

Internet of Underwater Things: A Survey on Simulation Tools and 5G-Based Underwater Networks

1
Department of Computer and Information Security, Sejong University, Seoul 05006, Republic of Korea
2
Research & Education Group of AI Convergence, Pukyong National University, Busan 48513, Republic of Korea
3
Vulnerability Management Team, World Food Programme Rome, Department of Information Technology, 77835 Latium, Italy
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Electronics 2024, 13(3), 474; https://doi.org/10.3390/electronics13030474
Submission received: 24 December 2023
/
Revised: 14 January 2024
/
Accepted: 19 January 2024
/
Published: 23 January 2024
(This article belongs to the Special Issue Artificial Intelligence Empowered Internet of Things)
Abstract
:The term “Internet of Underwater Things (IoUT)” refers to a network of intelligent interconnected underwater devices designed to monitor various underwater activities. The IoUT allows for a network of autonomous underwater vehicles (AUVs) to communicate with each other, sense their surroundings, collect data, and transmit them to control centers on the surface at typical Internet speeds. These data serve as a valuable resource for various tasks, including conducting crash surveys, discovering shipwrecks, detecting early signs of tsunamis, monitoring animal health, obtaining real-time aquatic information, and conducting archaeological expeditions. This paper introduces an additional set of alternative simulation tools for underwater networks. We categorize these tools into open-source and licensed simulator options and recommend that students consider using open-source simulators for monitoring underwater networks. There has not been widespread deployment or extensive research on underwater 5G-based networks. However, simulation tools provide some general insights into the challenges and potential issues associated with evaluating such networks, based on the characteristics of underwater communication and 5G, by surveying 5G-based underwater networks and 5G key aspects addressed by the research community in underwater network systems. Through an extensive review of the literature, we discuss the architecture of both Internet of Underwater application-assisted AUVs and Internet of Underwater Things communications in the 5G-based system.
1. Introduction
Recently, there has been a growing presence of interconnected physical objects, giving rise to the Internet of Things (IoT) concept. The IoT has significantly transformed various aspects of our lives, including healthcare, energy management, industrial processes, agriculture, livestock, infrastructure, and technology. This interconnected network of devices has the potential to link objects across the globe, enhancing our ability to interact with our surrounding environment for a more enriched living experience [1]. The IoT has primarily focused on and undergone extensive research in terrestrial and urban network environments. This substantial groundwork has laid a robust foundation for the rapid growth of industrial IoT, which is progressing remarkably as of the present moment [2]. Nonetheless, 72% of the Earth’s total surface area, which spans 509 million square kilometers, is occupied by water. Scientists grew interested in underwater exploration, which has driven technological advancements toward creating a “smart ocean” or the Internet of Underwater Things (IoUT). This concept extends the IoT designed explicitly for underwater environments.
Domingo et al. [3] the introduced the fundamental idea of IoUT. The IoUT consists of smart objects interconnected to monitor unexplored oceans. These interconnected intelligent underwater devices use built-in sensors and Autonomous Underwater Vehicles (AUVs) to identify, analyze, and react to environmental conditions. These underwater objects communicate with the external world via surface elements like surface buoys and surface stations [4].
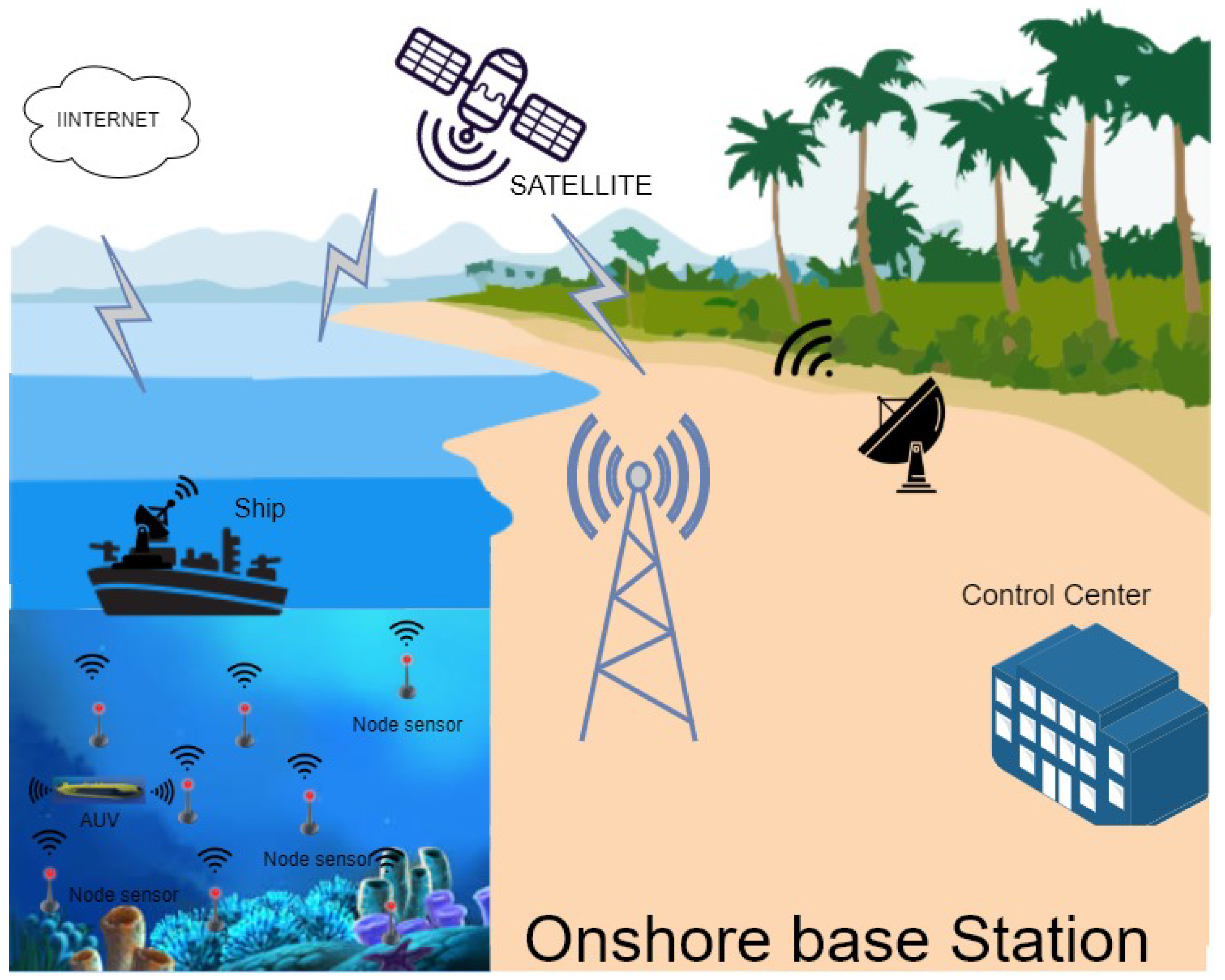
An IoUT architecture, shown in Figure 1, includes underwater sensor nodes, surface nodes, AUVs, surface base stations (BS), surface ships, and surface elements, including seashore base stations (seashore BS) and seashore control centers, which constitute the components of this network. Initially, the underwater sensor nodes gather a substantial volume of valuable ocean data. Subsequently, these data are enhanced through data fusion and intelligent processing when underwater nodes and AUVs transmit them. Underwater nodes and AUVs employ various underwater communication technologies to send these data to surface modules responsible for computing and transmission. Critical underwater data undergo analysis by edge servers located on the surface, specifically designed for underwater network applications and marine activities, such as exploration platforms and deep-sea exploration. Radio communication links transmit the remaining data to Internet cloud servers or seashore control centers. The seashore control centers use the information collected from the ocean, as well as data from Internet cloud servers, to make a series of intelligent decisions supporting human activities in the ocean. Additionally, underwater wireless sensor networks (UWSNs), a crucial component of the IoUT, play a significant role in providing ocean-related information and enhancing the capability of users to monitor and predict events in underwater environments [5].
There has yet to be widespread deployment or extensive research on underwater 5G-based networks. However, simulation tools provide some general insights into the challenges and potential issues associated with evaluating such networks based on the characteristics of underwater communication and 5G technology. General insights for surveying simulation tools and the idea of new underwater simulation tools related to 5G-based networks are underwater channel characteristics, propagation loss, and signal attenuation, interference and noise, energy efficiency, and underwater sensor integration. Underwater channels exhibit high variability due to salinity, temperature, and turbulence. Evaluating the performance of 5G-based networks in such dynamic environments can be challenging. Propagation loss and signal attenuation are identified in underwater communication. 5G networks must be evaluated for their ability to handle these challenges and provide reliable communication links. Underwater environments are susceptible to interference and noise from natural sources, such as marine life and other underwater activities. Evaluations should consider the impact of interference on the 5G network’s performance. Energy efficiency is critical for underwater devices, which may rely on limited power sources. Evaluations should assess the energy efficiency of 5G-based devices and infrastructure. Many underwater networks involve the integration of sensors for various purposes, such as environmental monitoring or surveillance. Evaluations should consider the seamless integration of these sensors with the 5G infrastructure.
Ensuring that underwater 5G networks comply with relevant standards and are compatible with existing communication systems is vital for successful deployment and interoperability. To address these challenges, researchers and engineers must develop specific evaluation methodologies and testbeds tailored to the underwater environment. These may include simulation tools, underwater test facilities, and real-world deployment scenarios for thorough performance assessment. More specific challenges and evaluation criteria may emerge as research in this area progresses.
In this paper, we focus is on shedding light on simulation tools designed to analyze and create underwater communication networks and protocols. We also recommend freely available simulation and emulation tools suitable for educational use with students. Through an extensive review of the literature, we discuss the architecture of both Internet of Underwater application-assisted AUVs and Internet of Underwater Things communications in the 5G-based system.
The paper is structured and organized as follows: a background on the key design of IoUTs, UWSNS, and related work is presented in Section 2. Section 3 introduces architectures of underwater application-assisted underwater wireless communications and AUVs. Section 4 describes underwater networks in integration with 5G systems. A comprehensive presentation of these 5G-based underwater networks and related simulations is summarized. Section 5 is dedicated to challenges and future work. Section 6 is dedicated to the conclusion.
2. Background
2.1. Architecture of IoUTs and Its Major Underwater Networks
In this section, we introduce the functional architecture of IoUTs. After, we outline the principal underwater networks within the IoUTs architecture. We explore key concepts of IoUTs and draw insights from previous surveys to comprehensively address concepts, routing protocols, and wireless communications between underwater nodes.
2.1.1. Architectural Components of IoUTs
Underwater sensors and AUVs work together to thoroughly examine underwater marine infrastructure and to monitor and identify oil spills in pipeline systems. These sensors can be positioned both within and outside the pipelines. In IoUT, the majority of communications rely on acoustic connections. While acoustic waves have gained broad acceptance for underwater communication within the scientific community as a physical transmission, the extensive propagation delays associated with acoustic waves and the elevated bit error rates in the underwater acoustic channel create obstacles to effective communication. The distinctive attributes of the underwater acoustic communication channel, as discussed by Domingo et al. [3], necessitate creating security measures that are both effective and dependable for the IoUT. Safeguarded against denial-of-service (DoS) attacks secures the communication between sensors and AUVs. These attacks can disrupt the IoUT’s regular operation and timeliness.
Domimgo et al. [3] examined the components of IoUTs in their review as illustrated by Figure 2. We provide a summary of these components as follows:
- Perception Layer: This layer serves to recognize objects and collect data, primarily comprising underwater sensors; underwater vehicles; surface stations (receiving devices); monitoring stations (such as tablet PCs and smartphones); data storage tags; acoustic, radio, and PIT tags; and hydrophones/receivers/tag readers.
- Network Layer: This layer comprises a unified network that includes privately owned wired and wireless networks, the Internet, network management systems, cloud computing platforms, and more. Its role is to handle the processing and transmission of data acquired from the perception layer. Regarding network topology, Domimgo et al. [3] emphasize the importance of considering energy consumption, particularly in scenarios where long-term, non-time-critical monitoring is needed. Such monitoring may require nodes to operate for extended periods, years, or even decades without possibly replacing or recharging batteries. Even when secondary energy sources like energy harvesting supplement batteries, the issue of eventually replacing depleted batteries persists.
- Application Layer: This layer encompasses a range of intelligent solutions that leverage IoUT technology to meet user requirements.Domimgo et al. [3] suggest a solution that lies in utilizing harvested energy as the primary and sole energy source, replacing batteries with supercapacitors for storing the harvested energy. Supercapacitors can be recharged numerous times and possess a higher energy density, making them a more sustainable choice. Combining low-power electronics, energy-harvesting devices, and supercapacitors makes it possible to create IoUT devices that rely exclusively on energy harvesting for operation. Robust underwater energy harvesting techniques capable of powering IoUT devices are essential to achieve this.
2.1.2. Major Underwater Networks in IoUTs
The model of the underwater network is shown in Figure 3. Kao et al. [6], in their review, discussed underwater networks as follows:
- In the context of the IoUT, UWSNs have been recognized as promising network systems. UWSNs comprise several components. The primary element is underwater sensors. Within UWSNs, the varying water depth allows placing sensor nodes with acoustic modems. The sensor node can sense various environmental data, including information related to water quality, pressure, temperature, metals, chemicals, and biological elements. Additionally, they can relay and forward these data as necessary. Moreover, environmental noises in UWSNs consist of various complex factors, including turbulence, shipping activities, waves, and more. Consequently, the issue of reliability is among the most formidable challenges within the domain of IoUT.In UWSNs, link reliability is typically unstable and tends to be low. Link reliability defines the successful delivery ratio as the proportion of data successfully received by a receiver compared to the total data sent by the sender within a pair of sensor nodes. In UWSNs, the effective delivery rate influences transmission loss. It represents the cumulative decrease in the energy intensity of a wave when it propagates from its source (e.g., from a sensor node in this scenario), and the presence of environmental noises. Since absorption is a factor, transmission loss poses a notable challenge in underwater environments.In assessing link reliability within the context of IoUT, the channel models are designed for underwater environments. These models serve the purpose of computing the successful delivery ratio of each link in UWSNs. The successful delivery ratio is akin to link reliability. Therefore, it is a crucial metric for crafting dependable communication protocols in IoUT.
- In Terrestrial Wireless Sensor Networks (TWSNs), communication is often facilitated through radio waves. However, in the case of UWSNs, acoustic communication is the preferred method over radio communication. This choice is primarily because radio signals get absorbed rapidly in water. Unfortunately, acoustic waves possess significantly different properties than radio waves, so many communication protocols designed for TWSNs cannot be directly applied to UWSNs. Consequently, the nature of the transmission medium represents a major challenge in the context of the IoUT.In contrast to radio communications in TWSNs, acoustic communications in UWSNs operate within a limited bandwidth. This constrained bandwidth results in relatively low transmission rates in UWSNs, typically around 10 kbps. Consequently, the efficient utilization of available bandwidth is a critical concern in IoUT.The underwater channel models encompass various elements, which we categorize into two primary segments. The initial part explores the relationship between transmitter power and the signal-to-noise ratio (SNR). Subsequently, the design refers to the correlation between SNR and the successful delivery ratio in the second part. In essence, these channel models offer researchers a methodical approach to determining the reliability, denoted as the successful delivery ratio, of each link in IoUT.The authors introduce a power-efficient Time-Division Multiple Access (TDMA) protocol for local transmissions between sensors and sinks. The protocol design ensures robustness and adaptability, particularly when the network changes.
2.1.3. Design Key Concepts on IoUTs
Ponraj et al. [8] examined the design aspects of IoUTs. In their review, they discuss four concepts as follows:
- Context: This pertains to the practical use in the physical world. The channel model is highly contingent on specific applications and environmental variables, such as water depth, water density, water temperature, water salinity, water chemistry, sound characteristics, and water humidity. These parameters exhibit variations from one ocean or sea to another and from an ocean to a river.
- Data transfer: Underwater networks facilitate data transfer by utilizing light and acoustic waves. Electromagnetic waves tend to undergo significant attenuation in water, especially at higher frequencies, necessitating substantial transmission power and more advanced receiving equipment. While optical waves achieve high data rate communication, they are easily absorbed and dispersed in water. As a result, acoustic waves emerge as the preferred medium for data transmission in underwater communication.
- MAC protocol: The underwater setting has high dynamism and unpredictability. Sensor nodes are deployed at different depths and face diverse environmental conditions, making resource allocation critical for dependable and efficient operation. Therefore, considering these distinct resource allocation requirements, the MAC protocol for UWSN should be responsive and precise as this greatly influences the overall efficiency of communication in underwater environments. Enhancements in MAC protocols for acoustic UWSNs should involve incorporating modem capabilities and wake-up systems to minimize power consumption. Synchronization and constraint management are vital prerequisites for effective MAC Protocols.
