Optimal Design of LCL Harmonic Filters for Three-Phase PFC ...
Optimal Design of LCL Harmonic Filters for Three-Phase PFC ...
Optimal Design of LCL Harmonic Filters for Three-Phase PFC ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
© 2013 IEEE<br />
IEEE Transactions on Power Electronics, Vol. 28, No. 7, pp. 3114-3125, July 2013.<br />
<strong>Optimal</strong> <strong>Design</strong> <strong>of</strong> <strong>LCL</strong> <strong>Harmonic</strong> <strong>Filters</strong> <strong>for</strong> <strong>Three</strong>-<strong>Phase</strong> <strong>PFC</strong> Rectifiers<br />
J. Mühlethaler<br />
M. Schweizer<br />
R. Blattmann<br />
J. W. Kolar<br />
A. Ecklebe<br />
This material is posted here with permission <strong>of</strong> the IEEE. Such permission <strong>of</strong> the IEEE does not in any way imply IEEE<br />
endorsement <strong>of</strong> any <strong>of</strong> ETH Zurich‘s products or services. Internal or personal use <strong>of</strong> this material is permitted. However,<br />
permission to reprint/republish this material <strong>for</strong> advertising or promotional purposes or <strong>for</strong> creating new collective works <strong>for</strong><br />
resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org. By choosing to view this<br />
document, you agree to all provisions <strong>of</strong> the copyright laws protecting it.
3114 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 7, JULY 2013<br />
<strong>Optimal</strong> <strong>Design</strong> <strong>of</strong> <strong>LCL</strong> <strong>Harmonic</strong> <strong>Filters</strong><br />
<strong>for</strong> <strong>Three</strong>-<strong>Phase</strong> <strong>PFC</strong> Rectifiers<br />
Jonas Mühlethaler, Student Member, IEEE, Mario Schweizer, Student Member, IEEE, Robert Blattmann,<br />
Johann W. Kolar, Fellow, IEEE, and Andreas Ecklebe, Member, IEEE<br />
Abstract—Inductive components such as line filter inductors or<br />
trans<strong>for</strong>mers occupy a significant amount <strong>of</strong> space in today’s power<br />
electronic systems, and furthermore, considerable losses occur in<br />
these components. A main application <strong>of</strong> inductive components is<br />
EMI filters, as, e.g., employed <strong>for</strong> the attenuation <strong>of</strong> switching frequency<br />
harmonics <strong>of</strong> power factor correction (<strong>PFC</strong>) rectifier systems.<br />
In this paper, a design procedure <strong>for</strong> the mains side <strong>LCL</strong> filter<br />
<strong>of</strong> an active three-phase rectifier is introduced. The procedure is<br />
based on a generic optimization approach, which guarantees a low<br />
volume and/or low losses. Different designs are calculated to show<br />
the trade<strong>of</strong>f between filter volume and filter losses. The design procedure<br />
is verified by experimental measurements. Furthermore, an<br />
overall system optimization, i.e., an optimization <strong>of</strong> the complete<br />
three-phase <strong>PFC</strong> rectifier, is given.<br />
Index Terms—<strong>LCL</strong> filter, magnetic components, optimization.<br />
I. INTRODUCTION<br />
THE trend in power electronics research is toward<br />
higher efficiency and higher power density <strong>of</strong> converter<br />
systems. This trend is driven by cost considerations (e.g., material<br />
economies), space limitations, (e.g., <strong>for</strong> automotive applications),<br />
and increasing efficiency requirements (e.g., <strong>for</strong> telecom<br />
applications). The increase <strong>of</strong> the power density <strong>of</strong>ten affects<br />
the efficiency, i.e., a trade<strong>of</strong>f between these two quality indices<br />
exists [1].<br />
Inductive components occupy a significant amount <strong>of</strong> space in<br />
today’s power electronic systems, and furthermore, considerable<br />
losses occur in these components. In order to increase the power<br />
density and/or efficiency <strong>of</strong> power electronic systems, losses<br />
in inductive components must be reduced, and/or new cooling<br />
concepts need to be investigated.<br />
