
Nozzle Jet Deviation from Bucket Pitch Circle’s Effect on the Stability and Efficiency of Pelton Turbine
 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Two-Phase Flow Model
2.2. Basic Control Equations
2.3. Turbulence Model
3. Water Model and Boundary Conditions of the Computational Domain
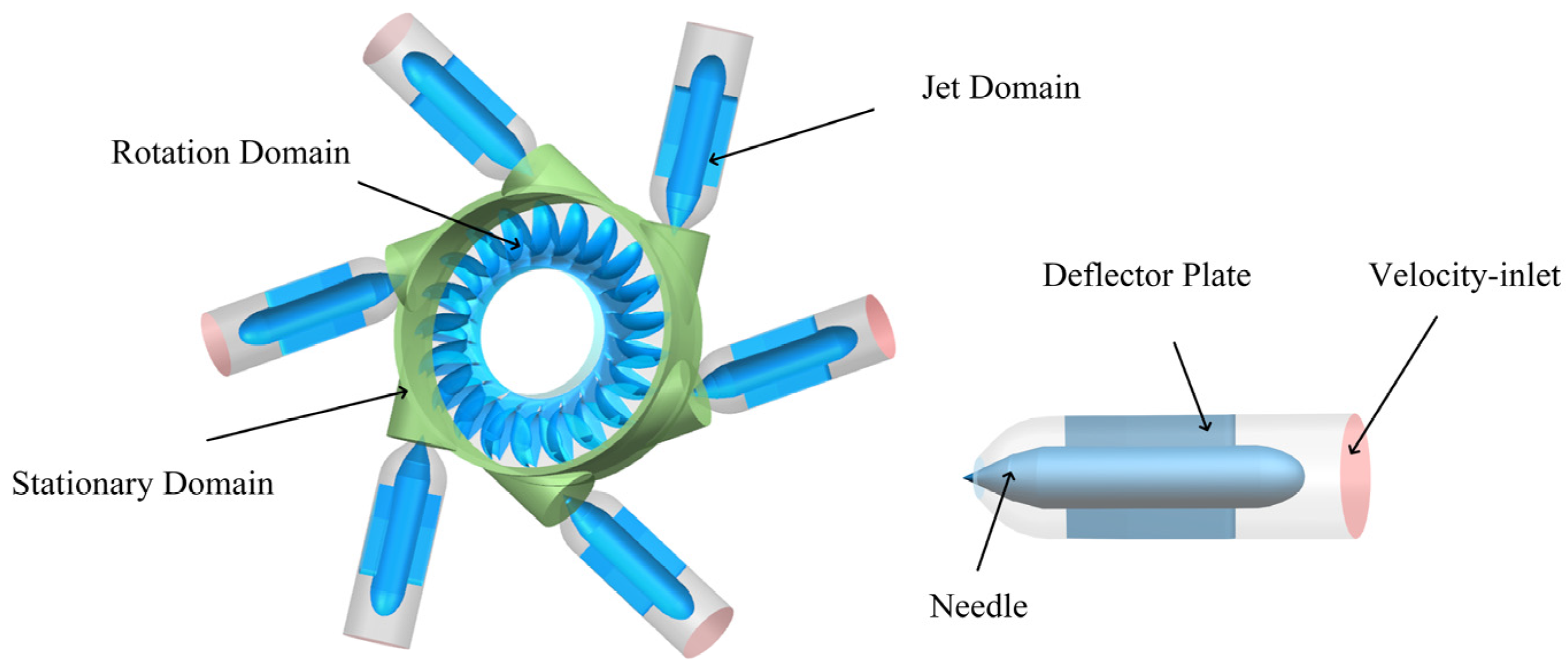
3.1. Establishment of Three-Dimensional Water Model of Overflow Components
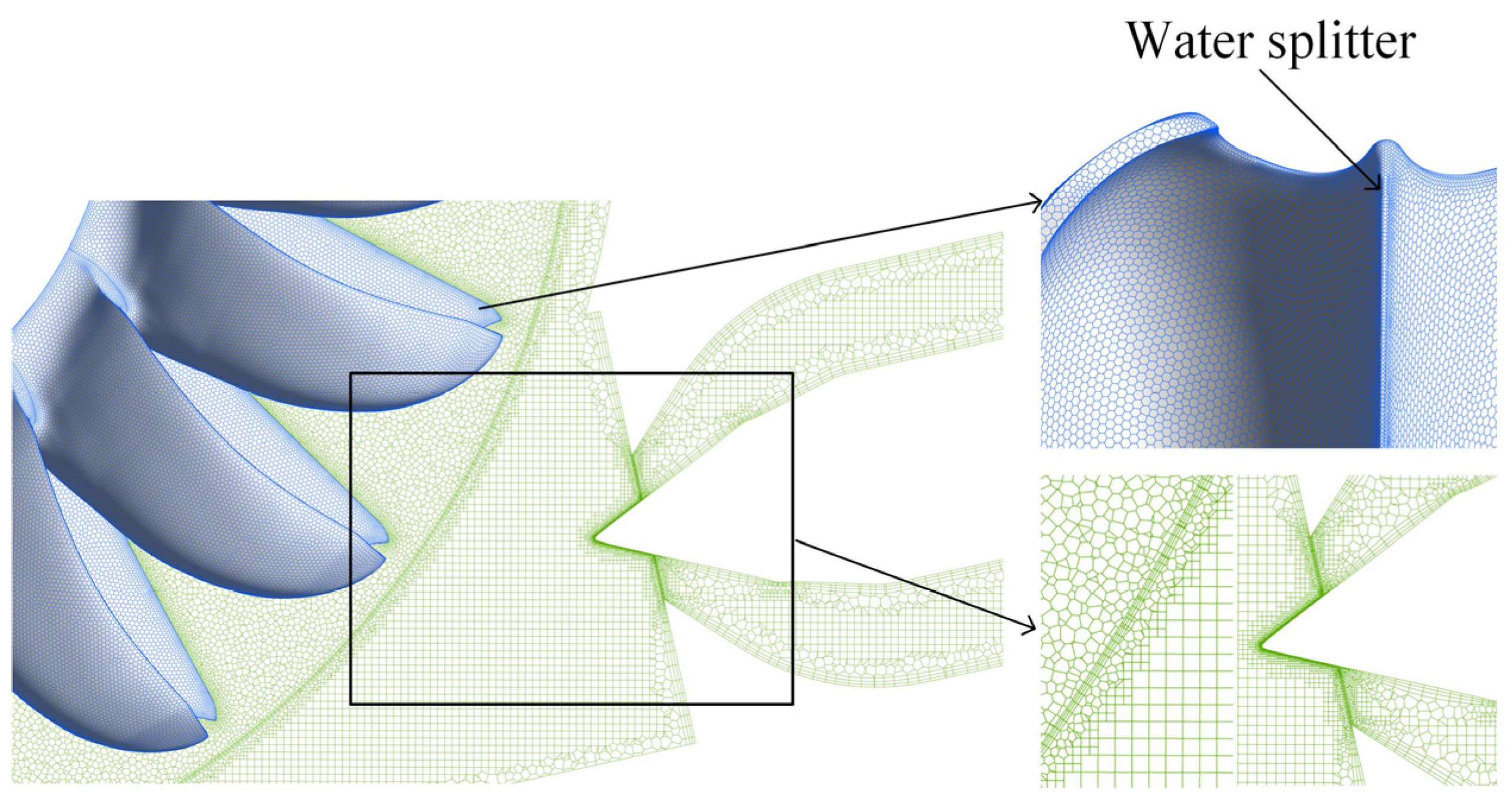
3.2. Computational Meshing and Irrelevance Validation
3.3. Boundary Condition Setting
4. Flow Calculation and Stability and Efficiency Analysis
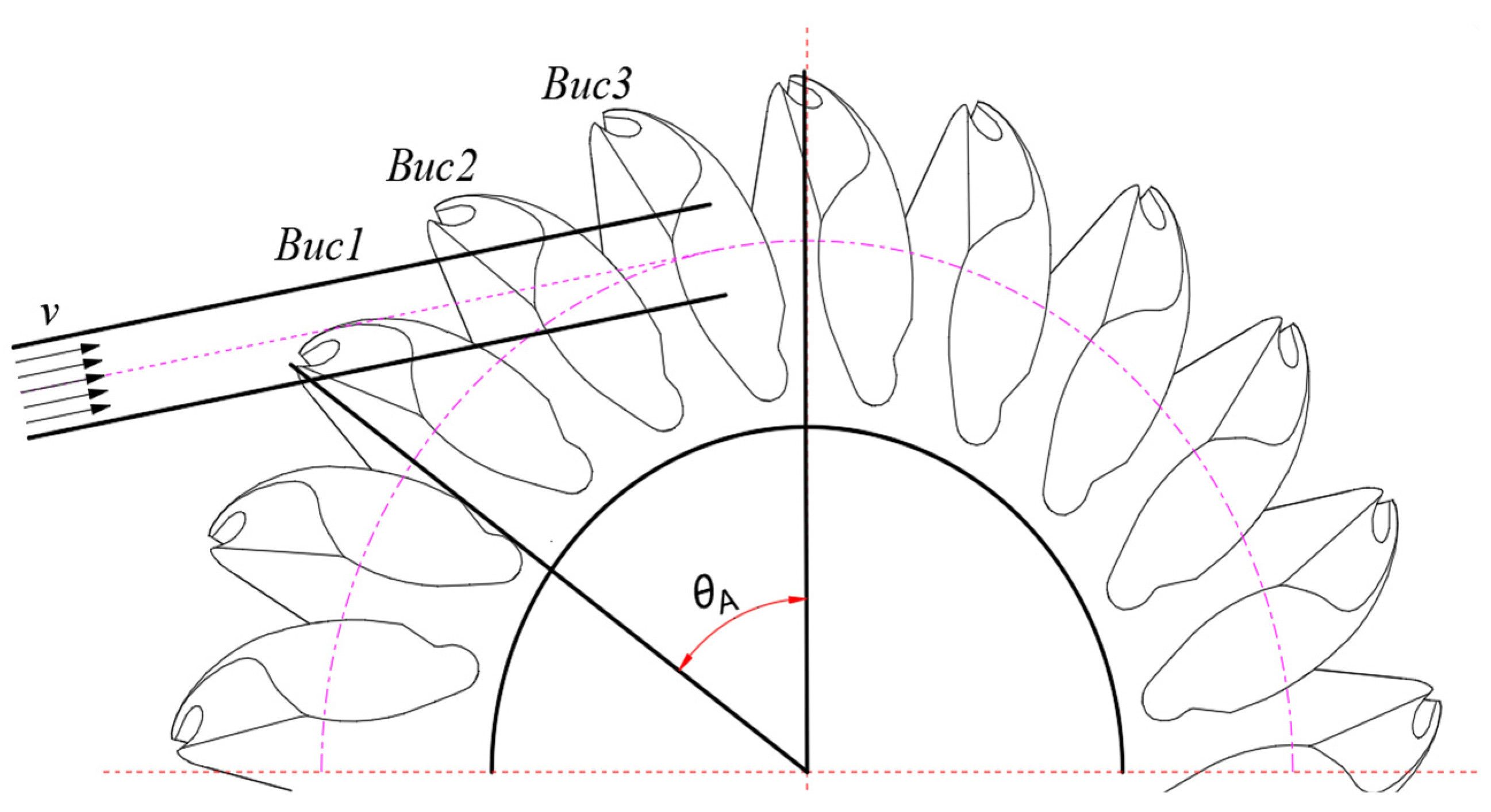
4.1. Effect of Deviation on the Internal Flow of the Bucket
4.2. Effect of Deviation on the Forces on the Runner
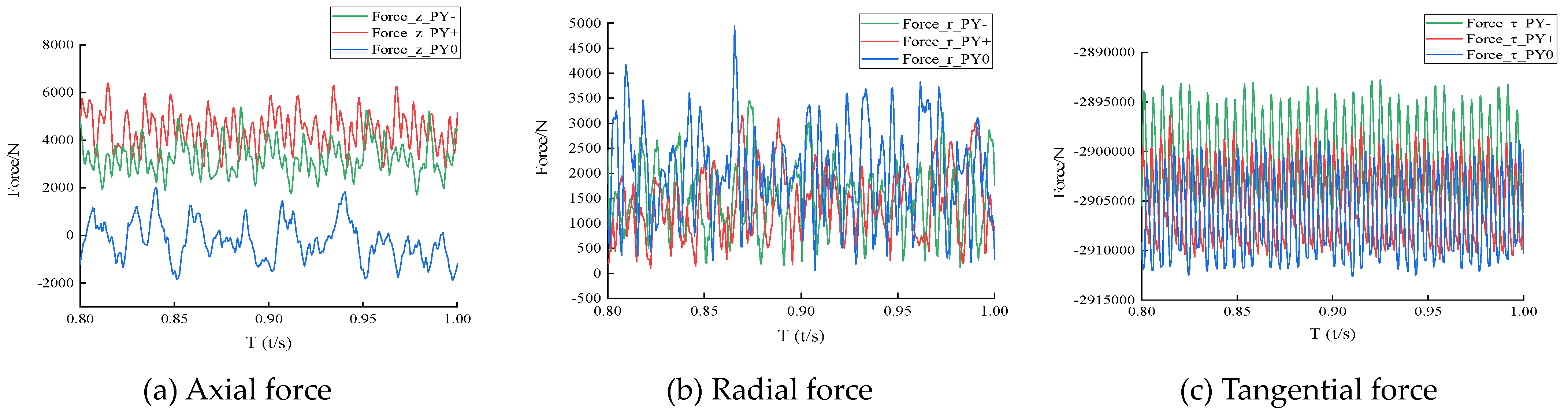
4.2.1. Effect of Radial Deviation on the Forces on the Runner
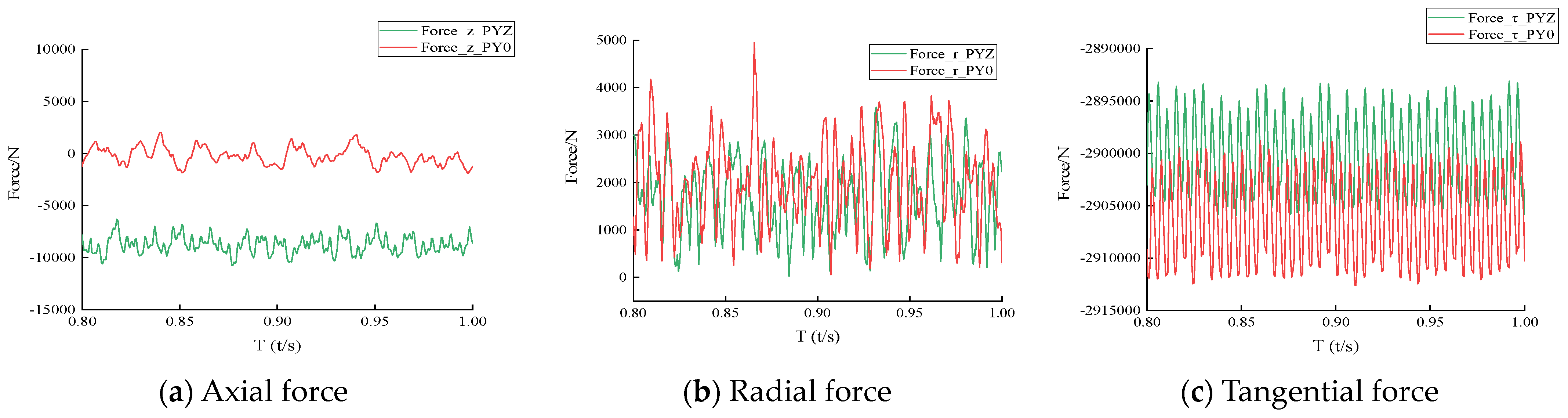
4.2.2. Effect of Axial Deviation on the Forces on the Runner
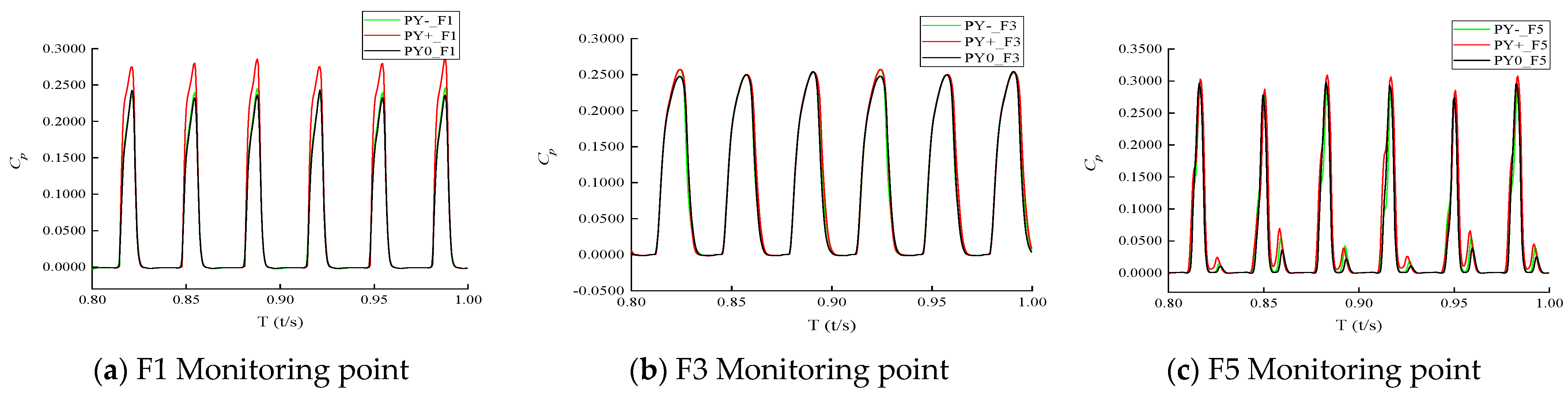
4.3. Effect of Deviation on Runner Pressure Pulsation
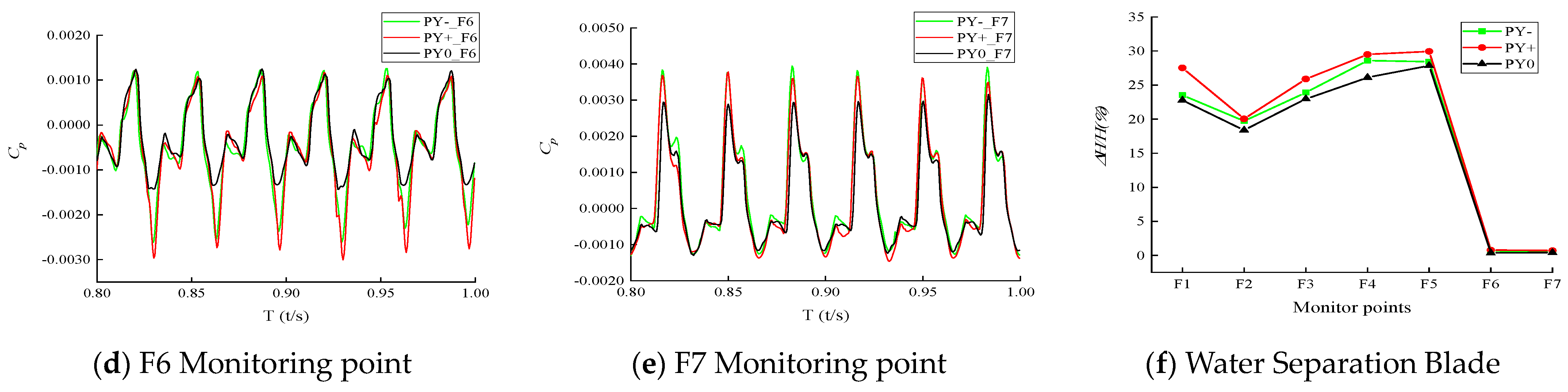
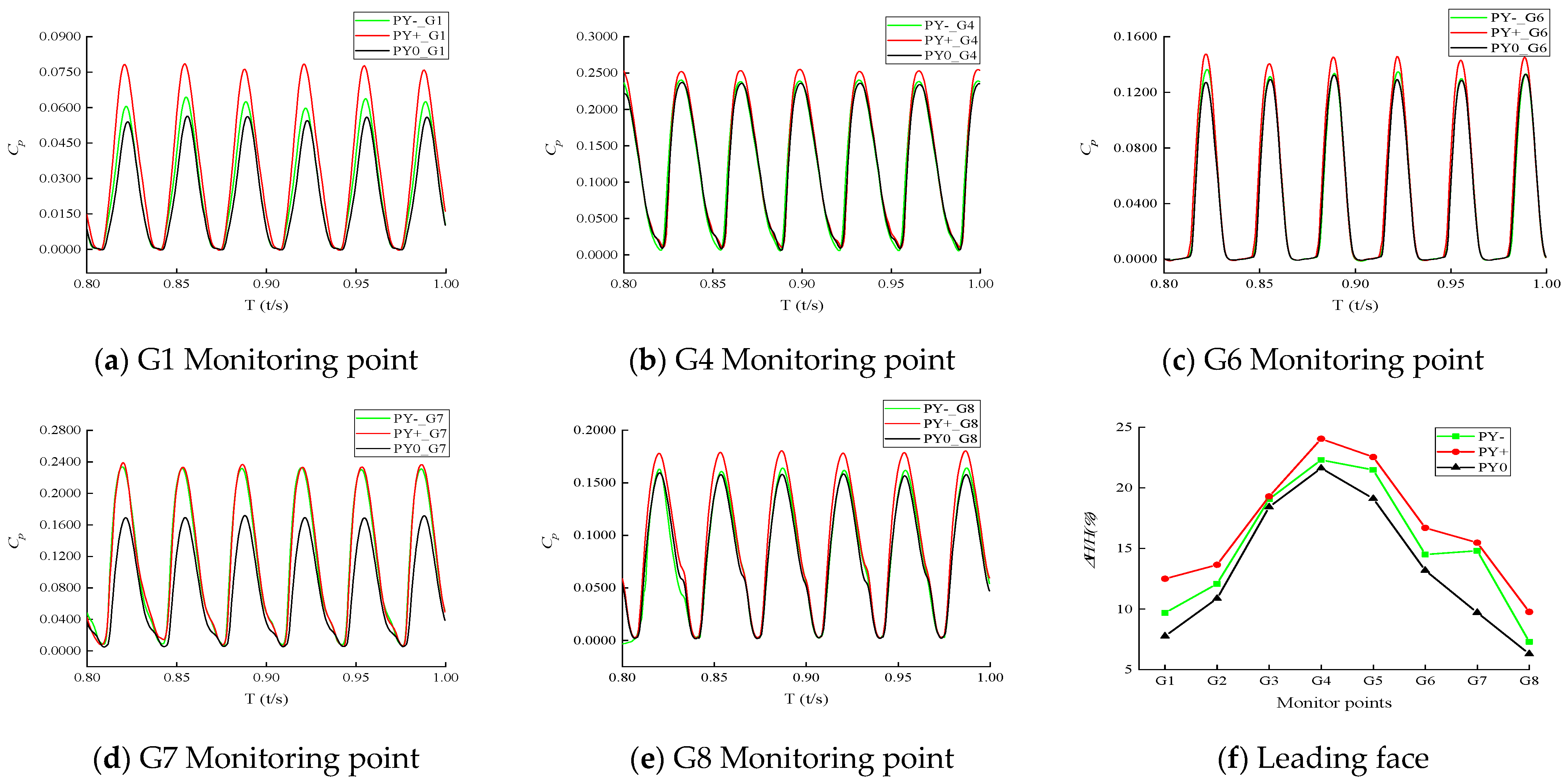
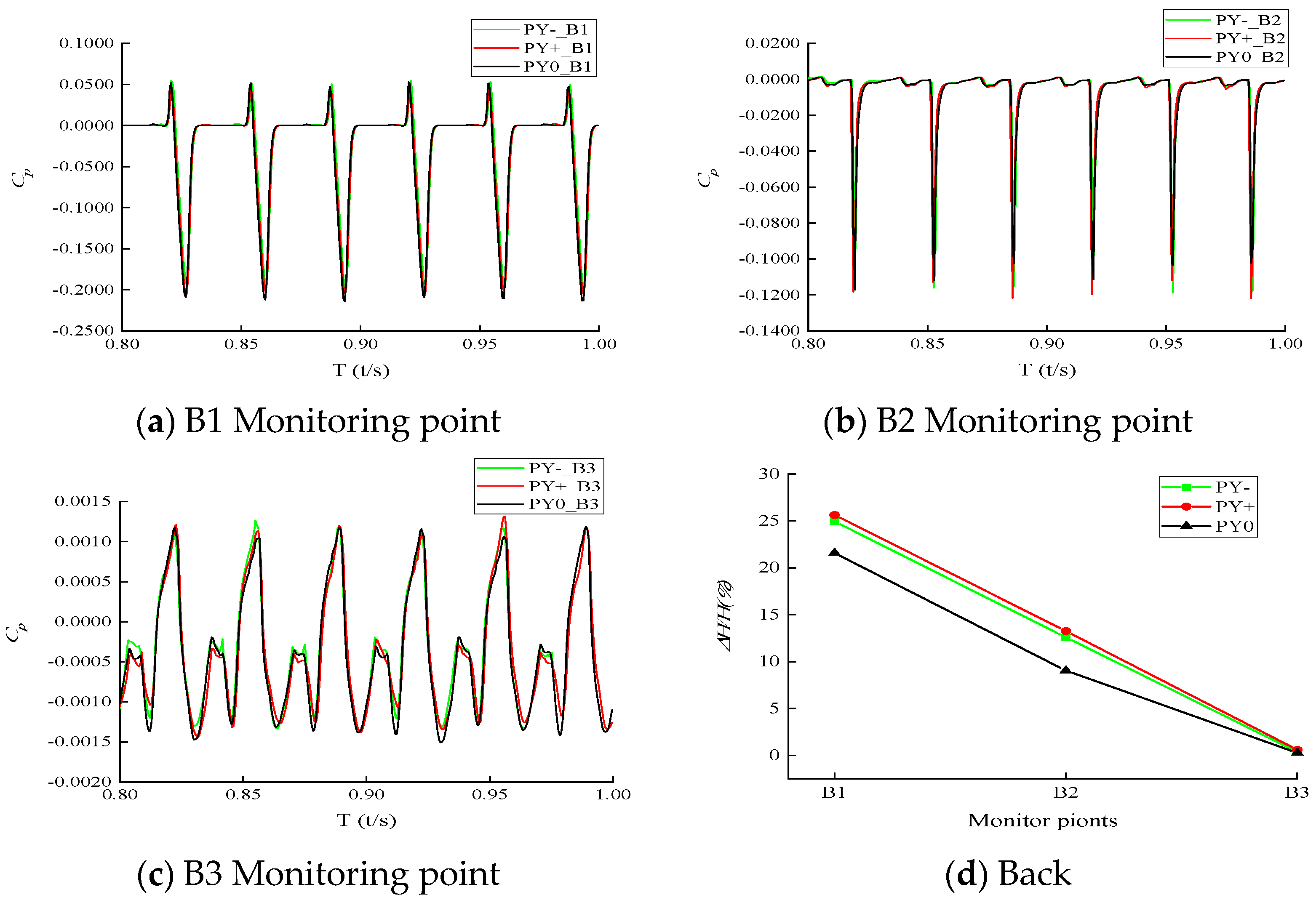
4.3.1. Effect of Radial Deviation on Pressure Pulsation of the Runner
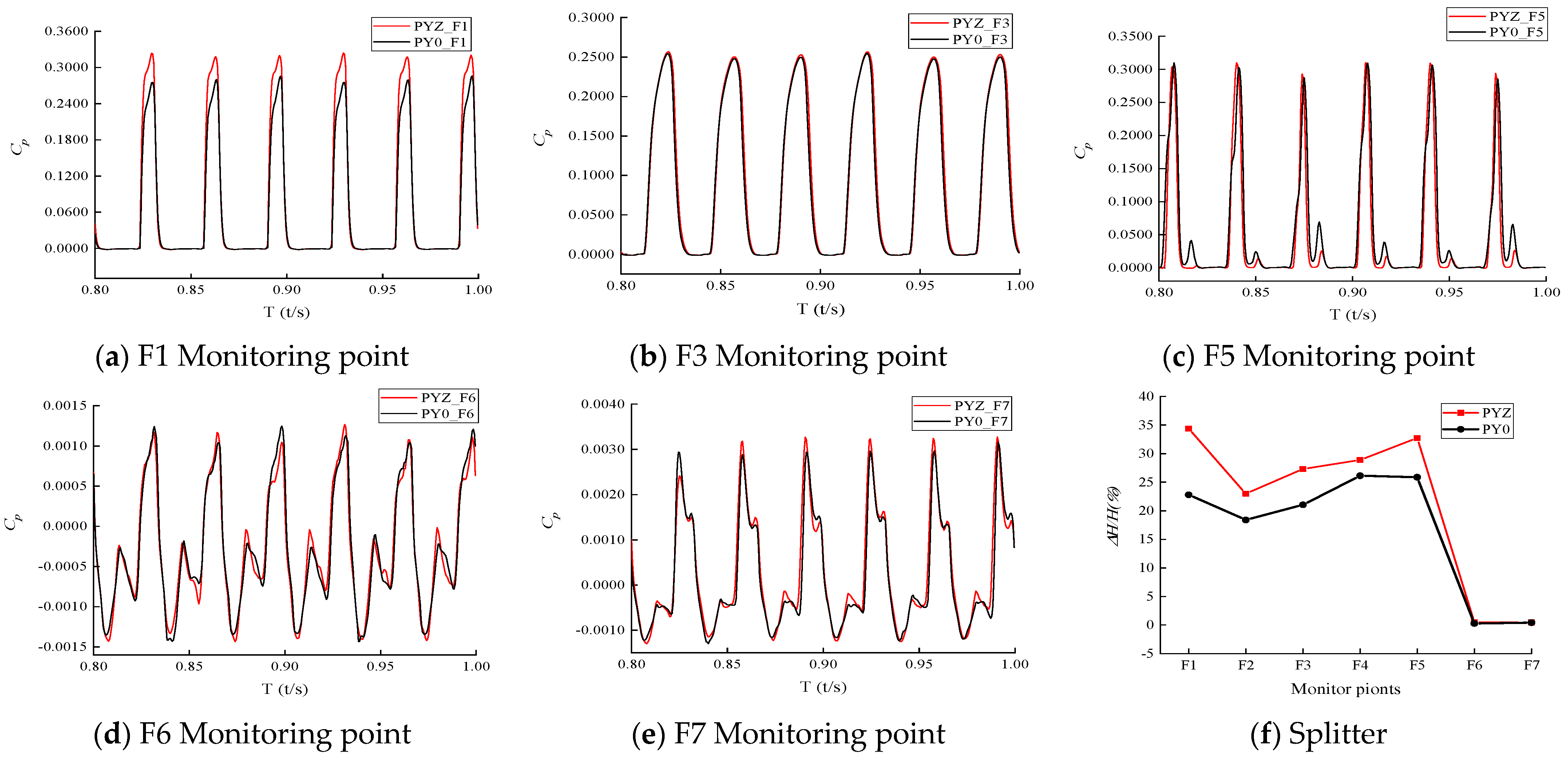
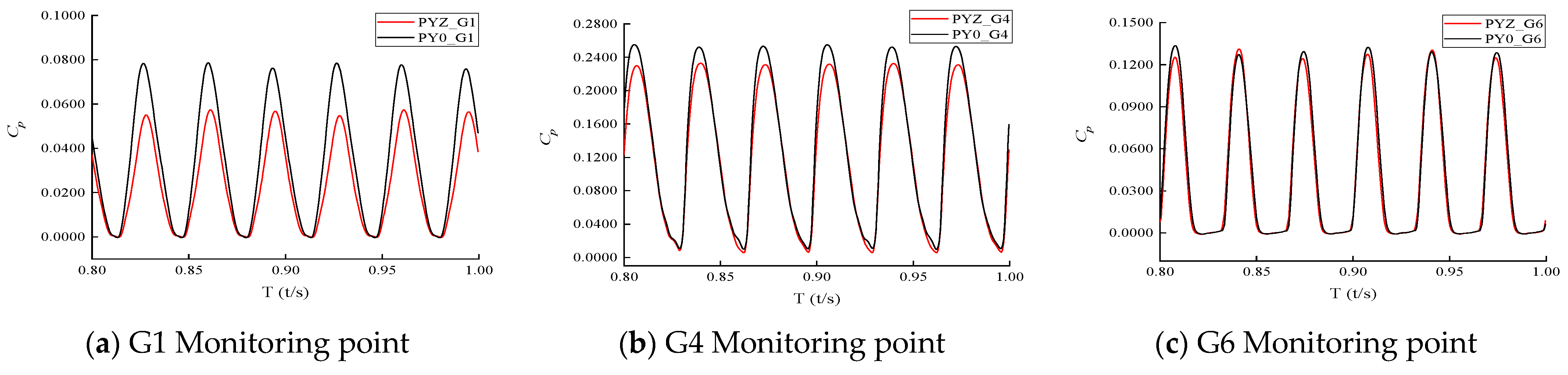
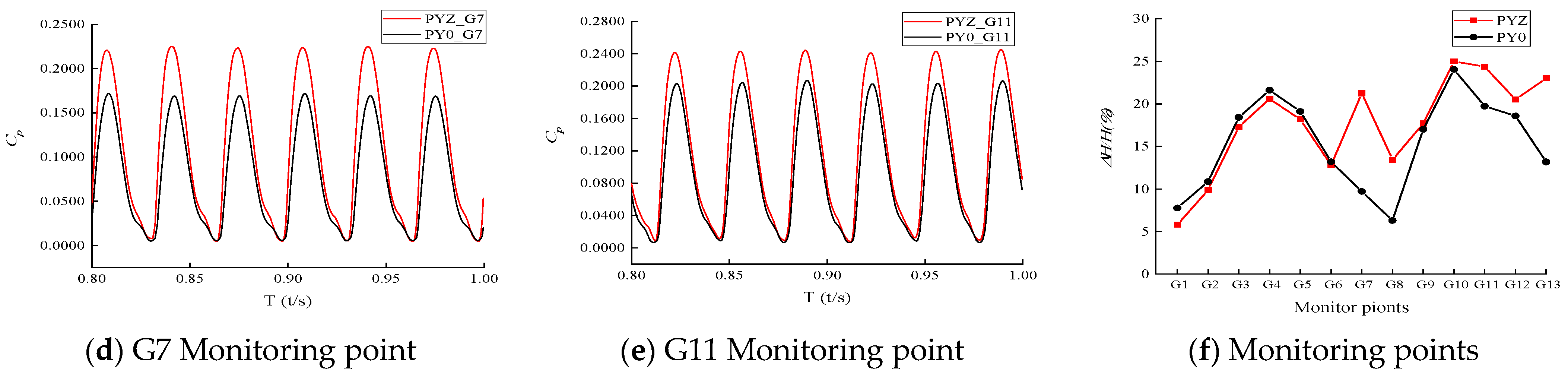
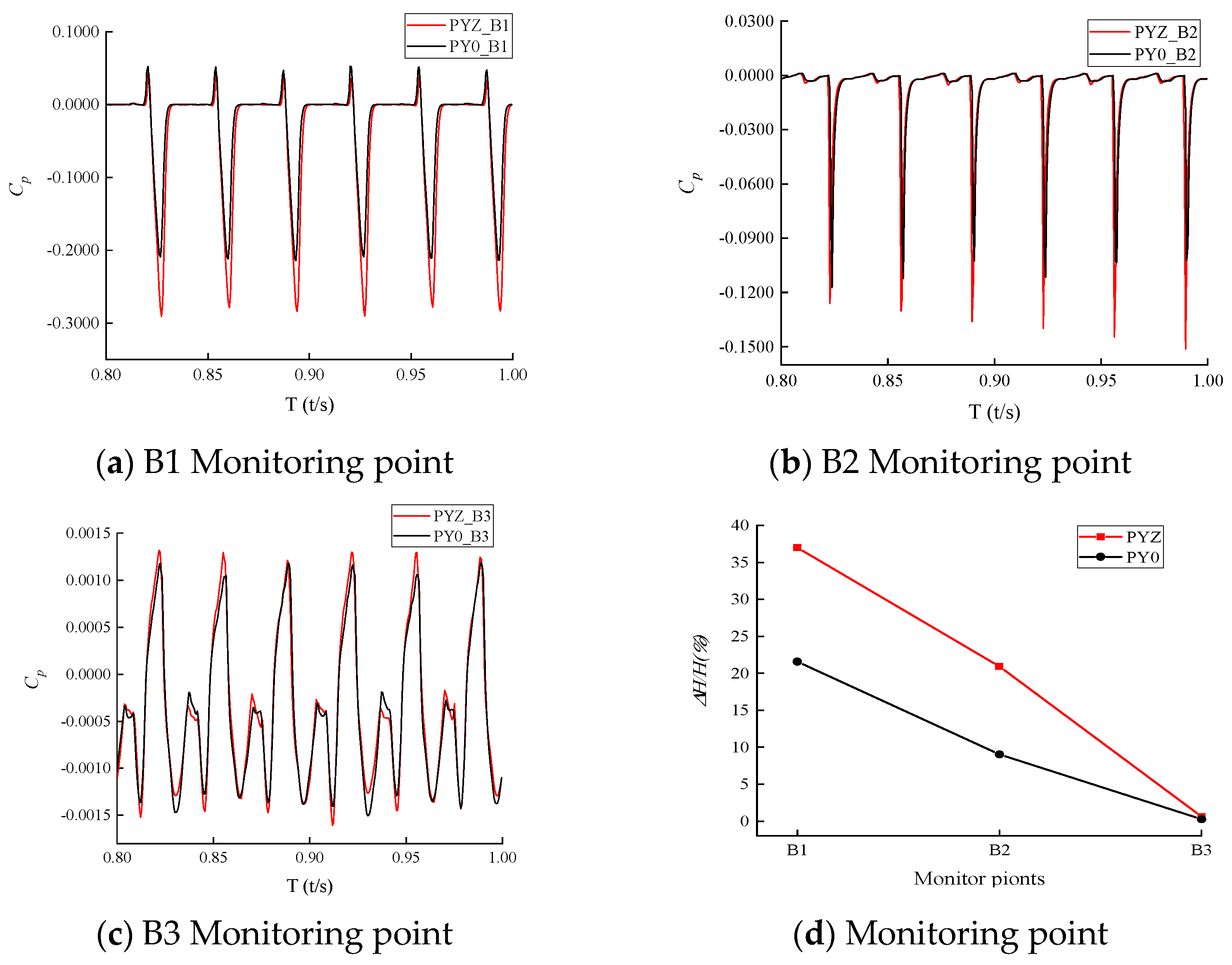
4.3.2. Effect of Axial Deviation on the Pressure Pulsation of the Runner
5. Conclusions
- (1)
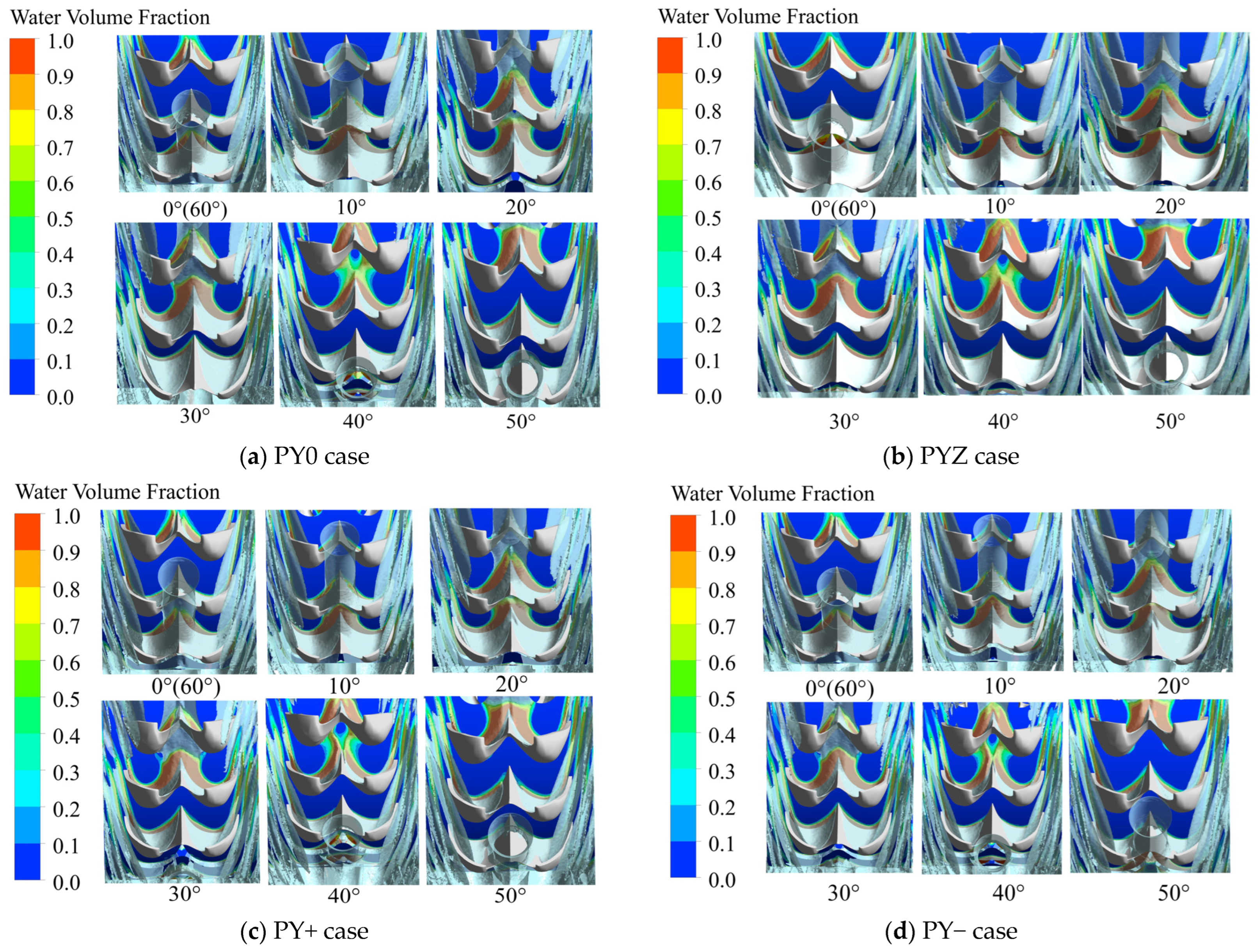
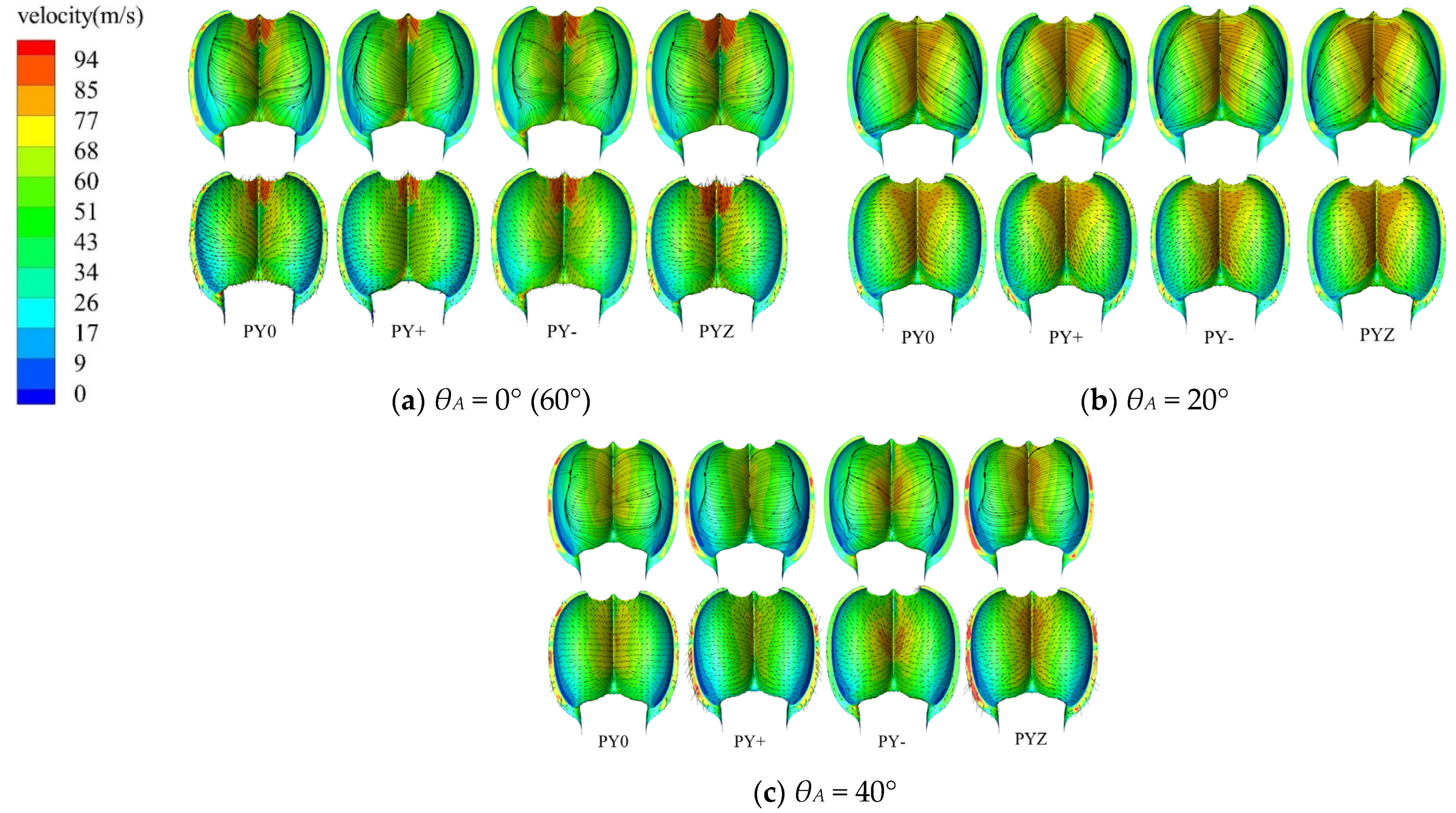
- A negative area will be formed on the area near the trailing edge of the bucket after the jet deviation, and the phenomena of “back interference” and “jet interference” appear at the same time, which are the main factors causing the decrease in turbine efficiency. The jet deviation affects the flow pattern inside the bucket, which affects the formation of water film and the diffusion rate on the surface of the bucket.