- Network protocol: Transferring network layer protocols developed for terrestrial wireless sensor networks directly to underwater environments is not feasible due to the distinctive challenges underwater conditions pose. These challenges include restricted bandwidth, significant propagation delays, limited energy resources for sensor nodes, and substantial signal attenuation. Therefore, meticulous network layer protocol design addresses these limitations inherent to underwater environments while ensuring reliable communication with the necessary quality of service. The protocols initially designed for land-based sensor networks are not directly applicable to underwater communication. UWSNs possess unique characteristics, necessitating novel research at nearly every layer of the protocol suite.
2.2. 5G Based Topology for Underwater Networks
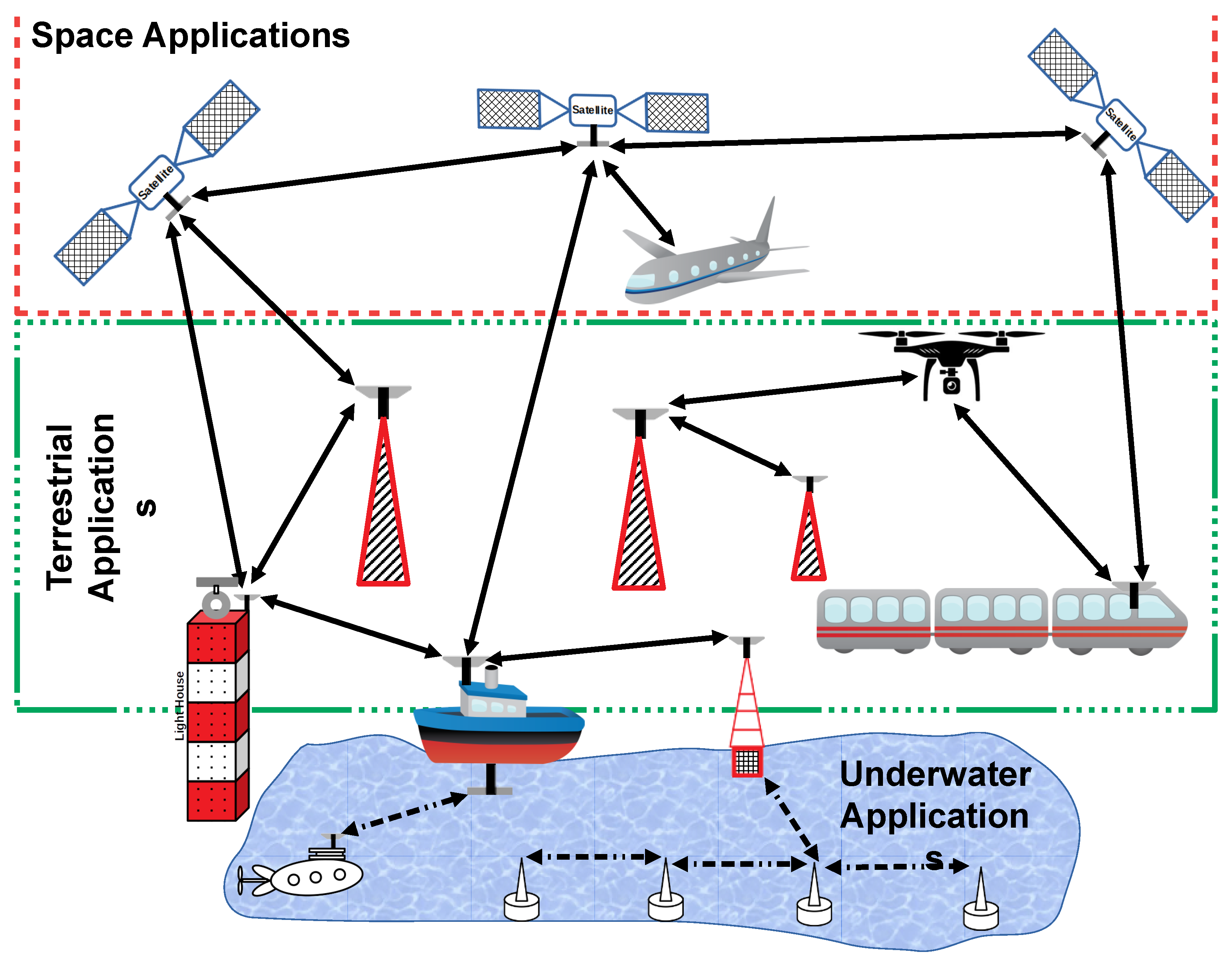
In terrestrial mobile communication, the optical fiber is the backbone of the mobile communication network, and cell structures are employed on the mobile access side [9]. In the context of 5G networks, radio over fiber (RoF) technology is employed to achieve high transmission performance between a central station and multiple base stations. This technology also reduces the cellular diameter, for instance, the 5G network’s cellular diameter is tens of or several meters. Due to the limited bandwidth and diminished performance over extended distances, underwater acoustic communication is not well-suited for underwater information networks. Likewise, underwater optical wireless communication is constrained to several hundred meters due to substantial water attenuation. Consequently, neither of these methods can independently achieve long-distance, high-bandwidth, or high-performance information exchange or transmission. Conversely, a combination of underwater optical fiber, functioning as a long-distance, high-speed backbone network, along with the utilization of wireless light and underwater acoustic waves within individual cells, presents a viable approachthat presents an integrated architecture for underwater communication networks, encompassing acoustic, wireless-optical, and fiber-optic cellular components as shown in Figure 4. The optical fibers form a backbone network connecting near-shore data centers and underwater mobile base stations, which may encompass underwater space stations and data centers. In addition to connecting to submerged networks through AUVs and underwater cellular technology, surface ships and communication buoys are also linked to space satellites and data centers of near-shore base stations through radio frequency (RF) links. With wireless blue-green light and underwater acoustic waves, the underwater cellular network can collect, transmit, and exchange data, establishing an underwater Internet of Things.
The implementation of 5G technology in UWSNs signifies a significant advancement in underwater communication capabilities. This integration brings about enhanced data rates, lower latency, and improved overall performance in underwater sensor networks. Traditional underwater communication faces challenges due to the unique characteristics of the underwater environment, such as signal attenuation, limited bandwidth, and high latency. The introduction of 5G technology aims to overcome these challenges.
2.3. Simulations Tools in Underwater Network Systems
We focus on shedding light on simulation tools designed to analyze and create underwater communication networks and protocols. In this Table 1, we provided a list of simulators and emulators for underwater network research, although it was not an exhaustive compilation. Additional simulator tools are available on IoUT, such as SIMBA, STOAT, DWSIM, VMGSIM, and COMSOL.
Simulation tools designed for educational use should possess specific features that enhance the learning experience and provide a platform for effective teaching and training. Here are some key features that make simulation tools suitable for educational purposes:
- Accuracy: the simulation should closely replicate real-world scenarios, providing an authentic learning experience.
- Graphics and visualization: high-quality graphics and visual representation contribute to a more immersive and engaging learning environment.
- Scenario creation: instructors should be able to create and customize scenarios to align with specific learning objectives.
- Parameter adjustments: the tool should allow for adjusting parameters to create diverse situations, enabling learners to explore various possibilities.
In the next Section 4, we discussed research work oriented 5G-based networks and different simulations tools for evaluation and performance. The aim is to address the lack of simulation tools that seamlessly integrate underwater sensors and communication networks with the 5G infrastructure. However, it is noteworthy that open-source options are highly recommended, with a particular emphasis on MatLab, which benefits from extensive online documentation. This recommendation is precious for academic purposes, especially for student researchers.
Simulating underwater communication in 5G networks is crucial for designing, testing, and optimizing communication protocols and technologies. Several simulation tools are available for this purpose, enabling researchers and engineers to evaluate the performance of underwater communication systems. Here are some simulation tools commonly used for underwater applications in 5G networks:
- NS-3 (Network Simulator 3):NS-3 is a widely used open-source discrete-event network simulator. It supports the simulation of various networking protocols and is extensible for underwater communication simulations. Martin et al. [11] and Qadar et al. [12] develop custom models or use existing models for underwater acoustic communication.
- GODUNOV (GPU Oceanic and Underwater Network Simulator):GODUNOV is a GPU-accelerated network simulator specifically designed for underwater networks. It provides support for realistic underwater channel models and is capable of simulating a large number of underwater nodes. Rômulo et al. [13] concluded that the simulation framework parallelized using GPUs provided efficient and scalable simulations.
- OMNeT++ (Objective Modular Network Testbed in C++) [10]:OMNeT++ is a modular, component-based simulation framework for network simulations. Shin et al. [14] introduced analysis procedures for various underwater environments that support the development of custom models for underwater communication and can be extended with additional modules and libraries.
- MatLab/Simulink:MatLab is a widely used platform for simulation and modeling, and Simulink is its graphical simulation environment. Zhang et al. [15] designed and implemented a modular UUVs simulation platform. It has various toolboxes and add-ons in MatLab that can be employed for simulating underwater communication scenarios.
- Acoustic Toolbox (ATB):The ATB is a MatLab-based toolbox designed for underwater acoustic simulations. Sehgal et al. [16] introduced introduced the AquaTools simulation toolkit overview. It provides functionalities for modeling the acoustic channel, including sound speed profiles, ray tracing, and signal processing.
- Riverbed Modeler:Riverbed Modeler [17] is a commercial network simulation tool that supports the modeling of various types of networks, including underwater networks. It offers a user-friendly interface and supports the simulation of network protocols and applications.
- Underwater Acoustic Network Simulator (UANS):UANS [18] is a tool developed to simulate underwater acoustic networks. Su et al. [18] improved the transmission efficiency of UWANs by evaluating additional Bundle Protocols and algorithms in delay/disruption tolerant networks (DTNs). It allows users to model various parameters of underwater communication, including node mobility and acoustic channel conditions. When using these tools, it is essential to consider the requirements and characteristics of underwater communication, such as acoustic propagation, signal attenuation, and node mobility. Additionally, researchers may need to adapt existing models or develop new ones to represent the underwater communication environment in 5G networks accurately.
- Qualnet Network Simulation Software [19] is an adaptable simulation tool designed to emulate real-life networks. Widely employed in commercial and military contexts, as well as by global governments and educational institutions, it serves diverse purposes.
- World Ocean Simulation System (WOSS) [20] is a C++-based open-source simulation tool. It facilitates the incorporation of established underwater channel simulators such as NS-2 and NS-3. Users can input environmental data, and the system generates a channel realization as the output.
- Aqua-Sim [11] is an open-source underwater simulator that boasts extensive protocol and feature support. It enables the simulation of acoustic signals and packet collisions in UWSNs and offers three-dimensional deployment capabilities. Widely favored by researchers, Aqua-Sim is built upon the renowned NS-2 (Network Simulator) tool, also crafted in C++, making it highly suitable for UWSNs. Its integration with a visual tool and its capacity to monitor node placement, movement, and packet flow enhance its capability.
- AUVNetSim [21] serves as a simulation library designed to assess acoustic networking algorithms. Developed in Python, it heavily utilizes the SimPy discrete event simulation package. This tool is appealing to both end users and developers. Users interested in conducting multiple simulations using existing resources can effortlessly adjust various system parameters without engaging with Python code directly. Similarly, developers aiming to integrate a new MAC protocol can seamlessly leverage the existing framework.
- DESERT Underwater [22] is a comprehensive collection of publicly available C++ libraries that enhance the NS-MIRACLE simulator. This extension facilitates the development and implementation of underwater network protocols.
- Monte Carlo [23] simulation is a computational technique that uses random sampling to model and analyze complex systems or processes. It involves running multiple iterations or simulations using random input values to assess possible outcomes’ ranges and probabilities. This simulation method generates random numbers to represent uncertain factors or variables in a model. The simulation is then performed numerous times. For each time with different sets of random values, Monte Carlo observes the system’s behavior under various conditions.
- The open-source maritime platform called Autoferry Gemini [24] is developed using the unity game engine to simulate sensors in real time. The rendering pipeline can effectively model lidar, radar, visible-light, and infrared camera sensors concurrently by employing simulated optics and general-purpose GPU programs. The outcomes from visible-light cameras and lidar have demonstrated their effectiveness in supporting additional research on sensor fusion for autonomous ship technology. Infrared cameras spark interest in further empirical data gathering, and the implementation of GPU algorithms enables the real-time simulation of 3D radar models and multiple lidar types.
2.4. Comparison to Previous Survey Work in IoUTs
Table 2 summarizes most of the preceding surveys that have already been addressed. We conduct a comparison by examining underwater network protocols and 5G-based IoUTs as the primary points of comparison. Ref. [3] comprehensively reviews IoUTs architecture and their applications. IoUTs commonly incorporate UWSNs. The architectural considerations of IoUTs are discussed in detail [3], while [25] explores the intersection of big marine data and IoUT. Ref. [26] presents a review of collision avoidance and path planning algorithms. Ref. [27] focuses on the modeling and simulating cybersecurity and interoperability. The implementation of marine robotics agents garners attention in IoUTs systems, particularly due to the utilization of autonomous underwater vehicles.
Conversely, the assessment of routing protocol performance in underwater communication systems entails an extensive survey, with each underwater network presenting its distinct advantages and challenges. Practical underwater applications based on UWSNs are examined in [28]. The trade-off between underwater properties, wireless communication technologies, and communication technology is thoroughly explored in [29]. Practical applications in ocean and marine IoT, UOWN, and UWANs are discussed in [30,31,32,33,34,35], respectively. Wei et al. [36] provide a survey on wireless channel measurements and modeling perspective for maritime communications. Pons et al. [37] discussed the significance of tackling interference issues and optimizing network performance within 5G networks. Such efforts are crucial for ensuring dependable and efficient connectivity for IoT devices, a necessity for the smooth operation of business processes.
A comprehensive examination of simulation tools in underwater systems is presented in [8]. The evolution of 5G technology, encompassing crucial aspects like high data rates, low latency, massive device connectivity, network slicing, and energy efficiency, introduces novel opportunities for underwater exploration. Nevertheless, there remains a gap in simulations and practical implementations. Our work reviews existing simulation tools and delves into research works that implement protocols, systems, resource management, reliable communication, remote operation, and monitoring concepts to realize the fundamental principles of 5G underwater networks and beyond. The drawbacks of simulation tools in accurately replicating real-world underwater scenarios in a 5G context include limited environmental realism, hardware and protocol limitations, and a lack of standardization. Simulations may not fully capture the diverse and dynamic underwater conditions, including variations in water salinity, temperature, and turbidity. These environmental factors can significantly impact signal propagation and may not be adequately represented in simulations [34]. Simulations may not fully account for the hardware constraints and communication protocols specific to underwater 5G networks. The performance of underwater communication devices, such as acoustic modems, may be challenging to model accurately in simulation environments [8]. The absence of standardized models and parameters for underwater communication in simulation tools can lead to inconsistent results across different simulation platforms. This lack of standardization hinders the comparability and reliability of simulation outcomes [25].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 2.
Summary of existing surveys on IoUTs and underwater communications vehicular networks. Unmanned Underwater Vehicle (UUV); Underwater Optical Wireless Networks (UOWNs); Underwater Wireless Acoustic Networks (UWANs); and Underwater Visible Light Communication (UVLC).
Table 2.