At the Power Electronic Systems Laboratory at ETH Zurich,<br />
a project has been initiated with the goal to establish comprehensive<br />
models <strong>of</strong> inductive power components which can be<br />
adapted to various geometric properties, operating conditions,<br />
and cooling conditions. These models will <strong>for</strong>m the basis <strong>for</strong> the<br />
Manuscript received April 17, 2012; revised June 11, 2012; accepted July 17,<br />
2012. Date <strong>of</strong> current version December 24, 2012. Recommended <strong>for</strong> publication<br />
by Associate Editor J. Antenor Pomilio.<br />
J. Mühlethaler, M. Schweizer, and J. W. Kolar are with the Power Electronic<br />
Systems Laboratory, ETH Zurich, 8006 Zurich, Switzerland (e-mail:<br />
muehlethaler@lem.ee.ethz.ch; schweizer@lem.ee.ethz.ch; kolar@lem.ee.ethz.<br />
ch).<br />
R. Blattmann is with the ABB Switzerland, Ltd., CH-5400 Baden,<br />
Switzerland (e-mail: robert.blattmann@ch.abb.com).<br />
A. Ecklebe is with the Corporate Research Center, ABB Switzerland, Ltd.,<br />
CH-5405 Baden-Dättwil, Switzerland (e-mail: andreas.ecklebe@ch.abb.com).<br />
Color versions <strong>of</strong> one or more <strong>of</strong> the figures in this paper are available online<br />
at http://ieeexplore.ieee.org.<br />
Digital Object Identifier 10.1109/TPEL.2012.2225641<br />
optimization <strong>of</strong> inductive components employed in key power<br />
electronics applications.<br />
Numerous papers have been written about how to find optimal<br />
designs <strong>of</strong> power electronic systems, whereas the goal <strong>of</strong><br />
the according optimization task can be minimum costs, volume,<br />
losses, etc. Some papers investigated parts <strong>of</strong> a system, some<br />
others tried to model and optimize the overall system. For instance,<br />
in [2], an overall optimization <strong>of</strong> a two-FET <strong>for</strong>ward<br />
converter is presented. For it, a two-stage optimization method<br />
to optimize the efficiency from light load to full load is proposed.<br />
Another approach to conduct an overall optimization is given<br />
in [3], where a flyback converter has been optimized. In [4], an<br />
overall optimization <strong>of</strong> a boost power factor correction (<strong>PFC</strong>)<br />
converter including the input electromagnetic interference filter<br />
is conducted. Examples <strong>of</strong> papers in which the focus is put only<br />
on parts <strong>of</strong> a system are, e.g., given in [5] and [6]. In [5], it<br />
is shown on the example <strong>of</strong> a buck converter, how the capacitors<br />
<strong>of</strong> a dc-link capacitor tank are selected optimally. In [6], a<br />
design methodology that finds the volumetric optimized inductors<br />
employed in single-phase <strong>PFC</strong> boost converters is given,<br />
whereas the corresponding optimum switching frequency and<br />
input current ripple is found.<br />
The aim <strong>of</strong> this paper is to use the recently established comprehensive<br />
models <strong>of</strong> inductive power components to optimally<br />
design <strong>LCL</strong> input filters <strong>for</strong> a three-phase <strong>PFC</strong> rectifier. The focus<br />
<strong>of</strong> the paper at hand is put on the optimal design <strong>of</strong> the <strong>LCL</strong><br />
harmonic filters. <strong>LCL</strong> input filters are an attractive solution to<br />
attenuate switching frequency current harmonics <strong>of</strong> active voltage<br />
source rectifiers [7], [8]. In this paper, a design procedure<br />
<strong>for</strong> <strong>LCL</strong> filters based on a generic optimization approach is introduced<br />
guaranteeing low volume and/or low losses. Different<br />
designs are calculated showing the trade<strong>of</strong>f between filter volume<br />
and filter losses. Furthermore, it is shown at the end <strong>of</strong> this<br />
paper how an overall system optimization, i.e., an optimization<br />
<strong>of</strong> the complete three-phase <strong>PFC</strong> rectifier (not only the filter),<br />
could be conducted. It is important to consider the complete<br />
