biomech. 2021, 126, 110620. [Google Scholar] [CrossRef]
- Gorsic, M.; Song, Y.; Dai, B.; Novak, V.D. Short-term effects of the Auxivo LiftSuit during lifting and static leaning. Appl. Ergon. 2022, 102, 103765. [Google Scholar] [CrossRef]
- Bhardwaj, S.; Shinde, A.B.; Singh, R.; Vashista, V. Passive Exosuit Emulator for Material Handling Applications. IEEE Robot. Autom. Lett. 2022, 7, 7605–7611. [Google Scholar] [CrossRef]
- Inose, H.; Mohri, S.; Yamada, Y.; Nakamura, T.; Yokoyama, K.; Kikutani, I. Development of a Lightweight Power-assist Suit Using Pneumatic Artificial Muscles and Balloon-amplification Mechanism. In Proceedings of the 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phukhet, Thailand, 13–15 November 2016. [Google Scholar]
- Inose, H.; Mohri, S.; Arakawa, H.; Okui, M.; Koide, K.; Yamada, Y.; Kikutani, I.; Nakamura, T. Semi-endoskeleton-type waist assist AB-wear suit equipped with compressive force reduction mechanism. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6014–6019. [Google Scholar]
- Govin, D.; Saenz, L.; Athanasaki, G.; Snyder, L.; Polygerinos, P. Design and Development of a Soft Robotic Back Orthosis. In Proceedings of the 2018 Design of Medical Devices Conference, Minneapolis, MN, USA, 9–12 April 2018. [Google Scholar]
- Yang, X.L.; Huang, Z.H.; Hu, H.; Yu, S.Y.; Zhang, S.N.; Zhou, X.L.; Carriero, A.; Yue, G.; Su, H. Spine-Inspired Continuum Soft Exoskeleton for Stoop Lifting Assistance. IEEE Robot. Autom. Lett. 2019, 4, 4547–4554. [Google Scholar] [CrossRef] [Green Version]
- Li, J.M.; Molinaro, D.D.; King, A.S.; Mazumdar, A.; Young, A.J. Design and Validation of a Cable-Driven Asymmetric Back Exosuit. IEEE Trans. Robot. 2022, 38, 1489–1502. [Google Scholar] [CrossRef]
- Yao, Z.J.; Linnenberg, C.; Weidner, R.; Wulfsberg, J. Development of A Soft Power Suit for Lower Back Assistance. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5103–5109. [Google Scholar]
- Kermavnar, T.; O’Sullivan, K.J.; de Eyto, A.; O’Sullivan, L.W. The effect of simulated circumferential soft exoskeleton compression at the knee on discomfort and pain. Ergonomics 2020, 63, 618–628. [Google Scholar] [CrossRef]
- Bartenbach, V.; Schmidt, K.; Naef, M.; Wyss, D.; Riener, R. Concept of a soft exosuit for the support of leg function in rehabilitation. In Proceedings of the 14th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR), Nanyang Technology University, Singapore, 11–14 August 2015; pp. 125–130. [Google Scholar]
- Palli, G.; Natale, C.; May, C.; Melchiorri, C.; Wurtz, T. Modeling and Control of the Twisted String Actuation System. IEEE-ASME Trans. Mechatron. 2013, 18, 664–673. [Google Scholar] [CrossRef]
- Gaponov, I.; Popov, D.; Ryu, J.H. Twisted String Actuation Systems: A Study of the Mathematical Model and a Comparison of Twisted Strings. IEEE ASME Trans. Mechatron. 2014, 19, 1331–1342. [Google Scholar] [CrossRef]
- Jani, J.M.; Leary, M.; Subic, A. Designing shape memory alloy linear actuators: A review. J. Intell. Mater. Syst. Struct. 2016, 28, 1699–1718. [Google Scholar] [CrossRef]
- Poliero, T.; Di Natali, C.; Sposito, M.; Ortiz, J.; Graf, E.; Pauli, C.; Bottenberg, E.; De Eyto, A.; Caldwell, D.G. Soft Wearable Device for Lower Limb Assistance: Assessment of an Optimized Energy Efficient Actuation Prototype. In Proceedings of the 1st IEEE-RAS International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 559–564. [Google Scholar]