Summary of existing surveys on IoUTs and underwater communications vehicular networks. Unmanned Underwater Vehicle (UUV); Underwater Optical Wireless Networks (UOWNs); Underwater Wireless Acoustic Networks (UWANs); and Underwater Visible Light Communication (UVLC).
| Ref. | Underwater Networks and Protocols | 5G-Based IoUTs | Focus of Discussion | ||||||
|---|---|---|---|---|---|---|---|---|---|
| UWANs | IoUTs | UWSNs | Ocean and Marine IoT | UOWN | UUVs | 5G-Based | Simulation Tools | ||
| 2012 [3] | {√} | IoUT architecture | |||||||
| 2015 [28] | {√} | Cutting-edge routing protocol | |||||||
| 2017 [6] | {√} | Practical underwater applications | |||||||
| 2018 [30] | {√} | Marine wireless big data | |||||||
| 2019 [31] | {√} | Advanced big data analytics | |||||||
| 2019 [34] | {√} | {√} | Trade-off between underwater properties, wireless communication technologies, and communication quality | ||||||
| 2020 [29] | {√} | {√} | {√} | Underwater high-reliability communication technology | |||||
| 2020 [8] | {√} | {√} | Simulator tools | ||||||
| 2021 [25] | {√} | {√} | {√} | {√} | Big marine data and IoUT | ||||
| 2022 [38] | {√} | {√} | {√} | AUV-aided maritime communications | |||||
| 2022 [26] | {√} | {√} | Collision Avoidance and Path Planning Algorithms | ||||||
| 2022 [27] | {√} | {√} | Modeling and Simulation of Cybersecurity and Interoperability | ||||||
| 2022 [32] | {√} | {√} | {√} | Vision of wireless optical and acoustic communication | |||||
| 2022 [33] | {√} | {√} | Marine Robotic Agents | ||||||
| 2022 [35] | {√} | Recent advancements of UVLC | |||||||
| 2021 [36] | {√} | {√} | Channel modeling for maritime communications | ||||||
| 2023 [37] | {√} | Interference and optimizing network performance in 5G networks | |||||||
| 2023 This work | {√} | {√} | {√} | {√} | {√} | {√} | {√} | Simulations tools and 5G-based underwater networks, IoUT applications | |
Nhu-Ngoc et al. [39] have emphasized the widespread recognition of aerial access infrastructure as a crucial component of a holistic sixth-generation (6G) network. However, they also pointed out the unfortunate neglect of underwater wireless communication (UWC). We agree with this observation, which prompts us to think about the maturity of UWC technologies and their potential role in 5G and beyond. Notably, many existing 6G proposals and studies have overlooked UWC in their envisioned technologies and applications. This oversight may be attributed to the various airborne and underwater communication environment barriers. First, implementing wireless communication underwater poses unique technical challenges due to the attenuation, absorption, and scattering of electromagnetic waves in water. The propagation characteristics of underwater channels are vastly different from those in terrestrial environments, making the design of and optimizing communication systems more complex. Second, unlike terrestrial wireless networks, there is limited infrastructure for underwater communication. The lack of underwater communication standards and dedicated infrastructure may hinder researchers from readily conducting experiments and studies in this area. Third, conducting experiments in underwater environments can be logistically challenging and time-consuming. Researchers must contend with factors such as varying water conditions, underwater topography, and the impact of environmental changes on communication signals. Research in underwater communication often requires specialized equipment, such as underwater sensors, acoustic modems, and AUVs. Acquiring and deploying these resources can be costly, limiting the scale and frequency of underwater network studies [40]. Fourth, much of the current 5G research and development is commercially driven, focusing on terrestrial applications. Industries and researchers may prioritize areas with more immediate commercial potential, such as urban environments, smart cities, and industrial applications. Research in 5G-underwater networks involves an interdisciplinary approach that combines expertise in wireless communication, signal processing, acoustics, marine biology, and oceanography. Collaborations across multiple disciplines are essential, and the complexity of such collaborations can be a barrier. Despite the substantial challenges, government agencies are incorporating cutting-edge 5G technology into their operations and undertaking projects that extend to underwater sensors. An example is the Pacific Northwest National Laboratory in Richland, Washington, situated southeast of Seattle. This location hosts the 5G Innovation Studio, a collaborative effort with Verizon. The studio has the potential to facilitate quicker data collection and analysis, enhance environmental monitoring efficiency, and improve communication with the Navy’s underwater assets [41].
3. Underwater Application-Assisted Underwater Wireless Communications and AUVs
3.1. Environment
Environmental monitoring stands out as a widely utilized category of IoUT applications. This encompasses various aspects such as monitoring water quality [42], tracking chemical and biological pollution [43], overseeing thermal and pressure levels, and monitoring temperature variations [44]. Moreover, the application scope extends to monitoring oil and gas pipelines through UWSNs [45]. It is worth noting that the demand for environmental monitoring systems has risen significantly, gaining popularity and becoming an essential component in the development of smart cities worldwide [46].
3.2. Underwater Exploration
The idea of the IoUT can find practical application in endeavors like the search for lost treasures in underwater settings. A notable example is the discovery of the Titanic in 1985, which was made possible through the utilization of AUVs by the Woods Hole Oceanographic Institution [47]. By using UWSN technologies, IoUT can also be applied to tracking of fishes [47]. Moreover, underwater natural-resource discovery, such as minerals [48], metals, corals, and coral reefs [49], can all benefit from the infrastructure of UWSNs, as well.
3.3. Disaster Prevention
Disaster prevention applications stand out as among the most vital applications of the IoUT due to their potential to safeguard lives. Water-related natural disasters pose significant risks. For instance, the Fukushima Daiichi nuclear disaster in Japan, which occurred on 11 March 2011, was predominantly triggered by a tsunami resulting from the Tohoku earthquake. IoUT is highly anticipated to play a crucial role in detecting and preventing disasters such as floods [50], earthquakes [51], and tsunamis [52], and to offer early warning services.
3.4. Military
The strength of a nation’s military frequently indicates its capacity to protect itself from various types of threats, including underwater threats. IoUT is essential for defense applications and can be utilized to detect submarines [53], underwater mines [54], and underwater surveillance systems [55]. These applications have great potential for the future naval forces.
3.5. Entertainment and Navigation
With the advancements in UWSNs, an increasing number of IoUT applications are becoming attractive, such as sports [56], navigation [57], and localization [58] applications. It is important to highlight that localization applications are exceptionally demanding and incredibly valuable. In practical terms, pinpointing underwater locations poses a considerable challenge due to the ineffectiveness of the Global Positioning System (GPS) in underwater settings. For instance, consider the scenario where underwater sensors can serve as reference points for locations, offering valuable location information to swimmers, divers, vessels, and underwater vehicles.
3.6. Underwater Applications Based on 5G Assisted Underwater Wireless Communications and AUVs
Through an extensive literature review, we discuss an architecture for both the Internet of Underwater application-assisted AUVs and the Internet of underwater thing communications in a 5G-based system. Underwater application-assisted AUVs include technical frameworks for systematically organizing frameworks and the IoUTs to provide advanced applications. On the other hand, the Internet of underwater thing communications in 5G-based systems focuses on the practical deployment and monitoring of underwater systems to fulfill different requirements such as bit error rate and spectral efficiency.
3.6.1. Underwater Internet of Applications Assisted by AUVs
Architectural frameworks (services) on underwater Internet of applications are generally deployed to enable diverse motion detection and object-tracking applications. Therefore, underwater Internet of applications and path planning for AUV mechanisms would support the involvement of advanced underwater applications based on 5G technologies. The issue of securing the underwater frameworks for UUVs is addressed through blockchain. Underwater communications connected with key generation were implemented. In the following, we present the applications framework and emphasize their design for motion and object tracking, trajectory and path planning for AUVs, and security. Figure 5 illustrates the architecture of Underwater applications-assisted Underwater Wireless Communications systems and UAVs.
3.6.2. Use Case: Harbor Security Scenario [3]
Securing harbors is crucial for maintaining the safety and integrity of maritime activities. Integrating the IoUT in harbor security introduces a range of technologies and scenarios to enhance monitoring, surveillance, and response capabilities. Underwater sensor networks, together with underwater and surface vehicles, can contribute to protecting harbors (see Figure 6). Ensure the security of the harbor by leveraging IoUT for real-time monitoring, threat detection, and rapid response to potential security incidents. The Key Components in this case are listed as follows:
- Underwater sensors: Deployed throughout the harbor, underwater sensors continuously monitor parameters such as water quality, temperature, and underwater traffic.
- Smart buoys: Equipped with sensors and communication modules, smart buoys are floating nodes for collecting data on surface conditions, vessel movements, and potential threats.
- AUVs: A fleet of AUVs equipped with advanced sensors and cameras patrols the underwater areas, inspecting underwater infrastructure and monitoring any suspicious activities.
- Surface station: A robust and secure communication network connects all IoUT devices, enabling real-time data exchange and coordination.
- Command and control center with acoustic and monitoring database: A central command and control center serves as the nerve center, where security personnel monitor incoming data, analyze potential threats, and coordinate response efforts.
Scenario events are illustrated as follows:
- Unauthorized underwater activity: An underwater sensor detects abnormal movement in a restricted area. The information is relayed to the command center, triggering an alert.
- AUV investigation: AUVs are dispatched to the location of the detected activity to investigate and capture visual data. The AUVs send live video feeds to the command center.
- Surface drone confirmation: Surface drones are deployed to confirm the threat and provide additional surveillance from the surface. They relay live video feeds to the command center, enabling a comprehensive view.
- Automated threat analysis: The IoUT system employs artificial intelligence (AI) algorithms to analyze the collected data, identifying potential threats and distinguishing between routine activities and security risks.
- Alert and response: Upon confirmation of a security threat, the command center alerts relevant authorities, law enforcement, and harbor security teams.
- Emergency protocols: Based on the severity of the threat, predefined emergency protocols are activated, which may include lockdown procedures, the deployment of additional security personnel, or coordination with naval forces.
- Public notifications: If necessary, the IoUT system can disseminate information to the public, neighboring ports, and relevant stakeholders to ensure a coordinated response.
3.6.3. Motion Tracking and Monitoring
Wireless sensor networks allow different applications and development in new 5G technology. Motion detection and underwater object tracking techniques are implemented by leveraging UWSN architecture. The issue of mobility of underwater objects is addressed by using a statistical analysis approach to compute the next possible position of the node. Pratil et al. [59] introduced a method for tracking and monitoring underwater movement through underwater wireless sensor networks and machine learning. It conducted simulations for two scenarios involving the random mobility of nodes. The simulations showcased the utilization of a 2D-Underwater Acoustic Sensor Network architecture to predict the probable next position of the node. In cases where the number of nodes varies and nodes are spread out across a large area with lower network density, detection accuracy is notably impacted, resulting in lower accuracy than networks in denser regions. In the case of dense to smaller areas, the prediction trend reduces the accuracy. For applications related to visual tracking, Alawode et al. [60] introduced an innovative algorithm for enhancing underwater images, primarily aiming to improve the tracking quality. The performance of the Underwater Visual Object Tracking (UVOT) algorithm was assessed using an extensive UVOT benchmark dataset, referred to as UVOT 400, which the authors created. This dataset comprises 400 video segments and 275,000 manually annotated frames. These annotations include characteristics like watercolor variations, target distractors, camouflage, relative target size, and low-visibility conditions. Enhancing underwater image quality is of significant importance in the realm of underwater vision. Peng et al. [61] introduced a method for restoring underwater images of seafloor targets, utilizing a hybrid attention-based conditional generative adversarial network. The input image was generated using a novel underwater network (U-net) generator to encode and decode the input. In this process, the U-net was enhanced with a hybrid attention mechanism module that combines spatial and channel attention to bolster the network’s depth.
Experimental results demonstrated that the proposed method displayed robust noise reduction capabilities, and testing in real-world applications showed its promising potential for improving seafloor target detection.
3.6.4. Local Path Planning for Unmanned Underwater Drones
Researchers have focused on resource allocation in the context of path and trajectory planning for unmanned underwater drones. AUVs have gained prominence and importance in advanced underwater search and exploration due to their advantages over traditional manned underwater vehicles. The primary concern regarding path and trajectory planning towards a target point in underwater wireless communications has yielded significant findings, particularly in AUVs’ global and local path planning. Chinonso et al. [62] overviewed machine learning (ML) techniques on local path planning for AUVs. The ML algorithms discussed are classified intosupervised, unsupervised, and reinforcement learning.
Marine scientists and naval specialists have explored the planning of flight trajectories by optimizing resource allocations to detect underwater objects in remote oceans. In their research, Lin et al. [63], explored a solution for underwater detection systems by utilizing a combination of UAVs and the IoT platform. The approach involves the use of sonobuoys to collect underwater acoustic data and then wirelessly transmit these data to agile and controllable AUVs. The AUVs, however, have limitations in terms of communication bandwidth and maneuverability, which prevent them from flying over each sonobuoy to collect all the raw data. The researchers implemented bandwidth allocation and flight trajectory optimization to address this challenge. This approach allowed for the collection of diverse acoustical measurements from different sonobuoys. They used a fairness utility function combined with an allocation strategy to assign radio resources, effectively reducing the communication distances between sonobuoys.
3.6.5. Security Mechanism for Unmanned Underwater Drones
Security mechanisms for unmanned underwater drones, also known as AUVs, are essential to protect these systems from various threats and ensure the integrity of their missions. We introduce some key aspects of security mechanisms for AUVs.
Data encryption is vital for securing AUV and its control station communication. It prevents unauthorized access and eavesdropping on sensitive information transmitted between the drone and the control center. The research in [64] reveals significant progress in creating a streaming application within a military context, particularly in counter-AUV scenarios. This application is designed to be efficient, secure, rapid, and reliable for transmitting audio and video data. Moustafa et al. [65] centers on achieving seamless coordination between an underwater robot and a quadcopter by developing an efficient and secure video wireless communication system using the Block Packet Cipher (BPC) algorithm. The primary objective is to enhance security during video transmission from the AUV to the UUV. The encryption process involves performing bitwise modulo-2 addition on plaintext blocks, with block sizes ranging from 128 to 1024 bits, combined with pseudo-random binary numbers of equal length. The result is the Quadcopter Underwater Robotic System (QURS), which offers real-time obstacle avoidance capabilities in conjunction with the HydroView Sport Remote Operated Underwater Vehicle.
3.6.6. Wormhole Attack in IoUTs with UWSN Links
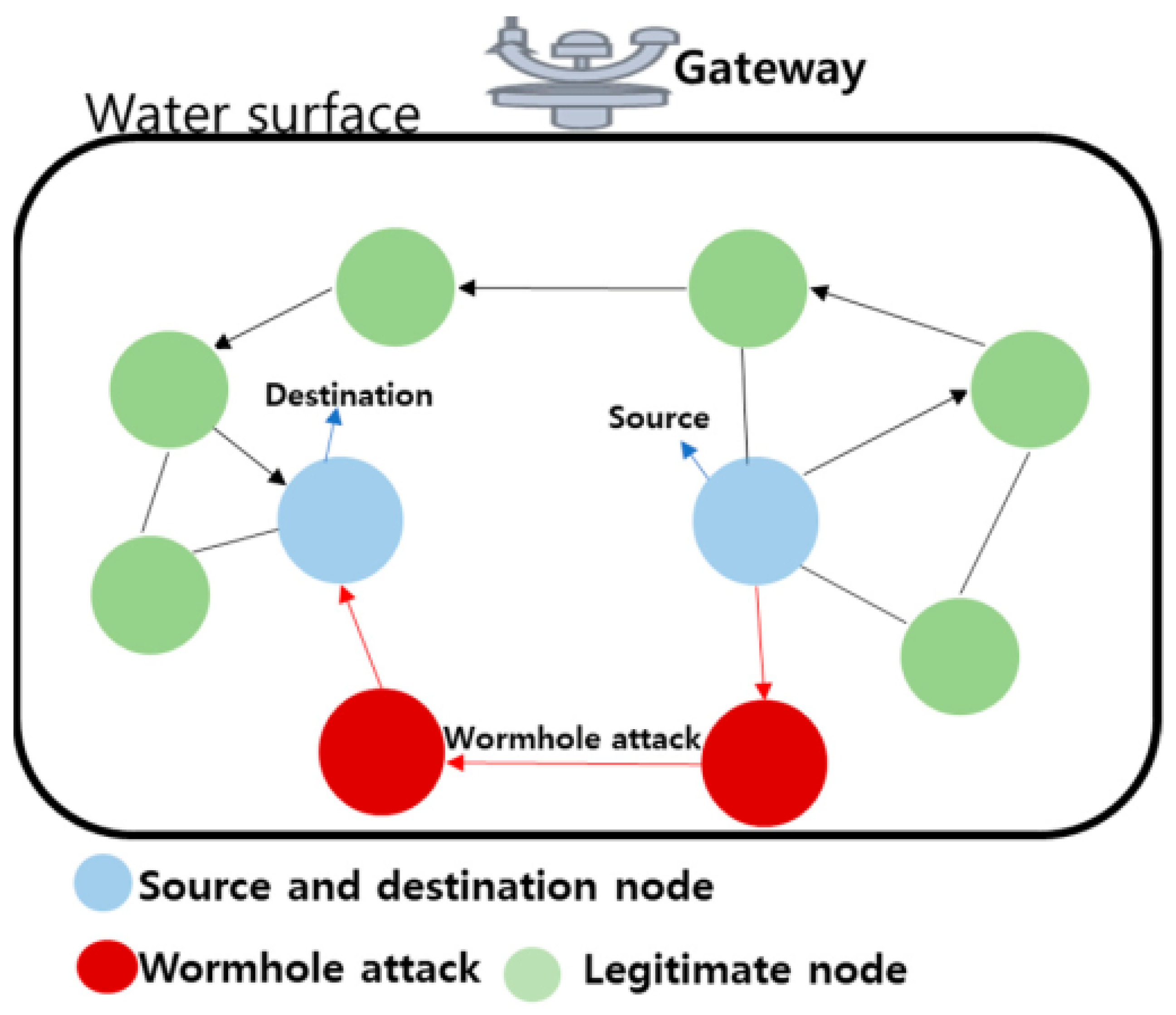
A wormhole attack is a security threat in wireless networks, including IoUT environments. In a wormhole attack, an adversary captures packets at one location in the network and tunnels them to another, creating a shortcut that can be exploited to manipulate network behavior. The illustration of a wormhole attack is shown in Figure 7.