- (2)
- The jet deviation will affect the time of the jet entering the bucket. In the case of radial deviation, the axial force increases by about 2 times and the tangential force decreases by 0.25%. In the case of axial deviation, the axial force of the runner increases 4 times and the tangential force decreases by 0.4%. Since the tangential force is related to the runner torque and directly affects the output of the turbine, the test results show that the occurrences of the radial and axial deviations reduce the turbine efficiency by 0.3% and 0.4%, respectively. This indicates that the effect of axial offset on runner operation is greater than the effect of radial offset on it.
- (3)
- The relative amplitude of pressure pulsation after radial deviation shows an increasing trend compared with that without deviation, the relative amplitudes of pressure pulsation at some monitoring points increase by 60%, and the maximum relative amplitude of pressure pulsation appears in the center of the bucket, which is closely related to the striking effect of the jet. The relative amplitude of pressure pulsation in the case of jet deviation towards the outer edge of the runner increases more than that in the case of deviation towards the runner center, indicating that the pressure pulsation of the turbine will be more intense when the jet is deviated to the outer edge of the runner.
- (4)
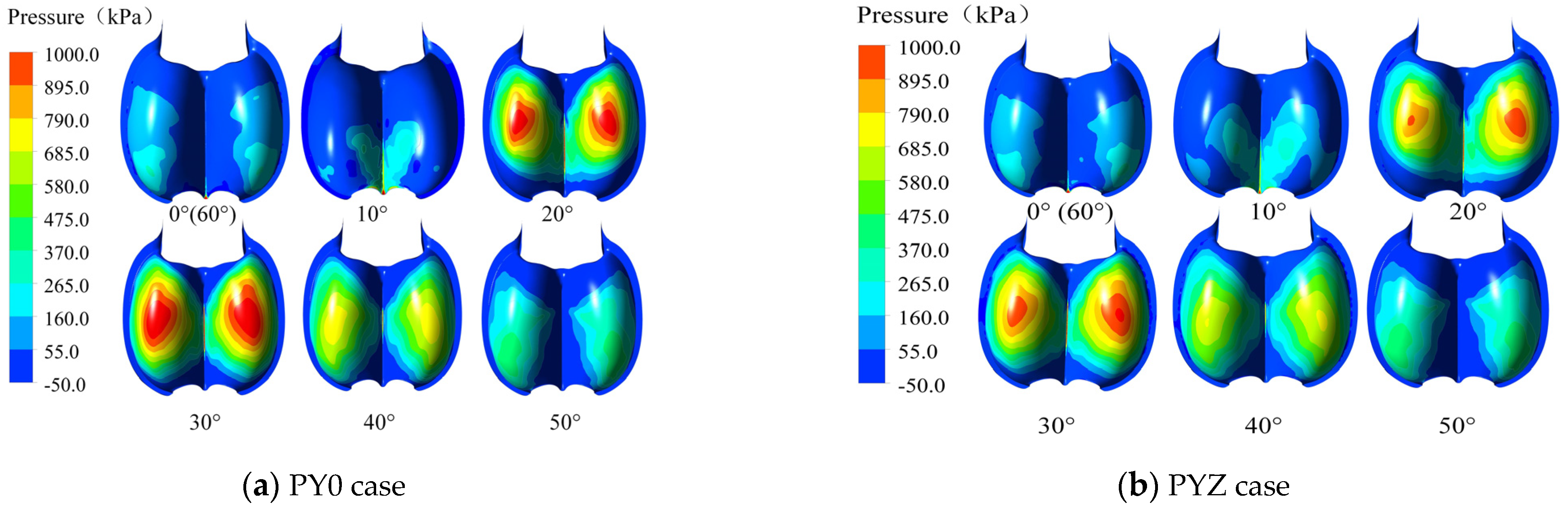
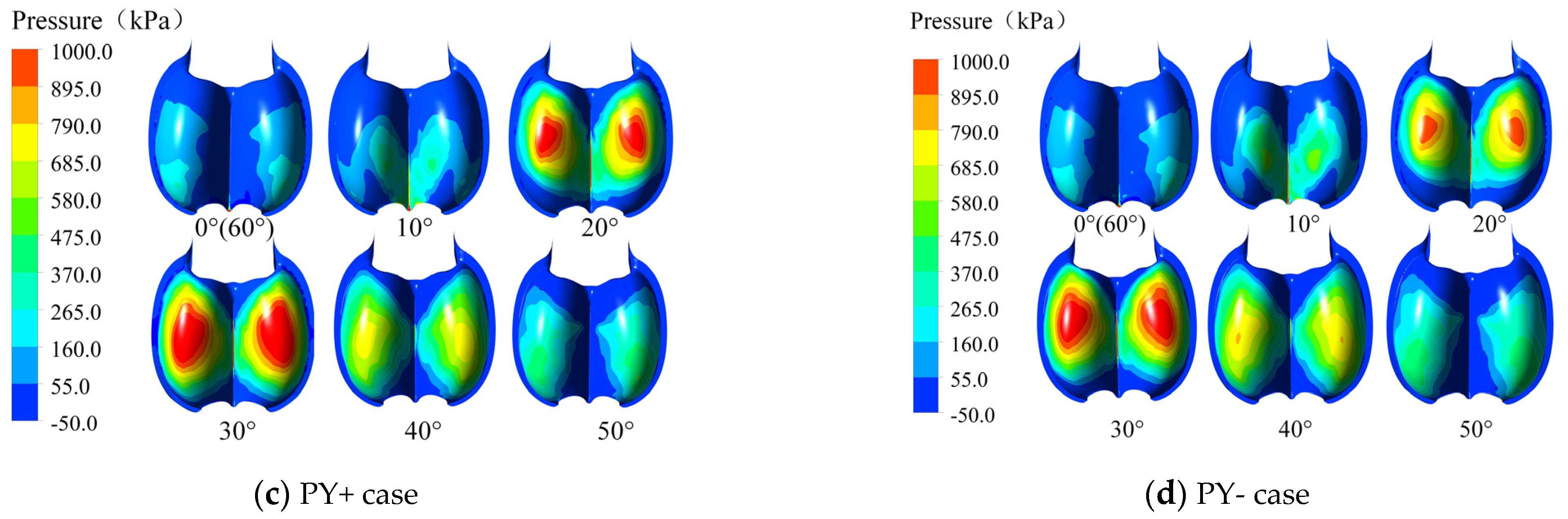