- Lessard, S.; Pansodtee, P.; Robbins, A.; Trombadore, J.M.; Kurniawan, S.; Teodorescu, M. A Soft Exosuit for Flexible Upper-Extremity Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1604–1617. [Google Scholar] [CrossRef] [PubMed]
- Irshaidat, M.; Soufian, M.; Al-Ibadi, A.; Nefti-Meziani, S. A Novel Elbow Pneumatic Muscle Actuator for Exoskeleton Arm in Post-Stroke Rehabilitation. In Proceedings of the 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 630–635. [Google Scholar]
- Wilkening, A.; Stoppler, H.; Ivlev, O. Adaptive Assistive Control of a Soft Elbow Trainer with Self-Alignment using Pneumatic Bending Joint. In Proceedings of the 14th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR), Nanyang Technology University, Singapore, 11–14 August 2015; pp. 729–734. [Google Scholar]
- Wu, Q.; Chen, B.; Wu, H. Neural-network-enhanced torque estimation control of a soft wearable exoskeleton for elbow assistance. Mechatronics 2019, 63, 102279. [Google Scholar] [CrossRef]
- Missiroli, F.; Lotti, N.; Xiloyannis, M.; Sloot, L.H.; Riener, R.; Masia, L. Relationship Between Muscular Activity and Assistance Magnitude for a Myoelectric Model Based Controlled Exosuit. Front. Robot. AI 2020, 7, 595844. [Google Scholar] [CrossRef] [PubMed]
- Lotti, N.; Xiloyannis, M.; Missiroli, F.; Bokranz, C.; Chiaradia, D.; Frisoli, A.; Riener, R.; Masia, L. Myoelectric or Force Control? A Comparative Study on a Soft Arm Exosuit. IEEE Trans. Robot. 2022, 38, 1363–1379. [Google Scholar] [CrossRef]
- Ding, Y.; Galiana, I.; Asbeck, A.; Quinlivan, B.; De Rossi, S.M.M.; Walsh, C. Multi-joint actuation platform for lower extremity soft exosuits. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1327–1334. [Google Scholar]
- Ding, Y.; Kim, M.; Kuindersma, S.; Walsh, C.J. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci. Robot. 2018, 3, eaar5438. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Xiong, A. Advances and Disturbances in sEMG-Based Intentions and Movements Recognition: A Review. IEEE Sens. J. 2021, 21, 13019–13028. [Google Scholar] [CrossRef]
- Porciuncula, F.; Baker, T.C.; Revi, D.A.; Bae, J.; Sloutsky, R.; Ellis, T.D.; Walsh, C.J.; Awad, L.N. Targeting Paretic Propulsion and Walking Speed With a Soft Robotic Exosuit: A Consideration-of-Concept Trial. Front. Neurorobot. 2021, 15, 689577. [Google Scholar] [CrossRef]
- Crowell, H.P.; Park, J.-H.; Haynes, C.A.; Neugebauer, J.M.; Boynton, A.C. Design, Evaluation, and Research Challenges Relevant to Exoskeletons and Exosuits: A 26-Year Perspective From the U.S. Army Research Laboratory. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 199–212. [Google Scholar] [CrossRef]
- Di Natali, C.; Chini, G.; Totaro, M.; Lora-Millán, J.S.; Rocon, E.; Beccai, L.; Caldwell, D.G.; Visentin, G.; Ortiz, J. Quasi-Passive Resistive Exosuit for Space Activities: Proof of Concept. Appl. Sci. 2021, 11, 3576. [Google Scholar] [CrossRef]
- Porter, A.P.; Marchesini, B.; Potryasilova, I.; Rossetto, E.; Newman, D.J. Soft Exoskeleton Knee Prototype for Advanced Space Suits and Planetary Exploration. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar]
- Zelik, K.E.; Nurse, C.A.; Schall, M.C., Jr.; Sesek, R.F.; Marino, M.C.; Gallagher, S. An ergonomic assessment tool for evaluating the effect of back exoskeletons on injury risk. Appl. Ergon. 2022, 99, 103619. [Google Scholar] [CrossRef] [PubMed]
Figure 2.