The way the wormhole attack works in IoUT is summarized as follows:
- Adversary placement: The attacker strategically places two or more compromised nodes at different locations in the underwater network.
- Packet tunneling: When a legitimate communication occurs between two nodes, the attacker captures the packets at one location and quickly tunnels them to another through an out-of-band channel, creating a shortcut.
- Misleading routing information: The adversary uses the tunneled packets to present misleading routing information to the network, making it appear that the communication occurred through the shortcut.
- Denial of service or manipulation: By manipulating the routing information, the attacker can disrupt normal communication, drop or modify packets, or potentially launch other attacks, leading to a compromise of the IoUT system.
The goals and classification of security attacks in the UIoT environment are comprehensively discussed by Delphin et al. [66].
The security of unmanned underwater drones is paramount, mainly when these systems are used for scientific research, military applications, or underwater infrastructure inspection. Security measures should be tailored to the specific operational environment and potential threats. Advances in security technology and practices continue to evolve to address the unique challenges posed by underwater systems.
Underwater applications in 5G networks leverage advanced communication technologies to enable connectivity in aquatic environments. We summarized some applications that would emerge with 5G networks. A description of underwater applications in literature will be illustrated in Figure 8. Ref. [25] presents a comprehensive review of IoUT applications.
4. Underwater 5G-Based Networks
Implementing 5G technology in UWSNs signifies a significant advancement in underwater communication capabilities. This integration brings about enhanced data rates, lower latency, and improved overall performance in underwater sensor networks.
The surveyed underwater techniques were found to come from six different categories with varying characteristics regarding 5G networks and simulation tools used for evaluation performance. The majority of the works examined propose algorithms that fit into one of the following six categories. Thus, this section is dedicated to studying state-of-the-art advances in such underwater access infrastructures, simulation tools for evaluation, and 5G methodologies in supporting underwater services.
4.1. UWSNs
UWSNs are specialized networks designed for communication and data exchange among underwater sensor nodes. These networks are used for various applications, including environmental monitoring, underwater exploration, disaster prevention, and military surveillance. Table 3 lists work on UWSNs with 5G and simulation tools for evaluation.
Gavali et al. [67] proposed a protocol involving the use of an effective fitness function-based particle swarm optimization (EFF-PSO) algorithm to strategically select the optimal forwarder node responsible for UWSN data delivery. In the protocol, the intended source node identifies forwarding relay nodes based on location information. Subsequently, the EFF-PSO algorithm is employed to choose the optimal relay node, considering a comprehensive set of parameters. It provides the high data rate required for the 5G aspect. The simulation was conducted using AquaSim.
Sathish et al. [68] presented analyzing performance parameters for UWSNs. Their study explores various performance parameters within a random waypoint mobility model by adjusting the maximum speed of a node and modifying the number of nodes in the mode. The examined parameters encompass average transmission delay; average jitter; average path loss; percentage of utilization; and energy consumption in transmit, receive, and idle modes. Their work would enhance low latency as a key aspect of 5G network. They use QualNet 7.1 simulator for evaluation.
Soumadeep et al. [69] introduce an adaptive decentralized intrusion detection and prevention system, referred to as AIDPS. AIDPS aims to enhance the security of UWANs by effectively detecting underwater-related attacks such as blackhole, grayhole, and flooding attacks.
Alablani et al. [19] introduce a novel MAC/routing protocol for UWSNs named the energy-efficient protocol for UWSNs (EE-UWSNs). The protocol is founded on five key principles to conserve sensor energy and prolong UWSNs’ lifespan. These principles involve utilizing finite power levels, implementing multi-hop transmission, restricting the transmission scope, employing an inactivation mode, and ensuring energy consumption balance. The simulations were conducted with the AUVNetSim simulator. It is a Python project developed by the Massachusetts Institute of Technology (MIT).
Hussain et al. [70] proposed an approach that focuses specifically on cooperation and relay optimization schemes, presenting an extension of the Neighboring-Based Energy-Efficient Routing (NBEER) protocol. Performance evaluation considers path loss, end-to-end delay, packet delivery ratio, and energy consumption.
Sathish et al. [12] focus on the analysis of UWSN performance, comparing various routing protocols. They proposed the source-tree adaptive routing-least overhead Routing over LoRa (STAR-LoRa) approach. The simulation results show that STAR-LORA demonstrates an 85.3% lower jitter than conventional routing protocols, emphasizing its efficiency in minimizing transmission delays. Interestingly, the fisheye routing protocol achieves a 91.4% higher utilization percentage than its counterparts, highlighting its efficacy in optimizing network resources. The results obtained using the QualNet 7.1 simulator underscore the suitability of these routing protocols in UWSN applications.
Subash et al. [71] implement a model that enables dynamic provisioning of resources through the concept of network function virtualization (NFV). The traffic modeling follows both non-bursty and bursty types of traffic in UWSN. The current resource availability of virtual network function nodes with the multi-level traffic intricate NFV chain in UWSN is estimated by leveraging both the leftover service property and convolution associativity property.
Deivasigamani et al. [32] delve into various communication modes, architectures, and protocol layers relevant to underwater communication. Additionally, they establish an underwater hybrid connection through opto-acoustic signals, providing an overview of different performance characteristics, channel behaviors, and challenges encountered in underwater scenarios.
Overall, developing reliable and energy-efficient communication protocols and robust underwater sensor nodes is crucial for successfully deploying and operating UWSNs. Some challenges are listed:
- Limited Bandwidth: Underwater communication faces challenges due to the limited bandwidth of acoustic signals, which are the primary means of communication underwater.
- High Propagation Delay: Signals travel slower underwater compared to in the air, leading to higher propagation delays.
- Multipath Propagation: Underwater channels often exhibit multipath propagation, where signals take multiple paths to reach the destination.
Pourkabirian et al. [72] proposed a concept that involves collecting received signal strength (RSS) observations and estimating the angle of arrival (AoA) based on error variance. Realistic deployment assumes the assumption that noise information is not available. Consequently, a min–max approach is presented to optimize worst-case performance and enhance estimation accuracy under unknown parameters. The proposed estimator’s mismatch is also analyzed using mean-square error (MSE).
Diwan et al. [73] develop an approach that employs a multi-dimensional method to present use cases for IoUT in the marine and undersea objects domain. The work showcases significant applications and real-world domains interfacing with essential IoUT components. The proposed approach adopts a multi-hop and metaheuristic-based strategy to enhance IoUT’s effectiveness and overall performance.
Pei et al. [74] explore the application of Fed-IoUT in various fields, encompassing water quality monitoring, underwater life detection, flood forecasting, underwater detection, and marine energy transfer. Additionally, they discuss the current development limitations and provide a comprehensive outlook for the future.
Omeke et al. [75] provide profound importance to the ocean, which has spurred the application of AI ML tools to foster a sustainable marine ecosystem. Their review provides a concise overview of the reinforcement learning (RL) paradigm, its classifications, and the development of RL algorithms designed to address crucial challenges in IoUTs. New literature continually showcases innovative applications of RL in underwater communications and networking that surpass conventional solutions and other ML-based methods. RL’s online learning nature benefits decision-making in dynamic environments like underwater scenarios.
Yan et al. [76] introduce a Hybrid G-STAR (H-G-STAR) routing protocol that builds upon the strengths of G-STAR while being specifically adapted to the unique underwater conditions. Various degrading factors within underwater channels significantly constrain the performance of the G-STAR protocol.
Zainab et al. [77] discussed methodologies required for resource-efficient and distributed cross-domain data fusion. They proposed distributed neural networks to compute data analytics pipelines for resource efficiency, extracting highly aggregated patterns of interest from raw data. These aggregated patterns will serve as a common base in time and space for the fusion of heterogeneous data.
4.2. Internet of Underwater Things
The IoUT holds great potential for advancing our understanding of the underwater world. Table 4 lists work on IoUTs with 5G and simulation tools for evaluation.
Taneja et al. [78] discussed monitoring Industry 5.0 requirements at remote levels that introduce additional communication challenges in UWSNs. The utilization of relays in 6G wireless networks is restricted due to high energy demands. Consequently, their work explores Intelligent Reflecting Surfaces (IRSs) as a solution for energy-constrained 6G wireless networks to establish a seamless connection among communicating mobile nodes. The system incorporates an IRS equipped with an array of reflecting elements. They also present a use-case scenario illustrating the application of an IRS-enabled network in IoUT for smart ocean transportation. Sayed et al. [79] introduce an efficient clustering scheme that judiciously selects the best cluster heads (CHs) using a combination of the artificial bee colony (ABC) and Q-learning optimization approaches. The proposed scheme facilitates the effective selection of CHs based on four critical factors: residual energy level, depth, distance from the base station, and signal quality. The evaluation begins by assessing various swarm algorithms, including genetic algorithm (GA), particle swarm optimization (PSO), ant colony optimization (ACO), and ABC, to determine the most suitable one for improving the CH selection mechanism.
The IoUTs address various underwater exploration and monitoring challenges. As technology continues to advance, IoUT is likely to play an increasingly important role in scientific, industrial, and environmental applications to address some of the challenges:
- Communication Range and Reliability: Underwater communication faces limited range, signal attenuation, and multipath propagation challenges.
- Energy Efficiency: Many underwater devices operate on limited power, so energy-efficient communication and sensing technologies are crucial.
- Localization: Accurate localization of devices is challenging underwater due to the absence of GPS signals, requiring acoustic or other localization methods.
- Data Security: Ensuring the security and integrity of data transmitted in underwater networks is a significant concern.
4.3. Unmanned Underwater Vehicle (UUV) Networks
UUV Networks involve deploying and coordinating multiple AUVs to perform various tasks, including data collection, surveillance, exploration, and environmental monitoring.
Types of UUVs
- AUVs are self-propelled vehicles capable of independent navigation and data collection. AUVs are often used for scientific research, oceanographic studies, and underwater mapping.
- Remotely Operated Vehicles (ROVs): Unlike AUVs, ROVs are typically tethered to a surface vessel and are operated remotely by human operators. They are commonly used for tasks that require dexterous manipulation or realtime control. UUVs in a network often share information about their position, status, and sensor data to navigate and achieve mission objectives collaboratively.
Collaborative navigation may involve techniques such as cooperative localization, where vehicles use each other’s positions to improve accuracy. Mission Planning and Coordination have the following challenges:
- UUV networks require sophisticated mission planning algorithms to optimize the deployment of vehicles and achieve mission objectives efficiently.
- Coordination mechanisms ensure that UUVs can work together to cover a large area, avoid collisions, and adapt to changing environmental conditions.
Unmanned Underwater Vehicle Networks have the potential to revolutionize our ability to explore and understand the underwater world, providing valuable data for scientific research, environmental monitoring, and various industrial applications. As technology advances, the capabilities of UUV networks are likely to expand, opening up new possibilities for underwater exploration and resource management.
Nomikos et al. [38] explore the state-of-the-art in AUV-aided maritime communications, encompassing conventional optimization and machine-learning-aided approaches. They begin by discussing relevant AUV-based network architectures and the roles of their building blocks. Their survey then delves into physical-layer solutions, resource management cloud/edge computing, and caching AUV-aided approaches in maritime environments, categorizing them based on their performance targets.
Jadav et al. [80] proposed a framework of AI-enabled classifiers to enable the system to first distinguish between normal and malicious IoUV data, reducing the computational overhead of the network. Subsequently, the data traverses the multi-layered encrypted network, simultaneously undergoing validation through token verification and time-to-live checks to ensure secure delivery to its destination. Integrating the InterPlanetary File System (IPFS) enhances the proposed framework’s cost-effectiveness and scalability.
Kot et al. [26] evaluate AUV development by conducting experiments in real environments to rely on classical methods predominantly. Both classical and AI methods are frequently employed in simulation studies, particularly reinforcement learning and fuzzy logic. Among classical methods in simulation studies, the artificial potential field (APF) approach is the most commonly used.
Kotis et al. [27] address challenges associated with the volume, velocity, variety, and integrity of data transmitted at low bit rates due to the underwater medium. Their work explicitly explores research topics related to UUVs, focusing on interoperability and cybersecurity within swarms operating in military and search-and-rescue scenarios. The dual objectives of this work are to review existing methods and tools for semantic modeling and simulation, particularly in the context of the Internet of Underwater Things.
Gao et al. [81] analyzed the challenges associated with data transmission in wireless sensor networks when capturing island ecological and environmental information. They propose several solutions to ensure efficient and reliable data transmission in this context. Xu et al. [23] demonstrated practical scenarios with a random distribution of sea stations (SSs). They model the channel using the point-to-area model, the Rician model, and the Shadowed-Rician model. As the SS’s distance from the coastline increases, different relay stations result in specific received signal strengths at SSs due to considering different channel models. The relay station with the highest signal strength is selected at any given time. Consequently, the respective strengths of the various relay stations vary as we move away from the coastline, altering the association preference.
Kabanov et al. [33] establish a cohesive approach for data exchange. It is crucial to define the architecture of the Marine IoT platform. They present an overview of various approaches for determining underwater and marine communication system architectures based on the IoT concept. The work comprehensively studies Mobile IoT applications, challenges, and architectures.
UUV networks are designed to operate collaboratively and distributed, allowing UUVs to work together to achieve common objectives.
Table 5 lists UUVN related works with 5G and simulation tools for evaluation.
4.4. Underwater Optical Wireless Communication
UOWN refers to communication networks that use optical signals to transmit data underwater. Unlike traditional acoustic communication, the primary means of communication underwater, optical wireless communication leverages light to achieve higher data rates and potentially longer ranges in clear water conditions. UOWNs would have some challenges as follows:
- LEDs and Lasers: Light-emitting diodes (LEDs) and lasers are common light sources in UOWN. LEDs are suitable for short-range, low-power applications, while lasers can be used for longer-range and higher-bandwidth communication.
- Modulation Techniques: Various modulation techniques, such as on-off keying (OOK) or quadrature amplitude modulation (QAM), encode information onto optical signals.
- Water Turbidity: Suspended particles and water turbidity can scatter and absorb optical signals, affecting the quality and range of communication.
- Line-of-Sight Requirement: Optical communication relies on line-of-sight, meaning that obstacles like underwater terrain or structures can obstruct communication.
Table 6 lists UOWNs with 5G and simulation tools for evaluation.
Zhu et al. [82] apply the mixture exponential-generalized gamma (EGG) distribution to characterize the probability density function (PDF) of reference-channel irradiance of OAM beams coupled into a single-mode fiber (SMF). Performance metrics, including outage probability, average bit-error rate (BER), and ergodic capacity, are analyzed using the PDF for both single-input–single-output (SISO) and multioutput (MIMO) systems.
Ali et al. [83] investigate the end-to-end (E2E) performance of a dual-hop mixed Free-Space Optical (FSO) and Ultraviolet Light Communication (UVLC) system using intensity modulation/direct detection (IM/DD) with pulse amplitude modulation (PAM).
Shin et al. [84] proposed a two-phase deep reinforcement learning (TPDRL) algorithm that involves two agents (inner and outer) making different decisions within the underwater sensor. The external agent selects a transmission power level based on the long-term SNR, while the inner agent determines the beam divergence angle for the given power level, considering short-term instantaneous SNR.
Zhou et al. [85] proposed an approach that involves utilizing modulation techniques grounded in dynamical chaos at the physical layer of the communication channel. The communication channel is modeled by computing the impulse response through a numerical solution of the radiation transfer equation using the Monte Carlo method. The study evaluates modulation methods based on the correlation processing of the received signal, including chaotic mode switching and chaotic on-off keying (COOK).
While UOWN presents promising opportunities for higher data rates and faster communication in underwater environments, the specific conditions and challenges of underwater communication, such as water turbidity and signal attenuation, must be carefully considered in the design and implementation of these networks. Advances in technology and ongoing research efforts continue to contribute to the development and improvement of UOWNs.
4.5. Underwater Wireless Acoustic Networks (UWANs)
UWANs are communication networks that use acoustic signals to transmit data underwater. Unlike terrestrial environments where radio waves are commonly used, underwater environments pose challenges that make acoustic communication the preferred choice due to its ability to propagate through water. The key aspects of UWANs are listed as follows:
- Acoustic Signals: Sound waves are the primary medium for communication underwater. Acoustic signals can travel long distances in water, making them suitable for underwater communication.