- The axial deviation of the jet causes an uneven pressure distribution on both sides of the splitter and an uneven force on the bucket, the relative amplitude of pressure pulsation of the turbine increases significantly, the axial force and axial oscillation of the runner increase, and the bucket is susceptible to vibration and fatigue damage.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Avellan, F.; Dupont, P.; Kvicinsky, S.; Chapuis, L.; Parkinson, E.; Vullioud, G. Flow Calculations in Pelton Turbines—Part 2: Free Surface Flows. In Proceedings of the 19th IAHR Symposium on Hydraulic Machinery and Cavitation, Singapore, 9–11 September 1998. [Google Scholar]
- Vessaz, C. Finite Particle Flow Simulation of Free Jet Deviation by Rotating Pelton Buckets. Ph.D. Thesis, EPFL, Lausanne, Switzerland, 2015. [Google Scholar]
- Kvicinsky, S.; Kueny, J.L.; Avellan, F.; Parkinson, E. Experimental and Numerical Analysis of Free Surface Flows in a Rotating Bucket. In Proceedings of the 21st IAHR Symposium on Hydraulic Machinery and Systems, Lausanne, Switzerland, 9–12 September 2002. [Google Scholar]
- You, J.; Lai, X.; Zhou, W.; Cheng, Y. 3D CFD simulation of the runaway process of a Pelton turbine. Proc. Inst. Mech. Eng. Part A J. Power Energy 2016, 230, 234–244. [Google Scholar] [CrossRef]
- Santolin, A.; Cavazzini, G.; Ardizzon, G.; Pavesi, G. Numerical investigation of the interaction between jet and bucket in a Pelton turbine. Proc. Inst. Mech. Eng. Part A J. Power Energy 2009, 223, 721–728. [Google Scholar] [CrossRef]
- Panagiotopoulos, A.; Židonis, A.; Aggidis, G.A.; Anagnostopoulos, J.S.; Papantonis, D.E. Flow modeling in Pelton turbines by an accurate Eulerian and a fast Lagrangian evaluation method. Int. J. Rotating Mach. 2015, 2015, 255–267. [Google Scholar] [CrossRef]
- Xiao, Y.X.; Cui, T.; Wang, Z.W.; Yan, Z.G. Numerical simulation of unsteady free surface flow and dynamic performance for a Pelton turbine. IOP Conf. Ser. Earth Environ. Sci. 2012, 15, 052033. [Google Scholar] [CrossRef]