system, since there are parameters that bring advantages <strong>for</strong> one<br />
subsystem but bring disadvantages <strong>for</strong> another. For instance, in<br />
the selected example <strong>of</strong> an <strong>LCL</strong> input filter, a higher switching<br />
frequency leads to lower volume, or, when keeping the volume<br />
constant, to lower losses <strong>of</strong> the inductive components. However,<br />
higher semiconductor switching losses are expected in the case<br />
<strong>of</strong> higher switching frequencies.<br />
In Section II, the three-phase <strong>PFC</strong> rectifier is introduced; in<br />
Section III, the applied models <strong>of</strong> the <strong>LCL</strong> filter components<br />
are discussed; and in Section IV, the optimization algorithm <strong>for</strong><br />
the <strong>LCL</strong> filter is described. Simulation and experimental results<br />
0885-8993/$31.00 © 2012 IEEE
MÜHLETHALER et al.: OPTIMAL DESIGN OF <strong>LCL</strong> HARMONIC FILTERS FOR THREE-PHASE <strong>PFC</strong> RECTIFIERS 3115<br />
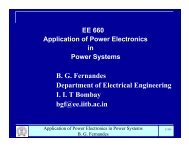
Fig. 1.<br />
(a) <strong>Three</strong>-phase <strong>PFC</strong> rectifier with <strong>LCL</strong> input filter. (b) Cross sections <strong>of</strong> inductors employed in the input filter.<br />
TABLE I<br />
SPECIFICATION OF THE THREE-PHASE <strong>PFC</strong> RECITIFIER<br />
is taken <strong>for</strong> the conductors. The windings are divided into two<br />
halves arranged on the two legs which lead to a more distributed<br />
winding structure. A more distributed winding structure has<br />
advantages such as better heat dissipation capabilities, lower<br />
inductor volume, etc.<br />
are given in Sections V and VI, respectively. In Section VII, the<br />
converter volume and losses are taken into consideration, i.e.,<br />
an overall system optimization is per<strong>for</strong>med.<br />
II. THREE-PHASE <strong>PFC</strong> RECTIFIER WITH INPUT FILTER<br />
The three-phase <strong>PFC</strong> rectifier investigated in this paper is<br />
shown in Fig. 1. The rectifier comprises in each phase a boost<br />
inductor L 2 , a damped LC filter L 1 /C/C d /R d , and a pair <strong>of</strong><br />
switches with free-wheeling diodes. The load is assumed to<br />
be a dc current source. The considered operating point <strong>of</strong> the<br />
<strong>PFC</strong> rectifier is described in Table I. A space vector modulation<br />
(SVM) scheme with loss-optimal clamping has been implemented<br />
to have a fundamental displacement factor <strong>of</strong> cos φ =1.<br />
In the applied SVM scheme with loss-optimal clamping, a<br />
switching <strong>of</strong> the phase with the highest current is omitted; hence,<br />
the switching losses are reduced accordingly. The functionality<br />
and the detailed control <strong>of</strong> the used SVM scheme are described<br />
in [9]. The three-phase <strong>PFC</strong> rectifier with input filter has been<br />
simulated in MATLAB/Simulink, where the nonlinearity <strong>of</strong> the<br />
core material <strong>of</strong> the inductors, i.e., the change <strong>of</strong> the inductance<br />
value with changing current, is taken into account.<br />
The three inductors L 1,a , L 1,b , and L 1,c , and the three capacitors<br />
C a , C b , and C c in star arrangement, together with the three<br />
boost inductors L 2,a , L 2,b , and L 2,c , result in a third-order <strong>LCL</strong><br />
low-pass filter between the mains and the switching stage. The<br />
capacitor/resistor branches C d,a /R d,a , C d,b /R d,b , and C d,c /R d,c<br />
are necessary to damp the resonance <strong>of</strong> the LC input filter. All<br />
inductors are assumed to have the same geometry, which is illustrated<br />
in Fig. 1(b). The cores are made <strong>of</strong> grain-oriented steel<br />
(M165-35S, lamination thickness 0.35 mm). Solid copper wire<br />
III. MODELING OF INPUT FILTER COMPONENTS<br />
The loss modeling is based on the framework introduced<br />
in [10], where a high level <strong>of</strong> accuracy has been achieved by<br />