- Modulation and Encoding Techniques: Various modulation schemes are used to encode information onto acoustic signals, including Frequency Shift Keying (FSK), Phase Shift Keying (PSK), and Amplitude Shift Keying (ASK).
- Error Correction Coding: Due to the challenges of underwater communication, error correction coding techniques are often employed to enhance the reliability of data transmission.
Table 7 summarizes UAWNs with 5G and simulation tools for evaluation.
Bushnaq et al. [90] proposed a model designed to be compatible with both 5G and 6G infrastructure standards. The particle swarm optimization method employs the automated slicing framework that considers the unique characteristics of underwater acoustic methods to allocate resources efficiently, ensuring that the service level agreements of various stakeholders or applications are met. The proposed model’s effectiveness, flexibility, and efficiency are evaluated through advanced computational modeling.
Signori et al. [22] designed an effective approach that implements a reputation system. In the system, the node accumulates trust through good behavior and loses trust when exhibiting suspicious behavior. Applying a reputation system in an underwater network distinguishes intentional malicious behavior from performance degradation due to changing channel conditions, leading to a higher packet drop rate.
Petroni et al. [86] proposed a spatial division multiple access, achievable in Multiple-Input Multiple-Output (MIMO) systems. It has emerged as a promising technique suitable for the multipath propagation characteristics of UWANs. In the context of underwater medium access control, this study explores a novel hybrid multiple access technique operating in a two-dimensional resources domain, encompassing space and frequency. The objective is to alleviate multi-user interference by leveraging spatial diversity and, if necessary, implementing frequency reuse.
Huang et al. [87] explore the application of ML techniques with intelligent capabilities to improve system performance through task-oriented learning from data. The overview encompasses the literature on UAC and ML, specifically focusing on adaptive modulation and coding (AMC) as a promising niche application. Key open issues and research opportunities are discussed, providing a layered perspective and a concise taxonomy of ML algorithms relevant to UWANs.
Jakubisin et al. [88] investigate the influence of modulation schemes on the resilience of underwater acoustic communications in the presence of channel impairments, interference, and jamming. Specifically, Binary Frequency Shift Keying (BFSK) and Orthogonal Frequency Division Multiplexing (OFDM) schemes for underwater acoustic communications are examined, and the effectiveness of polar coding in enhancing resilience is evaluated.
Coccolo et al. [89] introduce the complete system implemented for small-scale demonstrations within the Robotic Vessels as-a-Service project. The project introduces an on-demand, service-based cloud system that dispatches unmanned vehicles capable of autonomously or piloted performing required services. These vessels interact with sensors in the port and the shore station through an integrated underwater and above-water network. The system’s validation through sea trials and its demonstration in an underwater sensor data collection use case establishes the proof of concept, demonstrating technical feasibility.
UWANs play a vital role in advancing our understanding of the underwater environment and supporting various applications. Ongoing research focuses on improving communication protocols, enhancing energy efficiency, and developing innovative techniques to overcome the challenges associated with acoustic communication underwater.
4.6. Underwater Visible Light Networks
Underwater Visible Light Communication (UVLC) networks involve the use of visible light as a medium for communication underwater. Visible light communication (VLC) utilizes the visible light spectrum, typically the range of visible light to the human eye, for data transmission. This technology is particularly relevant when traditional wireless communication methods like radio frequency may be limited. Here are key aspects of Underwater Visible Light Networks:
- Visible Light Spectrum: UVLC uses light in the visible spectrum, which includes wavelengths between approximately 380 and 750 nanometers. Light-emitting diodes (LEDs) are commonly used as light sources for UVLC.
- Advantages:
- Higher Data Rates: Visible light communication can offer higher data rates than traditional acoustic communication in underwater environments.
- Low Latency: Light travels faster than sound in water, resulting in lower communication latency.
- No Interference with Marine Life: UVLC does not produce acoustic signals, making it less likely to interfere with marine life than acoustic communication.
Table 8 lists work-related UVLC with 5G and simulation tools for evaluation.
Alsos et al. [24] outline the purpose, operational scope, technical design, physical setup, and equipment of the research infrastructure. They also present a roadmap for its ongoing development to address future challenges related to autonomous ships and their supervision and control. Additionally, the paper highlights several research questions that will be explored in the lab in the coming years.
The model proposed by Hu et al. [91] utilizes preceding short-term committed information rate (CIR) data from channel estimation for online training and subsequently applies the trained model for CIR prediction to track time-varying UWA channels. To assess the predicted CIRs’ effectiveness, a scheme combining space-time block coding (STBC) and minimum mean square error (MMSE) pre-equalization for the UWA MIMO system is designed. Numerical simulations demonstrate the practical feasibility and low BER of the proposed STBC-MMSE pre-equalization scheme.
Li et al. [92] proposed a strategy that involves an algorithm for the adaptive selection and merging of beams based on the degree of interference between them in space. Beams with high interference are merged using diversity technology to reduce interference, while spatial multiplexing is still performed between low-interference LED groups. Within the same beam, we employ an OFDM-NOMA scheme to match and group users, sending signals from different user groups through different subcarriers to enhance resource utilization. Simulation results indicate that users employing the adaptive transmit diversity strategy achieve a BER meeting Forward Error Correction (FEC) limits, even in high inter-beam interference.
Firouzabadi et al. [93] provide a new simulation framework, an ongoing academic project, that is publicly accessible through a user interface on 14 December 2023 http://www.piotsimulation.com, requiring no installation. It employs a realistic database containing actual locations and features of BSs along with the actual locations of IoT user equipment devices. The interface serves operators and researchers, providing insights into network behavior while deploying new applications and generating data for artificial intelligence and machine learning algorithms. This paper aims to offer a comprehensive description of the PIoT modeling architecture, along with illustrative use cases to aid potential users in understanding the simulator’s capabilities.
Through an examination of container-terminal case studies and their specific contexts, Clemente et al. [94] review these crucial aspects and identify leading smart seaports in automation, real-time management, connectivity, and accessibility control. The paper also explores the potential integration of marine renewable-energy systems to contribute, at least partially, to seaport energy requirements. By integrating these considerations, the paper aims to propose a comprehensive model.
The study by Ali et al. [35] offers a thorough and comprehensive survey of recent developments in UVLC implementations aimed at addressing challenges related to optical signal propagation. The research provides a detailed overview and future perspectives on underwater optical signaling, focusing on its relevance to 5G and beyond (5GB) networks. The discussion covers various aspects, including ongoing project schemes, channel impairments, optical signal modulation techniques, architectures for UWSN incorporating energy harvesting approaches, possibilities for hybrid communication, and advancements in the IoUTs.
Integration with other technologies provides the following key research directions:
- Hybrid approaches: Hybrid networks that combine UVLC with other communication technologies, such as acoustic communication, are explored to leverage the strengths of each in different underwater scenarios.
- Ongoing research focuses on improving the range and reliability of UVLC in varying underwater conditions. This includes developing advanced modulation techniques and signal-processing algorithms. UVLNs represent an innovative approach to address the challenges of underwater communication. As technology continues to advance, UVLC has the potential to play a significant role in underwater sensing, exploration, and communication, offering higher data rates and new possibilities for underwater applications.
4.7. Practical Development Infrastructure for IoUTs Enabled AUVs
4.7.1. Designing Shore Control Centres in the Age of Autonomous Ships
The AUVs employ control rooms to perform various scheduled tasks. Ref. [24] explored the future design of submarine control rooms, considering factors like team composition and control room layout. The sensors used in these control rooms are also integrated into a simulation environment, offering a valuable research tool.
Various research organizations share an interest in this field, and it is noteworthy that simulators are frequently employed to investigate human aspects and the implications of innovative design concepts. This approach proves highly advantageous in safety-critical scenarios, preventing accidents while testing new design ideas. It underscores the importance of creating and utilizing a simulator in the context discussed in this article. In summary, there is a certain degree of knowledge transfer from other domains to the maritime sector, such as incorporating insights from wide-angle camera views studied in aviation. However, the differences in technologies, dimensions, environmental factors, and required expertise are substantial. Therefore, the shore-based monitoring and control of Maritime Autonomous Surface Systems (MASS) stand out as crucial research facilities for advancing automation in the Maritime Domain [24]. The illustration of the implementation is shown in the Figure 9.
4.7.2. System Architecture and Communication Infrastructure for the RoboVaaS Project
The use of drones, whether they operate in the air, on land, or in water, has experienced a significant surge in popularity in recent years [33]. This trend reflects the concerted efforts of the scientific community and the industry to establish common ground for tools necessary to operate and advance such robotic systems. The primary challenges revolve around mobile robots’ diverse and intricate nature, stemming from either the nonlinearities inherent in their mathematical models or the broadly defined operational parameters. Additionally, integrating real-time data poses significant challenges, serving as input for complex navigation algorithms or teleoperation. The architecture illustration is shown in the Figure 10.
The marine assets employed in this project, both underwater and above water, require information exchange to facilitate the RoboVaaS services. For underwater data transfer, acoustic communication systems benefit from the maturity achieved in acoustic transmission and signal processing techniques [22]. Recently developed acoustic low-power sensor nodes [19] have been utilized, and the data gathered by these sensors have been gathered by a newly designed Autonomous Surface Vehicle (ASV). This ASV has an acoustic modem for underwater communication and an above-water wireless link. The ASV utilizes the wireless link to transmit the collected data to the shore.
This project introduces two primary innovative elements. Firstly, it brings forth the “as-a-service” concept to port activities, allowing the on-demand execution of tasks typically performed periodically by port authorities. Users can request services through a web interface, deviating from the traditional approach. The second significant innovation is utilizing unmanned surface and underwater vehicles for all services. It eliminates the necessity for manned vessels, specialized crews, or divers, significantly reducing risks for human operators, particularly at greater depths where risks escalate. Implementing each service involved introducing various innovative components, ranging from a surface vessel capable of transporting an ROV to integrating underwater and above-water network components. A cost-effective acoustic modem was also developed to retrieve data from a dense underwater sensor network. The article provides a detailed account of deploying this integrated and affordable system, enabling the monitoring of coasts, rivers, and lakes at a significantly lower cost than traditional offshore deployments. All components operate in real-time without the need for additional postprocessing, underscoring the high Technology Readiness Level (TRL) of the system.
5. Challenges and Future Work
As the Internet of Underwater Things is new, there can be some future works and potential solutions to mitigate underwater communications challenges through 5G technology. The aforementioned investigation demonstrated the potential of various technologies and developments in 5G access networks to support their envisioned applications. Therefore, this section aims to shed light on applicable scenarios where UWC can be integrated into 5G and beyond networks to bridge the gaps. Then, we discuss potential 5G techniques to mitigate the challenges of 5G-based underwater networks, such as channel characteristics, propagation loss, interference, energy efficiency, and sensor integration.
5.1. Applicable Scenarios Where UWC Can Be Integrated into 5G and beyond Networks
Applicable scenarios that integrate 5G and beyond networks and IoUTs include IoT-based underwater for maritime communication, underwater VLC communication for remote exploration and monitoring, and underwater wireless communications assisted by an optical intelligent surface.
Future work in IoT-based underwater for maritime communication in 5G and beyond systems is crucial because utilizing the higher frequency bands of 5G, such as millimeter waves, can enhance data rates for underwater communication. From a low-latency perspective, 5G’s low-latency capabilities are crucial for real-time communication, enabling timely responses for critical applications. Combining 5G-based underwater communication with satellite communication can provide a comprehensive solution for maritime connectivity, enabling seamless communication across the surface and underwater.
Underwater VLC communication for remote exploration and monitoring would draw attention because water absorbs and scatters light, leading to signal attenuation. To overcome this, 5G techniques for efficient modulation and encoding techniques should be envisioned to enhance the range of underwater VLC, which is limited due to the absorption of light by water. This can be addressed by optimizing the design of light sources and receivers. With the advancement of 5G-based VLC, new reliable connectivity solutions would address the issue of the presence of particles and impurities in water that affect the clarity of the light signal, impacting communication reliability.
5G underwater communication can leverage millimeter-wave frequencies, with higher data rates and shorter wavelengths, allowing for improved data transmission in underwater environments. While optical communication is an option, combining it with acoustic communication can provide a reliable backup in cases where optical signals may be attenuated or scattered. In addition, optical intelligent surfaces (OIS) can be used to focus and steer optical signals, enhancing the range and reliability of underwater optical communication. Therefore, the integration of 5G technology with optical intelligent surfaces holds promise for improving underwater wireless communication through integrating OIS with other emerging technologies, such as AI/ML, which can further enhance the adaptability and efficiency of underwater communication systems. Standardizing protocols and interfaces for 5G-based underwater communication systems will promote interoperability and widespread adoption.
5.1.1. IoT-Based Underwater for Maritime Communication
The application of IoT for maritime communication, particularly in underwater settings, is an emerging and rapidly evolving field.
- Underwater Communication: The acoustic nature of underwater communication leads to challenges like limited bandwidth, high latency, and vulnerability to noise and interference.
- Power Management: Battery life for underwater IoT devices is a concern, as changing or recharging batteries in underwater systems can be difficult and expensive.
- Data Security: Ensuring the security of data transmitted and received underwater is essential, particularly when applied to maritime communication.
5.1.2. Underwater VLC Communication for Remote Exploration and Monitoring
Underwater Visible Light Communication (VLC) is an emerging technology for remote exploration and monitoring in underwater environments. We outline the following challenges:
- Limited Range: Visible light has a limited range in water due to absorption and scattering. This restricts the range of VLC communication.
- Environmental Variability: Water conditions, such as turbidity and the presence of particles, can affect the performance of VLC.
- Alignment: Proper alignment between transmitters and receivers can be challenging in underwater VLC, especially for mobile and submerged devices.
5.1.3. Underwater Wireless Communications Assisted by Optical Intelligent Surface
Underwater wireless communications assisted by optical intelligent surfaces face the following challenges:
- Surface Design and Deployment: Designing and deploying intelligent surfaces in harsh underwater conditions can be challenging. These surfaces must withstand water turbulence, saltwater corrosion, and other environmental factors.
- Alignment and Synchronization: Ensuring proper alignment and synchronization between underwater devices and the OIS can be complex, particularly in mobile or deep-sea scenarios.
- Power Efficiency: Power-efficient designs are required to ensure that OIS can operate for extended durations.
- The vulnerable underwater channel interferes with the quality of underwater wireless communication.
- The development of high-speed and long-distance underwater wireless communication technology for smart oceans.
- Node mobility and equipment heterogeneity impairs the reliability of underwater networking.
- The exploration of a highly reliable and self-adaptive networking strategy for the large-scale perception of the UIoT.
Underwater wireless communication assisted by optical intelligent surfaces has the potential to revolutionize underwater data transmission and expand the capabilities of underwater devices.
5.2. Potential Solutions-Based 5G Methodologies to Underwater Network Challenges
Integrating underwater networks with 5G methodologies enhances the capabilities of underwater systems by enabling real-time processing, reducing latency and improving overall efficiency. This section presents 5G-based methods that would address channel characteristics, propagation loss, interference, energy efficiency, and sensor integration challenges in underwater networks. Table 9 summarizes the 5G solutions resulting from our literature review. These solutions are envisioned to address the above-mentioned challenges of IoUTs towards 5G-based underwater networks.
5.2.1. Potential Solutions for Channel Characteristics Challenge
- Spatial and Temporal DiversityTo manage the difficulties caused by multipath fading and changing channel conditions over time, integrate spatial and temporal variety to utilize various antennas at the sender and recipient terminals to adjust the fluctuating underwater conditions. A novel spatial-temporal correlation basis algorithm (SCBA) is introduced by Gu et al. [95] to lower transmission costs in 5G IoT networks. They also implemented an optimum basis algorithm (OBA) considering greedy scoring criteria.
- Channel Quality Indicator (CQI)By giving the BS information about the channel conditions, CQI allows it to modify coding and modulation. As a result, every device must notify the BS of its CQI regularly or periodically. The BS uses the CQI provided by the IoT device to select the modulation and coding scheme (MCS) [96,97]. According to Yin et al. [96], an online training module enhances the downlink scheduling of the 5G New Radio (NR) system to lessen the detrimental effects of obsolete CQI due to communication degradation.CQI serves as a solution for underwater networks due to its ability to assess and communicate the quality of the communication channel. In underwater environments, CQI provides a means to gauge the quality of the channel, considering factors like signal strength, noise, and interference. By incorporating CQI in underwater networks, it becomes possible to adapt communication strategies based on the real-time conditions of the channel. This adaptive approach helps mitigate the impact of environmental factors, improving communication’s reliability and efficiency. The CQI information enables dynamic adjustments, such as modulation and coding schemes, to optimize data transmission in response to changing underwater conditions.In summary, the CQI is valuable in underwater networks as it offers a mechanism to continuously evaluate and respond to the challenging and dynamic nature of the underwater communication environment.