- Perrig, A.; Farhat, M.; Avellan, F.; Parkinson, E.; Garcin, H.; Bissel, C.; Valle, M.; Favre, J.M. Numerical Flow Analysis in a Pelton Turbine Bucket. In Proceedings of the 22nd IAHR Symposium on Hydraulic Machinery and Systems, Stockholm, Sweden, 29 June–2 July 2004. [Google Scholar]
- Perrig, A.; Avellan, F.; Kueny, J.-L.; Farhat, M.; Parkinson, E. Flow in a Pelton Turbine Bucket: Numerical and Experimental Investigations. ASME. J. Fluids Eng. 2006, 128, 350–358. [Google Scholar] [CrossRef]
- Perrig, A. Hydrodynamics of the Free Surface Flow in Pelton Turbine Buckets. Ph.D. Thesis, EPFL, Lausanne, Switzerland, 2007. [Google Scholar]
- Gupta, V.; Prasad, V.; Khare, R. Numerical simulation of six jet Pelton turbine model. Energy 2016, 104, 24–32. [Google Scholar] [CrossRef]
- Zoppé, B.; Pellone, C.; Maitre, T.; Leroy, P. Flow Analysis Inside a Pelton Turbine Bucket. J. Turbomach. 2006, 128, 500–511. [Google Scholar] [CrossRef]
- Zeng, C.; Xiao, Y.; Luo, Y.; Zhang, J.; Wang, Z.; Fan, H.; Ahn, S.-H. Hydraulic performance prediction of a prototype four-nozzle Pelton turbine by entire flow path simulation. Renew. Energy 2018, 125, 270–282. [Google Scholar] [CrossRef]
- Xiao, Y.; Wang, Z.; Zhang, J.; Zeng, C.; Yan, Z. Numerical and experimental analysis of the hydraulic performance of a prototype Pelton turbine. Proc. Inst. Mech. Eng. Part A J. Power Energy 2014, 228, 46–55. [Google Scholar] [CrossRef]
- Xiao, Y.X.; Zeng, C.J.; Zhang, J.; Yan, Z.G.; Wang, Z.W. Numerical Analysis of the Bucket Surface Roughness Effects in Pelton Turbine. In Proceedings of the 6th International Conference on Pumps and Fans with Compressors and Wind Turbines, Beijing, China, 19–22 September 2013. [Google Scholar]