Exosuits for lower limbs: (a–d) Systems proposed by Wyss Institute for Biologically Inspired Engineering of Harvard University [49,50,51,52]; (e) Myosuit presented in [53]; (f) A cable-driven wearable device to support the ankle [54]; (g) Device with a series of elastic tendon actuators (SETA) to support stair ascent and descent [55]; (h) The Beta 1 prototype of XoSoft [56].
Figure 2.
Exosuits for lower limbs: (a–d) Systems proposed by Wyss Institute for Biologically Inspired Engineering of Harvard University [49,50,51,52]; (e) Myosuit presented in [53]; (f) A cable-driven wearable device to support the ankle [54]; (g) Device with a series of elastic tendon actuators (SETA) to support stair ascent and descent [55]; (h) The Beta 1 prototype of XoSoft [56].

Figure 3.
Back-assist exosuits: (a) A low-profile and dual-mode prototype using extension mechanism [104]; (b) HeroWear Apex [105].

Table 6.
Several representative exosuits for knee assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| Hitexosuit [70] | 2019 | Extension | Twisted string actuator | IMU | Control based on gait period detection | Climbing stairs |
| Park et al. [71] | 2020 | Extension | Cable-driven module | IMU, load cell | Gait event detection, hyperextension protection, admittance controller | Healthcare |
| Lee et al. [72] | 2020 | Flexion/extension | Cable-driven module | IMU, insole sensor | Admittance controller | Climbing stairs |
| Sridar et al. [73] | 2020 | Extension | Pneumatic actuator | Pressure sensor, insole sensor | - | Physical enhancement |
| Fang et al. [74] | 2020 | Flexion/extension | Pneumatic actuator | Pressure sensor | On/off control algorithm | Healthcare |
| SLAK [75] | 2021 | Extension | Pneumatic actuator | Pressure sensor | Closed-loop control | Assistance for sit-to-stand |
Table 8.
Lower extremity exosuits for multi-joint assistance.
| Exosuit/Study | Year | Movements | Actuation | Sensors | Control | Function |
|---|---|---|---|---|---|---|
| Wehner et al. [91] | 2013 | Assistance for hip, knee and ankle | Pneumatic actuator | Footswitch, pressure gauge | Timing based control scheme | Physical enhancement |
| Quinlivan et al. [92] | 2017 | Hip flexion, ankle plantarflexion | Cable-driven module, passive element | Load cell, gyroscope | Biologically inspired control | Physical enhancement |
| Myosuit [93] | 2017 | Flexion/extension for hip and knee | Cable-driven module, passive actuator | Load cell, encoder, IMU | Posture based anti-gravity control | Physical enhancement |
| Lee et al. [1] | 2018 | Hip flexion and extension, ankle plantarflexion | Cable-driven module, passive element | Load cell, IMU | Force-based position control | Military application |
| Beta 1 prototype of XoSoft [56] | 2019 | Flexion of hip and knee | Quasi-passive actuation | Shoe insole | Control based on gait segmentation | Healthcare |
| Gamma prototype of XoSoft [94] | 2020 | Assistance for hip, knee and ankle | Pneumatic quasi-passive actuation | Insole sensor, IMUs, pressure sensor | Gait cycle segmentation, finite state machine | Healthcare |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Shi, Y.; Dong, W.; Lin, W.; Gao, Y. Soft Wearable Robots: Development Status and Technical Challenges. Sensors 2022, 22, 7584. https://doi.org/10.3390/s22197584
AMA Style
Shi Y, Dong W, Lin W, Gao Y. Soft Wearable Robots: Development Status and Technical Challenges. Sensors. 2022; 22(19):7584. https://doi.org/10.3390/s22197584
Chicago/Turabian StyleShi, Yongjun, Wei Dong, Weiqi Lin, and Yongzhuo Gao. 2022. "Soft Wearable Robots: Development Status and Technical Challenges" Sensors 22, no. 19: 7584. https://doi.org/10.3390/s22197584
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.