- Massive MIMOBeamforming techniques, which use MIMO, improve the quality and strength of the signal in specific directions. Small cell base stations (SBSs) are used to determine their vicinity for stationary and barely movable nodes or devices in the underwater environment. Conversely, for higher mobility scenarios, the massive MIMO base station (MBS) spans large areas [98,99].MIMO systems use multiple antennas at both the transmitter and receiver ends, allowing for the creation of spatial diversity. This helps mitigate the effects of multipath fading, a common challenge in underwater communication. By leveraging multiple communication paths simultaneously, MIMO enhances signal quality and reliability. Massive MIMO systems are inherently adaptive and can dynamically adjust to these changing conditions, optimizing communication performance in real-time.
- Error Correction Coding with 5G-NR Low-Density Parity-CheckSeveral error-correcting codes, including Turbo and Low-Density Parity-Check (LDPC) codes, are used in 5G. The robustness of the communication against channel impairments depends on the error-correcting coding selection. Chatzoulis et al. [100] give a performance analysis of error correction coding for different propagation conditions. According to their study, turbo-based coding schemes are appropriate for small-frame 5G Vehicle-to-everything (V2X) services since they meet all QoS requirements and provide overall communication quality superior to LDPC and comparable to polar.LDPC codes, particularly those designed for 5G-NR, offer high error correction capability. They can effectively correct errors introduced by the challenging underwater environment, ensuring the integrity of transmitted data. LDPC codes are known for their adaptability to different channel conditions. This is crucial in underwater networks where timely and accurate data delivery is essential for applications such as environmental monitoring, navigation, and data collection.
5.2.2. Potential Solutions for Propagation Loss Challenge
- Energy-Efficient MIMO and Energy-Aware Routing ProtocolsMIMO techniques would enhance energy efficiency in underwater networks. Some solutions include exploring energy-conscious transmission strategies and implementing adaptive power control mechanisms. In UWANs, the communication process among sensor nodes relies on routing. The network scale influences energy conservation among sensor nodes, which is evaluated based on the communication volume to the base station. As a solution, Saleh et al. [102] introduce an energy-efficient routing protocol tailored for sparse networks. This protocol, named the ADOV-sparse Underwater Acoustic Routing Protocol (AODV-SUARP), is built upon the ad hoc on-demand distance vector (AODV) routing protocol. The simulation results indicate that AODV-SUARP surpasses AODV and VBF routing protocols in terms of both energy consumption and the number of packets received across different node counts. This holds particular significance underwater, where the intermittent connectivity and varying distances between nodes may render conventional energy-aware routing protocols suboptimal. Furthermore, an energy-efficient underwater communication mechanism is proposed by Majid et al. [104], aiming to enhance the energy efficiency of underwater sensors. This mechanism is tailored to the specific water depth layers of sensor locations, offering a personalized approach to optimize energy consumption in the aquatic environment.The combination of Energy-Efficient MIMO and Energy-Aware Routing Protocols aims to extend the operational lifetime of underwater networks by optimizing the use of limited energy resources. This is particularly important for environmental monitoring and surveillance applications, where continuous and reliable network operation is vital. Energy-Aware Routing Protocols are crucial in managing the communication paths within the underwater network. These protocols consider the energy levels of nodes and the distance to the destination, ensuring that energy is efficiently utilized. Energy-aware protocols contribute to overall network sustainability in 5G-underwater networks, where efficient routing is essential.
- Modulation Schemes (Phase Shift Keying, 16-QAM (Quadrature Amplitude Modulation), and 64-QAM)5G accommodates various modulation schemes, such as QPSK (Quadrature Phase Shift Keying), 16-QAM (Quadrature Amplitude Modulation), and 64-QAM. Modulation schemes of higher orders, like 256-QAM, are employed to achieve higher data rates but are more vulnerable to noise and necessitate improved channel conditions. Zhang et al. [106] present a modulation recognition system designed for identifying UWAC signals, leveraging higher-order cumulants and deep learning techniques even in non-cooperative conditions.Different modulation schemes provide options for adapting to varying channel conditions. For instance, lower-order modulations like QPSK may be more robust in the presence of noise and challenging underwater propagation conditions. In contrast, higher-order modulations can be employed in scenarios with better channel quality. Higher-order modulation schemes offer increased spectral efficiency, allowing more data to be transmitted in the same bandwidth. This efficiency is particularly valuable in underwater communication, where available bandwidth may be limited. The integration of advanced modulation recognition systems, such as those incorporating deep learning approaches, further enhances the adaptability of 5G modulation schemes in underwater environments. These systems can dynamically recognize and adjust to the changing conditions of the underwater channel.
5.2.3. Potential Solutions for Interference Challenge
- Flexible NumerologyThe latest 5G NR technology has introduced the concept of flexible numerology, meaning that the subcarrier spacing and symbol duration can be adjusted per channel conditions and service requirements. To address this issue, it has been suggested to pre-plan numerology profiles [107]. In the underwater network, it is proposed to explore the requirements and impairments present in the wireless communication scenario and build numerology profiles accordingly. Then, one of these profiles can be adopted based on the current underwater nodes/traffic pattern. To analyze the impact of numerology selection on the delay experienced at the radio link level for a remote-control service, a study has been proposed [108]. 5G has defined new numerologies and mini-slots that can help schedule faster and address fundamental problems like interference and multipath propagation.Flexible numerology allows for dynamic adjustments of subcarrier spacing, symbol duration, and other parameters to adapt to changing channel conditions. This adaptability enhances the robustness and reliability of communication. In addition, flexible numerology enables the customization of time and frequency resources, allowing for the optimization of communication parameters based on the application’s specific needs. This is crucial for real-time applications such as underwater surveillance or ROV control.
- Dynamic Spectrum Access and sharingDSA technology in 5G networks allows for the flexible allocation and adaptation of frequency bands based on current demand. With cognitive radio technologies, devices can intelligently select and utilize available frequencies to optimize spectrum utilization. On the other hand, DSS technology enables both 4G LTE and 5G NR technologies to coexist in the same frequency band, making for a smoother transition between the two without requiring a dedicated frequency band for each. This coexistence of 4G/5G wireless networks in scarce spectrum resources can be especially beneficial in underwater communication scenarios, where the networks can be leveraged for communication at the water’s surface, allowing underwater devices to connect with terrestrial networks when they surface. This connectivity supports mission planning and coordination for AUVs or robotic systems, where operators can remotely plan missions, update waypoints, and adjust parameters in realtime.
5.2.4. Potential Solutions for Energy Efficiency Challenge
The protocol can take into account not only energy metrics but also other QoS parameters. By considering factors like signal strength, transmission delay, and packet loss, an energy-aware routing protocol can optimize routes that meet specific QoS requirements, ensuring that applications receive the necessary level of service. Energy-aware routing protocols can adapt to these dynamic conditions, rerouting data through paths with optimal energy conditions based on real-time network status.
5.2.5. Potential Solutions for Sensor Integration
To improve the system’s efficiency, one can utilize the capabilities of 5G edge computing. This involves processing data closer to the source, which reduces the latency. Computational tasks can be divided between sensors and edge servers for optimal performance. Compared to terrestrial computing entities, underwater computing entities have been found to enhance network performance and reduce capital costs. A framework proposed by Ayodele et al. [111] suggests using edge computing for big data processing in underwater applications. Evaluation has shown that using a multi-mode automated teller machine (ATM) in terrestrial cloud computing can reduce the number of hops and latency by averages of 44.4% and 37.3%, respectively.
Edge computing in 5G networks enables the deployment of edge AI and machine learning models. This is valuable for sensor data analytics, pattern recognition, and decision-making directly at the edge, enabling intelligent responses to complex underwater scenarios without constant communication with a central processing unit.
6. Conclusions
Recently, the advent of IoT and its pervasive influence across various fields have extended its reach to both above and below the water’s surface. This technological progression has given rise to a novel scientific concept known as IoUT. IoUT encompasses a diverse array of marine sensors, cameras, and underwater hydrophones, marking the inception of numerous research avenues dedicated to underwater data acquisition, communication protocols, underwater wireless sensor networks, and underwater acoustic communications.
This paper serves as a valuable resource, mainly focusing on IoUT, with an emphasis on underwater network simulation tools that can be employed in academic settings, particularly by students. Notable examples of such tools include MatLab, GODUNOV, Riverbed Modeler, and COCO, which are open-source and benefit from extensive documentation and online tutorials, making them readily accessible for educational purposes. Additionally, IoUT in 5G-based systems targeted the practical deployment and monitoring of underwater systems to fulfill different requirements such as bit error rate, and spectral efficiency.
Author Contributions
Conceptualization, L.N. (Lewis Nkenyereye); methodology, L.N. (Lionel Nkenyereye); validation, L.N. (Lewis Nkenyereye) and L.N. (Lionel Nkenyereye); writing—original draft preparation, L.N. (Lionel Nkenyereye) and L.N. (Lewis Nkenyereye); and writing—review and editing, L.N. (Lewis Nkenyereye) and B.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare that there are no conflicts of interest.
References
- Eason, G.; Noble, B.; Sneddon, I.N. On certain integrals of Lipschitz-Hankel type involving products of Bessel functions. Phil. Trans. R. Soc. Lond. 1955, A247, 529–551. [Google Scholar]
- Eldefrawy, M.H.; Pereira, N.; Gidlund, M. Key distribution protocol for industrial Internet of Things without implicit certificates. IEEE Internet Things J. 2018, 6, 906–917. [Google Scholar] [CrossRef]
- Domingo, M.C. An overview of the internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890. [Google Scholar] [CrossRef]
- Saeed, N.; Alouini, M.-S.; Al-Naffouri, T.Y. Accurate 3-D localization of selected smart objects in optical internet of underwater things. IEEE Internet Things J. 2019, 7, 937–947. [Google Scholar] [CrossRef]
- Berlian, M.H.; Sahputra, T.E.R.; Ardi, B.J.W.; Dzatmika, L.W.; Besari, A.R.A.; Sudibyo, R.W.; Sukaridhoto, S. Design and implementation of smart environment monitoring and analytics in real-time system framework based on internet of underwater things and big data. In Proceedings of the 2016 International Electronics Symposium (IES), Denpasar, Indonesia, 29–30 September 2016; pp. 403–408. [Google Scholar]
- Kao, C.-C.; Lin, Y.-S.; Wu, G.-D.; Huang, C.-J. A comprehensive study on the internet of underwater things: Applications, challenges, and channel models. Sensors 2017, 17, 1477. [Google Scholar] [CrossRef] [PubMed]
- Qiu, T.; Zhao, Z.; Zhang, T.; Chen, C.; Chen, C.L.P. Underwater Internet of Things in Smart Ocean: System Architecture and Open Issues. IEEE Trans. Ind. Inform. 2020, 16, 4297–4307. [Google Scholar] [CrossRef]
- Ponraj, T.C.S.; Sukumaran, R.; Vignesh, S.R.; Manikandan, T.T.; Saravanan, M. Analysis on Simulation Tools for Underwater Wireless Sensor Networks (UWSNs). In Proceedings of the 2021 Third International Conference on Intelligent Communication Technologies and Virtual Mobile Networks (ICICV), Tirunelveli, India, 4–6 February 2021; pp. 207–211. [Google Scholar]
- Kaur, S.; Singh, P.; Tripathi, V.; Kaur, R. Recent trends in wireless and optical fiber communication. Glob. Transit. Proc. 2022, 3, 343–348. [Google Scholar] [CrossRef]
- Das, A.; Thampi, S. Simulation Tools for Underwater Sensor Networks: A Survey. Netw. Protoc. Algorithm 2017, 8, 471. [Google Scholar] [CrossRef]
- Martin, R.; Rajasekaran, S.; Peng, Z. Aqua-Sim Next Generation: An NS-3 Based Underwater Sensor Network Simulator. In Proceedings of the 12th International Conference on Underwater Networks & Systems, Halifax, NS, Canada, 6–8 November 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Schirripa, S.G.; Cozzella, L.; Leccese, F. Underwater Optical Wireless Communications: Overview. Sensors 2020, 20, 2261. [Google Scholar] [CrossRef]
- Cerqueira, R.; Trocoli, T.; Neves, G.; Joyeux, S.; Albiez, J.; Oliveira, L. A novel GPU-based sonar simulator for real-time applications. Comput. Graph. 2017, 68, 66–76. [Google Scholar] [CrossRef]
- Shin, S.; Park, S.-H. Omnet++ Based Simulation for Underwater Environment. In Proceedings of the 2008 IEEE/IFIP International Conference on Embedded and Ubiquitous Computing, Shanghai, China, 17–20 December 2008; Volume 2, pp. 689–694. [Google Scholar] [CrossRef]
- Zhang, Z.; Mi, W.; Du, J.; Wang, Z.; Wei, W.; Zhang, Y.; Yang, Y.; Ren, Y. Design and Implementation of a Modular UUV Simulation Platform. Sensors 2022, 22, 8043. [Google Scholar] [CrossRef] [PubMed]
- Sehgal, A.; Tumar, I.; Schönwälder, J. AquaTools–An Underwater Acoustic Networking Simulation Toolkit; Birzeit University Institutional: Bir Zeit, Palestine, 2010. [Google Scholar]
- Gorma, W.; Mitchell, P.; Morozs, N.; Zakharov, Y. CFDAMA-SRR: A MAC Protocol for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 60721–60735. [Google Scholar] [CrossRef]
- Su, Y.; Fan, R.; Fu, X.; Jin, Z. A DTN Supportive Network Simulator for Underwater Acoustic Sensor Networks. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Alablani, I.A.; Arafah, M.A. EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks. J. Mar. Sci. Eng. 2022, 10, 488. [Google Scholar] [CrossRef]
- Guerra, F.; Casari, P.; Zorzi, M. World ocean simulation system (WOSS): A simulation tool for underwater networks with realistic propagation modeling. In Proceedings of the 4th International Workshop on Underwater Networks, Berkeley, CA, USA, 3 November 2009; Volume 4. [Google Scholar] [CrossRef]
- Sathish, K.; Ravikumar, C.V.; Rajesh, A.; Pau, G. Underwater Wireless Sensor Network Performance Analysis Using Diverse Routing Protocols. J. Sens. Actuator Netw. 2022, 11, 64. [Google Scholar] [CrossRef]
- Signori, A.; Campagnaro, F.; Nissen, I.; Zorzi, M. Channel-Based Trust Model for Security in Underwater Acoustic Networks. IEEE Internet Things J. 2022, 9, 20479–20491. [Google Scholar] [CrossRef]
- Xu, J.; Kishk, M.A.; Alouini, M.-S. Space-Air-Ground-Sea Integrated Networks: Modeling and Coverage Analysis. IEEE Trans. Wirel. Commun. 2023, 22, 6298–6313. [Google Scholar] [CrossRef]
- Alsos, O.; Veitch, E.; Pantelatos, L.; Vasstein, K.; Eide, E.; Petermann, F.; Breivik, M. NTNU Shore Control Lab: Designing shore control centres in the age of autonomous ships. J. Phys. Conf. Ser. 2022, 2311, 012030. [Google Scholar] [CrossRef]
- Jahanbakht, M.; Xiang, W.; Hanzo, L.; Azghadi, M.R. Internet of underwater Things and big marine data analytics—A comprehensive survey. IEEE Commun. Surv. Tutorials 2021, 23, 904–956. [Google Scholar] [CrossRef]
- Kot, R. Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles. Electronics 2022, 11, 2301. [Google Scholar] [CrossRef]
- Kotis, K.; Stavrinos, S.; Kalloniatis, C. Review on Semantic Modeling and Simulation of Cybersecurity and Interoperability on the Internet of Underwater Things. Future Internet 2022, 15, 11. [Google Scholar] [CrossRef]
- Liou, E.-C.; Kao, C.-C.; Chang, C.-H.; Lin, Y.-S.; Huang, C.-J. Internet of underwater things: Challenges and routing protocols. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 1171–1174. [Google Scholar]
- Li, S.; Qu, W.; Liu, C.; Qiu, T.; Zhao, Z. Survey on high reliability wireless communication for underwater sensor networks. J. Netw. Comput. Appl. 2019, 148, 102446. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Li, W.; Jiang, T. Marine wireless big data: Efficient transmission, related applications, and challenges. IEEE Wirel. Commun. 2018, 25, 19–25. [Google Scholar] [CrossRef]
- Xu, G.; Shi, Y.; Sun, X.; Shen, W. Internet of things in marine environment monitoring: A review. Sensors 2019, 19, 1711. [Google Scholar] [CrossRef] [PubMed]
- Deivasigamani, M.; Gauni, S.; Manimegalai, C.; Kalimuthu, K. Challenges and vision of wireless optical and acoustic communication in underwater environment. Int. J. Commun. Syst. 2022, 35, 5227. [Google Scholar] [CrossRef]
- Kabanov, A.; Kramar, V. Marine Internet of Things Platforms for Interoperability of Marine Robotic Agents: An Overview of Concepts and Architectures. J. Mar. Sci. Eng. 2022, 10, 1279. [Google Scholar] [CrossRef]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater wireless sensor networks: A survey on enabling technologies, localization protocols, and internet of underwater things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Ali, M.F.; Jayakody, D.N.K.; Li, Y. Recent Trends in Underwater Visible Light Communication (UVLC) Systems. IEEE Access 2022, 10, 22169–22225. [Google Scholar] [CrossRef]
- Chen, W.; Li, C.; Yu, J.; Zhang, J.; Chang, F. A survey of maritime communications: From the wireless channel measurements and modeling perspective. Reg. Stud. Mar. Sci. 2021, 48, 102031. [Google Scholar] [CrossRef]
- Pons, M.; Valenzuela, E.; Rodríguez, B.; Nolazco-Flores, J.A.; Del-Valle-Soto, C. Utilization of 5G Technologies in IoT Applications: Current Limitations by Interference and Network Optimization Difficulties—A Review. Sensors 2023, 23, 3876. [Google Scholar] [CrossRef]
- Nomikos, N.; Gkonis, P.; Bithas, P.; Panagiotis, T. A Survey on AUV-Aided Maritime Communications: Deployment Considerations, Applications, and Future Challenges. IEEE Open J. Commun. Soc. 2022, 4, 56–78. [Google Scholar] [CrossRef]
- Dao, N.H.; Tu, N.H.; Thanh, T.T.; Bao, V.N.Q.; Na, W.; Cho, S. Neglected infrastructures for 6G—Underwater communications: How mature are they? J. Netw. Comput. Appl. 2023, 213, 103595. [Google Scholar] [CrossRef]
- Ali, M.F.; Jayakody, D.N.K.; Chursin, Y.A.; Affes, S.; Dmitry, S. Recent Advances and Future Directions on Underwater Wireless Communications. Arch. Comput. Methods Eng. 2019, 26, 1379–1412. [Google Scholar] [CrossRef]
- McMichael, C. Here Is How the US Government Is Developing 5G for Underwater Navy Sensors and Bomb Disposal on Land. Available online: https://www.businessinsider.com/us-government-and-scientists-use-5g-to-protect-the-environment-2022-12 (accessed on 7 January 2024).