- Zeng, C.J.; Xiao, Y.X.; Zhu, W.; Yao, Y.Y.; Wang, Z.W. Numerical Simulation of Cavitation Flow Characteristic on Pelton Turbine Bucket Surface. In Proceedings of the ISCM2014, Beijing, China, 18–21 October 2014. [Google Scholar]
- Mack, R.; Aschenbrenner, T.; Rohne, W.; Farhat, M. Validation of Bucket Flow Simulation using Dynamic Pressure Measurements. In Proceedings of the 22nd IAHR Symposium on Hydraulic Machinery and Systems, Stockholm, Sweden, 29 June–2 July 2004. [Google Scholar]
- Židonis, A.; Aggidis, G. Pelton turbine: Identifying the optimum number of buckets using CFD. J. Hydrodyn. Ser. B 2016, 28, 75–83. [Google Scholar] [CrossRef]
- Egusquiza, M.; Egusquiza, E.; Valentin, D.; Valero, C.; Presas, A. Failure investigation of a Pelton turbine runner. Eng. Fail. Anal. 2017, 81, 234–244. [Google Scholar] [CrossRef]
- Xiao, Y.; Zheng, A.; Han, F.; Ding, E.; Kubota, T. CFD method to study jet interference of multi-nozzle impact turbine. J. South China Univ. Technol. (Nat. Sci. Ed.) 2007, 35, 66–70. [Google Scholar]
- Chen, Z.; Liu, Y.; Yu, B.; Lei, H. Analysis of the causes of efficiency decline of impact hydraulic turbine and its improvement scheme. Hydroelectr. Power Gener. 2016, 42, 49–52. [Google Scholar]
- Han, F.; Kubota, J.; Liu, J. Numerical Simulation of Unsteady Flow on Pelton Buckets. J. Huazhong Univ. Technol. 2000, 11, 14–16. [Google Scholar]
- Jung, I.H.; Kim, Y.S.; Shin, D.H.; Chung, J.T.; Shin, Y. Influence of spear needle eccentricity on jet quality in micro Pelton turbine for power generation. Energy 2019, 175, 58–65. [Google Scholar] [CrossRef]
- Huang, J.; Ge, X.; Chu, D.; Zhang, J.; Xu, B.; Gao, F.; Zheng, Y. Research on the Effect of Needle Eccentricity on the Jet Flow Characteristics. Front. Energy Res. 2022, 10, 882747. [Google Scholar]