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, S.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Menon, K.A.U.; Divya, P.; Ramesh, M.V. Wireless sensor network for river water quality monitoring in India. In Proceedings of the 2012 Third International Conference on Computing, Communication and Networking Technologies (ICCCNT’12), Coimbatore, India, 26–28 July 2012; pp. 1–7. [Google Scholar]
- Khan, A.; Jenkins, L. Undersea wireless sensor network for ocean pollution prevention. In Proceedings of the 2008 3rd International Conference on Communication Systems Software and Middleware and Workshops (COMSWARE’08), Bangalore, India, 6–10 January 2008; pp. 2–8. [Google Scholar]
- Alippi, C.; Camplani, R.; Galperti, C.; Roveri, M. A robust, adaptive, solar-powered WSN framework for aquatic environmental monitoring. IEEE Sens. J. 2010, 11, 45–55. [Google Scholar] [CrossRef]
- Saeed, H.; Ali, S.; Rashid, S.; Qaisar, S.; Felemban, E. Reliable monitoring of oil and gas pipelines using wireless sensor network (WSN)—REMONG. In Proceedings of the 2014 9th International Conference on System of Systems Engineering (SOSE), Glenelg, SA, Australia, 9–13 June 2014; pp. 230–235. [Google Scholar]
- Davis, A.; Chang, H. Underwater wireless sensor networks. In Proceedings of the 2012 Oceans, Yeosu, Republic of Korea, 21–24 May 2012; pp. 1–5. [Google Scholar]
- Srinivas, S.; Ranjitha, P.; Ramya, R.; Kumar Narendra, G. Investigation of oceanic environment using large-scale UWSN and UANETs. In Proceedings of the 2012 8th International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2012; pp. 1–5. [Google Scholar]
- Bainbridge, S.; Eggeling, D.; Page, G. Lessons from the field—Two years of deploying operational wireless sensor networks on the Great Barrier Reef. Sensors 2011, 11, 6842–6855. [Google Scholar] [CrossRef]
- Marin-Perez, R.; GarcÍA-Pintado, J.; GÓMez, A.S. A real-time measurement system for long-life flood monitoring and warning applications. Sensors 2012, 12, 4213–4236. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, P.; Priyadarshini, P.; Srija. Underwater acoustic sensor network for early warning generation. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–6. [Google Scholar]
- Casey, K.; Lim, A.; Dozier, G. A sensor network architecture for tsunami detection and response. Int. J. Distrib. Sens. Netw. 2008, 4, 27–42. [Google Scholar] [CrossRef]
- Manjula, R.B.; Manvi, S.S. Coverage optimization based sensor deployment by using PSO for anti-submarine detection in UWASNs. In Proceedings of the 2013 Ocean Electronics (SYMPOL), Kochi, India, 23–25 October 2013; pp. 15–22. [Google Scholar]
- Khaledi, S.; Mann, H.; Perkovich, J.; Zayed, S. Design of an underwater mine detection system. In Proceedings of the 2014 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 25 April 2014; pp. 78–83. [Google Scholar]
- Cayirci, E.; Tezcan, H.; Dogan, Y.; Coskun, V. Wireless sensor networks for underwater survelliance systems. Ad Hoc Netw. 2006, 4, 431–446. [Google Scholar] [CrossRef]
- de Magalhaes, F.A.; Vannozzi, G.; Gatta, G.; Fantozzi, S. Wearable inertial sensors in swimming motion analysis: A systematic review. J. Sport. Sci. 2015, 33, 732–745. [Google Scholar] [CrossRef]
- Waldmeyer, M.; Tan, H.-P.; Seah, W.K.G. Multi-stage AUV-aided localization for underwater wireless sensor networks. In Proceedings of the 2011 IEEE Workshops of International Conference on Advanced Information Networking and Applications, Biopolis, Singapore, 22–25 March 2011; pp. 908–913. [Google Scholar]
- Guo, Y.; Liu, Y. Localization for anchor-free underwater sensor networks. Comput. Electr. Eng. 2013, 39, 1812–1821. [Google Scholar] [CrossRef]
- Gite, P.; Shrivastava, A.; Krishna, K.M.; Kusumadevi, G.H.; Dilip, R.; Potdar, R.M. Under water motion tracking and monitoring using wireless sensor network and Machine learning. Mater. Today Proc. 2023, 80, 3511–3516. [Google Scholar] [CrossRef]
- Alawode, B.; Dharejo, F.A.; Ummar, M.; Guo, Y.; Mahmood, A.; Werghi, N.; Khan, F.S.; Matas, J.; Javed, S. Improving Underwater Visual Tracking With a Large Scale Dataset and Image Enhancement. arXiv 2023, arXiv:2308.15816. [Google Scholar]
- Yang, P.; Wu, H.; He, C.; Luo, S. Underwater image restoration for seafloor targets with hybrid attention mechanisms and conditional generative adversarial network. Digit. Signal Process. 2023, 134, 103900. [Google Scholar] [CrossRef]
- Okereke, C.E.; Mohamad, M.M.; Wahab, N.H.A.; Elijah, O.; Al-Nahari, A.; Zaleha, S.H. An Overview of Machine Learning Techniques in Local Path Planning for Autonomous Underwater Vehicles. IEEE Access 2023, 11, 24894–24907. [Google Scholar] [CrossRef]
- Lin, X.-H.; Bi, S.; Cheng, N.; Dai, M.; Su, G.; Fu, Z.; Wang, H. Joint Optimization of Resource Allocation and Flight Trajectory for UAV-IoT Underwater Detecting Systems. IEEE Trans. Veh. Technol. 2023, 72, 16482–16498. [Google Scholar] [CrossRef]
- Cecchinato, N.; Toma, A.; Drioli, C.; Oliva, G.; Sechi, G.; Foresti, G.L. Secure Real-Time Multimedia Data Transmission from Low-Cost UAVs with A Lightweight AES Encryption. IEEE Commun. Mag. 2023, 61, 160–165. [Google Scholar] [CrossRef]
- Kurdi, M.M.; Dadykin, A.K.; Elzein, I.A. Proposed encryption method of quadcopter’s video transmitted to underwater robot by using block packet Cipher. In Proceedings of the 2017 International Symposium ELMAR, Zadar, Croatia, 18–20 September 2017; pp. 209–213. [Google Scholar] [CrossRef]
- Mary, D.R.K.; Ko, E.; Kim, S.-G.; Yum, S.-H.; Shin, S.-Y.; Park, S.-H. A Systematic Review on Recent Trends, Challenges, Privacy and Security Issues of Underwater Internet of Things. Sensors 2021, 21, 8262. [Google Scholar] [CrossRef] [PubMed]
- Gavali, R.; Kadam, M.; Patil, R. Energy Optimization using Swarm Intelligence for IoT-Authorized Underwater Wireless Sensor Networks. Microprocess. Microsyst. 2022, 93, 104597. [Google Scholar] [CrossRef]
- Sathish, K.; Ravikumar, C.; Srinivasulu, A.; Gupta, A. Performance Analysis of Underwater Wireless Sensor Network by Deploying FTP, CBR, and VBR as Applications. J. Comput. Netw. Commun. 2022, 2022, 707. [Google Scholar] [CrossRef]
- Soumadeep, D.; Aryan, M.P.; Prosanta, G.; Clark, J.A.; Chintan, P.; Biplab, S. AIDPS: Adaptive Intrusion Detection and Prevention System for Underwater Acoustic Sensor Networks. IEEE/ACM Trans. Netw. 2023, 1–16. [Google Scholar] [CrossRef]
- Hussain, A.; Hussain, T.; Ullah, I.; Muminov, B.; Khan, M.; Alfarraj, O.; Gafar, A. CR-NBEER: Cooperative-Relay Neighboring-Based Energy Efficient Routing Protocol for Marine Underwater Sensor Networks. J. Mar. Sci. Eng. 2023, 11, 1474. [Google Scholar] [CrossRef]
- Ponraj, T.C.S.; Sukumaran, R.; Vignesh, S.R.; Saravanan, M.; Manikandan, T.T.; Radhakrishnan, M. Stochastic Network Calculus for Network Function Virtualization in Underwater Wireless Sensor Networks. In Proceedings of the 2022 First International Conference on Electrical, Electronics, Information and Communication Technologies (ICEEICT), Trichy, India, 16–18 February 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Pourkabirian, A.; Kooshki, F.; Anisi, H.; Jindal, A. An Accurate RSS/AoA-based Localization Method for Internet of Underwater Things. Ad Hoc Netw. 2023, 145, 103177. [Google Scholar] [CrossRef]
- Diwan, S. A Multi-Layered Energy Efficient Approach for Performance Aware Internet of Ocean Things. Int. J. Interact. Mob. Technol. (iJIM) 2022, 16, 88–100. [Google Scholar] [CrossRef]
- Pei, J.; Liu, W.; Wang, L.; Liu, C.; Bashir, A.K.; Wang, Y. Fed-IoUT: Opportunities and Challenges of Federated Learning in the Internet of Underwater Things. IEEE Internet Things Mag. 2023, 6, 108–112. [Google Scholar] [CrossRef]
- Omeke, K.G.; Abubakar, A.I.; Zhang, L.; Abbasi, Q.H.; Imran, M.A. How Reinforcement Learning is Helping to Solve Internet-of-Underwater-Things Problems. IEEE Internet Things Mag. 2022, 5, 24–29. [Google Scholar] [CrossRef]
- Yan, L.; He, T.; Wang, Y.; Zhang, R.; Li, X. Hybrid Geographical Routing Protocol for Internet of Underwater Things. J. Electron. Inf. Technol. 2022, 44, 1966–1973. [Google Scholar] [CrossRef]
- Zainab, T.; Karstens, J.; Landsiedel, O. Cross-domain fusion in smart seafloor sensor networks. Informatik Spektrum 2022, 45, 290–294. [Google Scholar] [CrossRef]
- Taneja, A.; Rani, S.; Raza, S.; Jain, A.; Sefat, S. Energy efficient IRS assisted 6G network for Industry 5.0. Sci. Rep. 2023, 13, 12814. [Google Scholar] [CrossRef]
- Sayed, A.; Ahmed, E.; Saeed, R.; Eltahir, I.; Abdelhaq, M.; Alsaqour, R.; Mokhtar, R. Energy Efficient CH Selection Scheme Based on ABC and Q-Learning Approaches for IoUT Applications. Systems 2023, 11, 529. [Google Scholar] [CrossRef]
- Jadav, N.K.; Nair, A.; Gupta, R.; Tanwar, S.; Alabdulatif, A. Blockchain-Assisted Onion Routing Protocol for Internet of Underwater Vehicle Communication. IEEE Internet Things Mag. 2022, 5, 30–35. [Google Scholar] [CrossRef]
- Gao, Z. Research on Information Sensing and Transmitting Technology for Island Using 5G System. In Proceedings of the 2022 IEEE 2nd International Conference on Electronic Technology, Communication and Information (ICETCI), Changchun, China, 27–29 May 2022; pp. 868–871. [Google Scholar] [CrossRef]
- Zhu, L.; Yao, H.; Chang, H.; Tian, Q.; Zhang, Q.; Xin, X.; Yu, F.R. Adaptive Optics for Orbital Angular Momentum-Based Internet of Underwater Things Applications. IEEE Internet Things J. 2022, 9, 24281–24299. [Google Scholar] [CrossRef]
- Ali, M.F.; Jayakody, D.N.K.; Garg, S.; Kaddoum, G.; Hossain, M.S. Dual-Hop Mixed FSO-VLC Underwater Wireless Communication Link. IEEE Trans. Netw. Serv. Manag. 2022, 19, 3105–3120. [Google Scholar] [CrossRef]
- Shin, H.; Kim, S.M.; Song, Y. Learning-Aided Joint Beam Divergence Angle and Power Optimization for Seamless and Energy-Efficient Underwater Optical Communication. IEEE Internet Things J. 2023, 10, 22726–22739. [Google Scholar] [CrossRef]
- Zhou, L.; Zhu, Y.; Zheng, W. Analysis and Simulation of Link Performance for Underwater Wireless Optical Communications. EAI Endorsed Trans. Wirel. Spectrum. 2017, 3, 153467. [Google Scholar] [CrossRef]
- Petroni, A.; Ko, H.-L.; Im, T.; Cho, Y.-H.; Cusani, R.; Scarano, G.; Biagi, M. Hybrid Space-Frequency Access for Underwater Acoustic Networks. IEEE Access 2022, 10, 23885–23901. [Google Scholar] [CrossRef]
- Huang, L.; Wang, Y.; Zhang, Q.; Han, J.; Tan, W.; Tian, Z. Machine Learning for Underwater Acoustic Communications. IEEE Wirel. Commun. 2022, 29, 102–108. [Google Scholar] [CrossRef]
- Jakubisin, D.J.; Schutz, Z.; Davis, B. Resilient Underwater Acoustic Communications in the Presence of Interference and Jamming. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Coccolo, E.; Delea, C.; Steinmetz, F.; Francescon, R.; Signori, A.; Au, C.N.; Campagnaro, F.; Schneider, V.; Favaro, F.; Oeffner, J.; et al. System Architecture and Communication Infrastructure for the RoboVaaS Project. IEEE J. Ocean. Eng. 2023, 48, 716–739. Available online: http://hdl.handle.net/11420/14962 (accessed on 7 January 2024). [CrossRef]
- Bushnaq, O.M.; Zhilin, I.V.; Masi, G.D.; Natalizio, E.; Akyildiz, I.F. Automatic Network Slicing for Admission Control, Routing, and Resource Allocation in Underwater Acoustic Communication Systems. IEEE Access 2022, 10, 134440–134454. [Google Scholar] [CrossRef]
- Hu, X.; Huo, Y.; Dong, X.; Wu, F.-Y.; Huang, A. Channel Prediction Using Adaptive Bidirectional GRU for Underwater MIMO Communications. IEEE Internet Things J. 2023, 11, 3250–3263. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, Y.; Chen, X.; Jiang, P.; Li, S.; Hu, Y. Research on Adaptive Transmit Diversity Strategy for Reducing Interference in Underwater Optical Multi-Beam Non-Orthogonal Multiple Access Systems. Photonics 2023, 10, 1152. [Google Scholar] [CrossRef]
- Firouzabadi, A.D.; Mellah, H.; Manzanilla-Salazar, O.; Khalvi, R.; Therrien, V.; Boutin, V.; Sansò, B. PIoT: A Performance IoT Simulation System for a Large-Scale City-Wide Assessment. IEEE Access 2023, 11, 56273–56286. [Google Scholar] [CrossRef]
- Clemente, D.; Cabral, T.; Santos, P.; Taveira-Pinto, F. Blue Seaports: The Smart, Sustainable and Electrified Ports of the Future. Smart Cities 2023, 6, 1560–1588. [Google Scholar] [CrossRef]
- Gu, X.; Zhu, M.; Zhuang, L. Highly Efficient Spatial–Temporal Correlation Basis for 5G IoT Networks. Sensors 2021, 21, 6899. [Google Scholar] [CrossRef] [PubMed]
- Yin, H.; Guo, X.; Liu, P.; Hei, X.; Gao, Y. Predicting Channel Quality Indicators for 5G Downlink Scheduling in a Deep Learning Approach. arXiv 2020, arXiv:2008.01000. [Google Scholar]
- Han, N.; Kim, I.-M.; So, J. Lightweight LSTM-Based Adaptive CQI Feedback Scheme for IoT Devices. Sensors 2023, 23, 4929. [Google Scholar] [CrossRef]
- Amrallah, A.; Mohamed, E.M.; Tran, G.K.; Sakaguchi, K. Enhanced Dynamic Spectrum Access in UAV Wireless Networks for Post-Disaster Area Surveillance System: A Multi-Player Multi-Armed Bandit Approach. Sensors 2021, 21, 7855. [Google Scholar] [CrossRef]
- Kim, Y.; Jang, P.; Han, J.; Shin, H.; Ahn, S.; Kwon, D.; Choi, J.; Kang, S.; Heo, S.; Cho, T.B.; et al. An RF receiver for multi-band inter- and intra-band carrier aggregation. In Proceedings of the 2016 IEEE Radio Frequency Integrated Circuits Symposium (RFIC), San Francisco, CA, USA, 22–24 May 2016; pp. 79–82. [Google Scholar] [CrossRef]
- Chatzoulis, D.; Chaikalis, C.; Kosmanos, D.; Anagnostou, K.E.; Xenakis, A. 3GPP 5G V2X Error Correction Coding for Various Propagation Environments: A QoS Approach. Electronics 2023, 12, 2898. [Google Scholar] [CrossRef]
- Meenalakshmi, M.; Chaturvedi, S.; Dwivedi, V.K. Enhancing channel estimation accuracy in polar-coded MIMO–OFDM systems via CNN with 5G channel models. AEU Int. J. Electron. Commun. 2024, 173, 155016. [Google Scholar] [CrossRef]