- Petley, S.; Panagiotopoulos, A.; Benzon, D.S.; Židonis, A.; Aggidis, G.A.; Anagnostopoulos, J.S.; Papantonis, D.E. Investigating the influence of the jet from three nozzle and spear design configurations on Pelton runner performance by numerical simulation. IOP Conf. Ser. Earth Environ. Sci. 2019, 240, 022004. [Google Scholar] [CrossRef]
- Hahn, F.J.J.; Semlitsch, B.; Bauer, C. On the numerical assessment of flow losses and secondary flows in Pelton turbine manifolds. IOP Conf. Ser. Earth Environ. Sci. 2022, 1079, 012082. [Google Scholar] [CrossRef]
- Jiang, Y. Numerical Simulation Study on Fluid-Solid Coupling of Impinging Hydraulic Turbine. Master’s Thesis, Wuhan University, Wuhan, China, 2017. [Google Scholar]
- Pang, J.; Liu, X.; Ren, M.; Zhang, P. Analysis of the causes of oil mist in the lower guide bearing of hydro generator set. Therm. Power Eng. 2021, 36, 13–19. [Google Scholar] [CrossRef]
- Zhang, Y. Technical Specifications for the Installation of Hydro-Generator Sets; Hubei Province, China Gezhouba Water Conservancy and Hydropower Engineering Group Co., Ltd.: Yichang, China, 2016. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turbulence Model | Computational Efficiency (%) | Rated Efficiency (%) | Relative Error (%) |
|---|---|---|---|
| Standard k-ε | 81.66 | 91.79 | −11.04 |
| RNG k-ε | 88.93 | 91.79 | −3.12 |
| SST k-ω | 90.98 | 91.79 | −0.88 |
| Name and Unit | Value | Name and Unit | Value |
|---|---|---|---|
| Number of nozzles | 6 | Rated speed nr (rpm) | 300 |
| Jet diameter d (mm) | 258 | Rotor pitch circle diameter D1 (mm) | 2890 |
| Rated flow Qr (m3/s) | 30.14 | Maximum width of bucket B (mm) | 890.4 |
| Rated head Hr (m) | 457 | Maximum width inside the bucket W (mm) | 835 |
| Rated output Pr (MW) | 123 | Number of buckets | 21 |