- Saleh, M.H.; Takruri, H.; Linge, N. Energy aware routing protocol for sparse underwater acoustic wireless sensor network. In Proceedings of the 2022 13th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2022; pp. 750–755. [Google Scholar] [CrossRef]
- Ren, Q.; Sun, Y.; Wang, T.; Zhang, B. Energy-Efficient Cooperative MIMO Formation for Underwater MI-Assisted Acoustic Wireless Sensor Networks. Remote Sens. 2022, 14, 3641. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, X.; Wang, B.; Sun, W.; Du, H.; Zhao, Y. Energy-Efficient Data Transmission for Underwater Wireless Sensor Networks: A Novel Hierarchical Underwater Wireless Sensor Transmission Framework. Sensors 2023, 23, 5759. [Google Scholar] [CrossRef]
- Wei, M.; Li, X.; Xie, W.; Hu, C. Practical Performance Analysis of Interference in DSS System. Appl. Sci. 2023, 13, 1233. [Google Scholar] [CrossRef]
- Zhang, R.; He, C.; Jing, L.; Zhou, C.; Long, C.; Li, J. A Modulation Recognition System for Underwater Acoustic Communication Signals Based on Higher-Order Cumulants and Deep Learning. J. Mar. Sci. Eng. 2023, 11, 1632. [Google Scholar] [CrossRef]
- Correia, N.; Al-Tam, F.; Rodriguez, J. Optimization of Mixed Numerology Profiles for 5G Wireless Communication Scenarios. Sensors 2021, 21, 1494. [Google Scholar] [CrossRef] [PubMed]
- Segura, D.; Khatib, E.J.; Munilla, J.; Barco, R. 5G Numerologies Assessment for URLLC in Industrial Communications. Sensors 2021, 21, 2489. [Google Scholar] [CrossRef]
- Nguyen, L.D.; Tuan, H.D.; Duong, T.Q.; Dobre, O.A.; Poor, H.V. Downlink Beamforming for Energy-Efficient Heterogeneous Networks With Massive MIMO and Small Cells. IEEE Trans. Wirel. Commun. 2018, 17, 3386–3400. [Google Scholar] [CrossRef]
- Ren, Q.; Sun, Y.; Li, S.; Zhang, L.; Sun, Z. On Connectivity of Wireless Underwater Sensor Networks Using MI-assisted Acoustic Distributed Beamforming. In Proceedings of the 14th International Conference on Underwater Networks & Systems (WUWNet’19), Atlanta, GA, USA, 23–25 October 2019; Association for Computing Machinery: New York, NY, USA; pp. 1–5. [Google Scholar] [CrossRef]
- Ayodele, P.; Alonge, A.; Ogudo, K.A. Edge computing for big data processing in underwater applications. Wirel. Netw. 2022, 28, 2255–2271. [Google Scholar] [CrossRef]
Figure 1.
Architecture of Internet of Underwater Things.

Figure 2.
Functional layers of the IoUT Architecture as proposed by [3].
Figure 2.
Functional layers of the IoUT Architecture as proposed by [3].

Figure 3.
Model of IoUT with its type of communication networks [7].
Figure 3.
Model of IoUT with its type of communication networks [7].

Figure 4.
Schematic diagram of 5G cellular topology of hybrid underwater acoustic wave/wireless light/optical communication and AUVs systems.
Figure 4.
Schematic diagram of 5G cellular topology of hybrid underwater acoustic wave/wireless light/optical communication and AUVs systems.

Figure 5.
The underwater application architecture using UUVs systems.

Figure 6.
Use case for harbor security scenario [3].
Figure 6.
Use case for harbor security scenario [3].

Figure 7.
Wormhole attack in IoUTs [66].
Figure 7.
Wormhole attack in IoUTs [66].

Figure 8.
IoUT applications domain.

Figure 9.
Shore-based control centers.

Figure 10.
Web service for monitoring underwater environment in the RoboVaaS Project.

| Simulators | Developed Languages | Awareness of Energy | Simple of Utilization | Easy for Use | Open-Source |
|---|---|---|---|---|---|
| SUNSET | NS2, NSMiracle | P | P | G | Y |
| DESERT | C, C++, and NS2, NS-Miracle | L | G | G | Y |
| NS2 | C, C++, and oTcl | L | P | G | Y |
| Aqua Net | NS2 | L | L | Gen | Y |
| SeaLinx | Embedded C | G | G | Gen | N/A |
| Aquanet-mate | NS | G | G | G | Y |
| WOSS | C++ Libraries | P | P | G | Y |
| OPNET | Proto C | G | P | G | N |
| SUNRISE | NS2, NSMiracle | P | P | G | Y |
| NSMiracle | C, C++, and oTcl | L | P | G | Y |
| Aqua-sim | NS2 | L | G | Gen | Y |
| Aqua-lab | NS2, PHP, and XML Java script Ajax | G | G | G | N/A |
| Aqua-glomo | PARSEC | G | G | G | Y |
| RECORDS | Script | G | P | G | Y |
| UWsim | .Net and C# | L | L | Gen | Y |
| Aqua Tune | Small Kayak | P | L | G | Y |
| Aqua Tools | NS2 | L | G | Gen | Y |
| COCO | C++ | P | P | P | Y |
| NS | Tel. C++ | L | G | G | Y |
| QualNet | C++ | L | G | G | N |
| NetSim | Java | L | G | G | N |
| OMNet++ | C++ | G | G | P | Y |
| Java Simulator | Tel. Java | L | G | G | Y |
| MatLab | C/C++ | P | P | P | Y |
| AUVNetSim | Python | L | Gen | G | Y |
| USNet | C++ | P | G | G | N/A |
| UWSim | C++ | P | G | G | Y |
P = Perfect, L = Low, G = Good, Y = Yes, No = N, N/A = Not Available, and Gen = General.
Table 3.
Summary of UWSNs with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Aspect |
|---|---|---|---|---|
| [67] | Routing solution for energy and QoS efficient | Effective Fitness Function-based Particle Swarm Optimization (EFF-PSO) | Aqua Sim | High data rate |
| [68] | Monitor and record the physical and environmental parameters | Waypoint mobility protocol for CBR and VBR | QualNet7.1 | Low latency |
| [69] | Security and intrusion detection | Security scheme and vector-based forward routing protocol | Ns-2 AquaSim | Security improvement |
| [19] | Energy and prolong life time of UWSNs | Energy-efficient protocol for UWSNs (EE-UWSNs) protocol | UAVNetSim | Higher data rate |
| [70] | Node deployment and relay optimization | Cooperative-Relay Neighboring-Based Energy-Efficient Routing | MatLab | Enhanced Connectivity |
| [12] | Higher utilization and data transmission | The source-tree adaptive routing-least overhead routing approach (STAR-LORA) protocol | QualNet7.1 | Higher data and enhanced connectivity |
| [71] | Service provisioning with network function virtualization | Non-bursty and bursty type of traffic of UWSN through virtual network function nodes | MatLab | Reliability and resource efficiency |
| [32] | Prediction of natural disasters; marine environment; and monitoring aquatic life | Various modes of communication, architectures, and protocol layers involved in underwater communication | N/A | Higher data rate |
Table 4.
Summary of IoUTs with 5G and simulation tools for evaluation.
| Ref. | Application/Issue | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [72] | Localization | Semidefinite programming (SDP)-based method | MatLab | Remote management and control |
| [73] | Ocean-based environment, which is impacted by the ocean’s temperature | The proposed approach is making use of a multi-hop and metaheuristic-based approach for the effectiveness and overall performance of IoUT | MatLab | Massive device connectivity |
| [74] | Data privacy protection, low communication overhead | Water quality monitoring, underwater life detection, flood forecasting, underwater detection, and marine energy transfer | N/A | Security, remote management, and control |
| [75] | ML to create sustainable marine ecosystem | The applications of RL in IoUTs | N/A | Low latency, reliability, and robustness |
| [76] | Geographical routing protocol | A Hybrid G-STAR (H-G-STAR) routing protocol | MatLab | Enhanced data rate, massive device connectivity |
| [77] | Resource efficiency | Distributed neural networks as data-analytics pipelines | MatLab | Network slicing, reliability, and robustness |
| [78] | The energy efficiency with IRS -enabled network | IRS-assisted energy constrained 6G wireless networks | MatLab | Reliability and robustness, energy efficiency |
| [79] | Network clustering approach | Uniform distribution of CHs based on artificial bee colony | N/A | Enhanced data rate, low latency |
Table 5.
Summary of UUVNs with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [38] | Survey presents the state-of-the-art in AUV-aided maritime communications, | Review | N/A | N/A |
| [80] | Provision of broadband, low-delay, and reliable wireless coverage | Proposed an intelligent collaborative framework by amalgamating artificial intelligence (AI) and onion routing (OR) in the IoUV environment | Mininet | Network slicing, higher data rate |
| [26] | Path planning in real time | To provide a structured review of simulations and practical implementations of collision-avoidance and path-planning algorithms in AUVs | N/A | N/A |
| [27] | Swarm formations, towards obtaining deeper insights related to the critical issues of cybersecurity and interoperability | The modeling and simulation of UUVs’ collaboration | N/A | Security |
| [81] | The monitoring efficiency of the system and analysis data transmission | A comprehensive study of MIoT applications, challenges, and architectures | N/A | N/A |
| [23] | Derive the coverage probability (CP) of users who are annotated as surface stations (SSs) | Structure of Space-Air-Ground-Sea integrated networks (SAGSINs) | Monte-Carlo | Reliable communication |
| [33] | Platform must first be defined to use a unified approach to data exchange | This article provides an overview of approaches to determining the architectures of network underwater and marine communication systems based on the concept of the Internet of Things | N/A | N/A |
Table 6.
Summary of UOWNs with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [82] | Underwater-turbulence- induced scintillation | Present a comprehensive performance comparison against state-of-the-art phaseless wave-front sensing techniques | N/A | Reliable communication |
| [83] | UVLC system under the intensity modulation/direct detection (IM/DD) | Combine the analytical expressions that present an efficient tool to depict the impact of channel parameters on the system | Monte Carlo approach | Higher data rate |
| [84] | Optical beam between the transmitter and receiver for point-to-point (P2P) | Acoustic and optical communications are used for low-rate control data transmission and high-rate sensing data transmission | MatLab | Energy efficiency, reliable communication |
| [85] | Modulation on dynamical chaos | Considered modulation methods (COOK and switching of chaotic modes) in combination with the correlation processing of the signal at the physical level | MatLab | Reliable communication |
Table 7.
Summary of UAWNs with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [22] | Identify possible attackers in the network | A trust model based on the knowledge of the channel state | DESERT Underwater Network | Security |
| [86] | Communication resources management | Novel hybrid multiple access technique with bi-dimensional resources domain | MatLab | Reliable communication |
| [87] | Link-reliable underwater acoustic communication | ML-based solutions for UAC by adaptive modulation and coding (AMC) | Survey | Low latency |
| [88] | Power efficiency waveforms and modulation | Modulation scheme on the resiliency in the presence of channel impairments | MatLab | Higher data rate, low latency |
| [89] | Bathymetry and environmental data collection tasks | Proof of concept of the system design for technical feasibility | practical setup | Remote operations and control, reliable communication |
| [90] | Global resource administration | Algorithm for inadequate sending and allocation of resources through SLA | N/A | Higher data rate |
Table 8.
Summary of UVLC with 5G and simulation tools for evaluation.
| Ref. | Application/Challenge | Contribution | Simulation Tools | 5G Key Aspect |
|---|---|---|---|---|
| [24] | Autonomous ships and their monitoring and control | The research infrastructure’s purpose and scope of operation, as well as the technical design and physical setup | N/A | Higher data rate |
| [91] | Channel information without additional knowledge | A novel efficient channel impulse response (CIR) prediction model for UWA MIMO communications | N/A | Reliable communication |
| [92] | Access capacity of a traditional multi-antenna communication | An algorithm for adaptive selection and merging beams based on the degree of interference between beams in space, which merges LED beams with high interference | MatLab | Higher data rate, reliable communication |
| [93] | Network performance | PIoT as an on-going academic simulator project | PIoT | Remote control |
| [94] | Hubs for maritime logistics and the transportation of goods and people, as well as the energy demands of seaports | Identify pioneering smart seaports in the fields of automation, realtime management, connectivity, and accessibility control | N?A | Remote control |
| [35] | Potential wireless carrier candidate for signal transmission in highly critical, unknown, and acrimonious water | Comprehensive survey of recent advancements in UVLC implementations to cope with optical signal propagation issues | N/A | Low latency |
Table 9.
Summary of 5G-based solutions on the challenges of IoUTs.
| SN | Challenges | Potential Solutions | 5G Aspect |
|---|---|---|---|
| 1 | Channel characteristics |
| High data rate |
| 2 | Propagation loss | Low latency | |
| 3 | Interference | Interference and handsoff management | |
| 4 | Energy efficiency |
| Ubiquitous connectivity |
| 5 | Sensor integration |
| Scalability and QoS |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Nkenyereye, L.; Nkenyereye, L.; Ndibanje, B. Internet of Underwater Things: A Survey on Simulation Tools and 5G-Based Underwater Networks. Electronics 2024, 13, 474. https://doi.org/10.3390/electronics13030474
AMA Style
Nkenyereye L, Nkenyereye L, Ndibanje B. Internet of Underwater Things: A Survey on Simulation Tools and 5G-Based Underwater Networks. Electronics. 2024; 13(3):474. https://doi.org/10.3390/electronics13030474
Chicago/Turabian StyleNkenyereye, Lewis, Lionel Nkenyereye, and Bruce Ndibanje. 2024. "Internet of Underwater Things: A Survey on Simulation Tools and 5G-Based Underwater Networks" Electronics 13, no. 3: 474. https://doi.org/10.3390/electronics13030474
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.