| Scheme | Number of Grids | Calculated Efficiency (%) | Rated Efficiency (%) | Relative (%) |
|---|---|---|---|---|
| ⅰ | 7,860,000 | 82.67 | 91.79 | −9.94 |
| ⅱ | 10,210,000 | 89.76 | 91.79 | −2.21 |
| ⅲ | 12,120,000 | 91.33 | 91.79 | −0.50 |
| ⅳ | 14,030,000 | 91.59 | 91.79 | −0.22 |
| Operating Conditions | Direction | Calculated Maximum Value (N) | Measured Value | Early Warning Value |
|---|---|---|---|---|
| PY0 | z | 2003 | Vibration 5 μm | 30 μm |
| r | 4954 | Oscillation 352 μm | 400 μm | |
| τ | −2,912,600 | Efficiency 91.79% | ||
| PY− | z | 5588 | Vibration 14 μm | 30 μm |
| r | 3457 | Oscillation 273 μm | 400 μm | |
| τ | −2,903,990 | Efficiency 91.46% | ||
| PY+ | z | 6555 | Vibration 17 μm | 30 μm |
| r | 4331 | Oscillation 328 μm | 400 μm | |
| τ | −2,906,220 | Efficiency 91.52% | ||
| PYZ | z | −11,057 | Vibration 28 μm | 30 μm |
| r | 3705 | Oscillation 287 μm | 400 μm | |
| τ | −2,901,000 | Efficiency 91.37% |
| Parameters | Condition | G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 | G9 | G10 | G11 | G12 |
| Average Cp | PY0 | 0.0336 | 0.0696 | 0.1025 | 0.1197 | 0.0814 | 0.042 | 0.0143 | 0.0352 | 0.0361 | 0.117 | 0.0141 | 0.1023 |
| PY− | 0.0425 | 0.0774 | 0.1065 | 0.1248 | 0.0971 | 0.0474 | 0.0807 | 0.0426 | |||||
| PY+ | 0.0751 | 0.0831 | 0.1089 | 0.1281 | 0.1011 | 0.0527 | 0.0849 | 0.0466 | |||||
| PYZ | 0.0226 | 0.0721 | 0.1026 | 0.1184 | 0.0889 | 0.0402 | 0.1049 | 0.0633 | 0.0911 | 0.1324 | 0.1172 | 0.116 | |
| ΔH/H (%) | PY0 | 7.77 | 10.87 | 18.41 | 21.61 | 19.11 | 13.19 | 9.71 | 6.3 | 17.01 | 24.05 | 19.72 | 18.58 |
| PY− | 9.67 | 12.08 | 19.06 | 23.55 | 21.47 | 15.02 | 14.81 | 7.29 | |||||
| PY+ | 14.16 | 13.65 | 19.28 | 24.04 | 22.53 | 16.7 | 15.47 | 7.76 | |||||
| PYZ | 5.80 | 9.89 | 19.28 | 23.59 | 21.18 | 14.22 | 21.24 | 14.12 | 17.69 | 25.19 | 24.36 | 20.52 | |
| Parameters | Condition | G13 | F1 | F2 | F3 | F4 | F5 | F6 | F7 | B1 | B2 | B3 | |
| Average Cp | PY0 | 0.0811 | 0.0369 | 0.0413 | 0.0560 | 0.1181 | 0.0322 | −0.0003 | 0.0002 | −0.0171 | −0.0043 | −0.0004 | |
| PY− | 0.0458 | 0.0456 | 0.0942 | 0.1208 | 0.0413 | −0.0005 | 0.0004 | −0.0226 | −0.0061 | −0.0005 | |||
| PY+ | 0.0469 | 0.0473 | 0.0987 | 0.1231 | 0.0444 | −0.0006 | 0.0005 | −0.0256 | −0.0067 | −0.0006 | |||
| PYZ | 0.1012 | 0.0700 | 0.0493 | 0.0958 | 0.1147 | 0.0448 | −0.0002 | 0.0004 | −0.0412 | −0.0084 | −0.0005 | ||
| ΔH/H (%) | PY0 | 13.18 | 22.78 | 18.38 | 21.04 | 26.12 | 25.87 | 0.27 | 0.41 | 21.58 | 9.03 | 0.26 | |
| PY− | 24.63 | 19.72 | 23.91 | 28.6 | 29.45 | 0.45 | 0.54 | 24.93 | 12.58 | 0.37 | |||
| PY+ | 24.83 | 20.04 | 25.9 | 29.5 | 29.95 | 0.67 | 0.7 | 25.62 | 13.25 | 0.57 | |||
| PYZ | 23.01 | 34.36 | 22.98 | 27.30 | 28.89 | 32.72 | 0.49 | 0.44 | 36.99 | 20.93 | 0.59 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, H.; Song, K.; Deng, F.; Huang, Y.; Luo, T.; Zhou, Y.; Qin, B.; Zeng, Y.; Yu, Z.; Pang, J.; et al. Nozzle Jet Deviation from Bucket Pitch Circle’s Effect on the Stability and Efficiency of Pelton Turbine. Processes 2023, 11, 1342. https://doi.org/10.3390/pr11051342
Deng H, Song K, Deng F, Huang Y, Luo T, Zhou Y, Qin B, Zeng Y, Yu Z, Pang J, et al. Nozzle Jet Deviation from Bucket Pitch Circle’s Effect on the Stability and Efficiency of Pelton Turbine. Processes. 2023; 11(5):1342. https://doi.org/10.3390/pr11051342
Chicago/Turabian StyleDeng, Huiming, Ke Song, Fangxiong Deng, Yu Huang, Tao Luo, Yijin Zhou, Bei Qin, Yongzhong Zeng, Zhishun Yu, Jiayang Pang, and et al. 2023. "Nozzle Jet Deviation from Bucket Pitch Circle’s Effect on the Stability and Efficiency of Pelton Turbine" Processes 11, no. 5: 1342. https://doi.org/10.3390/pr11051342