combining the best state-<strong>of</strong>-the-art approaches and by embedding<br />
newly developed approaches into a novel loss calculation<br />
framework. In [10], the impact <strong>of</strong> the peak-to-peak flux density<br />
ΔB, frequency f, dc premagnetization H DC , temperature T ,<br />
core shape, minor and major BH-loops, flux wave<strong>for</strong>m, and<br />
material on the core loss calculation has been considered. In<br />
order to calculate the winding losses, <strong>for</strong>mulas <strong>for</strong> round conductors<br />
and litz wires, each considering skin and proximity<br />
effects and also considering the influence <strong>of</strong> an air gap fringing<br />
field have been included. In the following, a discussion about the<br />
implemented models <strong>for</strong> the employed inductors [cf., Fig. 1(b)]<br />
is given.<br />
A. Calculation <strong>of</strong> the Inductance<br />
The inductance <strong>of</strong> an inductive component with N winding<br />
turns and a total magnetic reluctance R m,tot is calculated as<br />
L = N 2<br />
R m,tot<br />
. (1)<br />
Accordingly, the reluctance <strong>of</strong> each section <strong>of</strong> the flux path<br />
has to be derived first in order to calculate R m,tot . The total<br />
reluctance <strong>for</strong> a general inductor is calculated as a function<br />
<strong>of</strong> the core reluctances and air gap reluctances. The core and<br />
air gap reluctances can be determined applying the methods<br />
described in [11]. The reluctances <strong>of</strong> the core depend on the<br />
relative permeability μ r which is defined by the nonlinear BHrelation<br />
<strong>of</strong> the core material; hence, the reluctance is described as<br />
a function <strong>of</strong> the flux. There<strong>for</strong>e, as the flux depends on the core<br />
reluctance and the reluctance depends on the flux, the system
3116 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 7, JULY 2013<br />
Fig. 2. Reluctance model <strong>of</strong> the inductor shown in Fig. 1(b). It consists <strong>of</strong> one<br />
voltage source (representing the two separated windings), one air gap reluctance<br />
R g (representing the two air gaps), and one core reluctance R c .<br />
can only be solved iteratively by using a numerical method. In<br />
the case at hand, the problem has been solved by applying the<br />
Newton approach.<br />
The reluctance model <strong>of</strong> the inductor shown in Fig. 1(b) is<br />
illustrated in Fig. 2. It consists <strong>of</strong> one voltage source (representing<br />
the two separated windings), one air gap reluctance R g<br />
(representing the two air gaps), and one core reluctance R c .The<br />
fact that the flux density in core parts very close to the air gap is<br />
(slightly) reduced as the flux lines already left the core has been<br />
neglected.<br />
B. Core Losses<br />
The applied core loss approach is described in [10] in detail<br />
and can be seen as a hybrid <strong>of</strong> the improved–improved Generalized<br />
Steinmetz Equation i 2 GSE [12] and a loss map approach:<br />
a loss map is experimentally determined and the interpolation<br />
and extrapolation <strong>for</strong> operating points in between the measured<br />
values is then made with the i 2 GSE.<br />
The flux density wave<strong>for</strong>m <strong>for</strong> which the losses have to be<br />
calculated is, e.g., simulated in a circuit simulator, where the<br />
magnetic part is modeled as a reluctance model. This simulated<br />
wave<strong>for</strong>m is then divided into its fundamental flux wave<strong>for</strong>m<br />
and into piecewise linear flux wave<strong>for</strong>m segments. The loss<br />
energy is then derived <strong>for</strong> the fundamental and all piecewise<br />
linear segments, summed up and divided by the fundamental<br />
period length in order to determine the average core loss. The dc<br />
flux level <strong>of</strong> each piecewise linear flux segment is considered, as<br />
this influences the core losses [13]. Furthermore, the relaxation<br />
term <strong>of</strong> the i 2 GSE is evaluated <strong>for</strong> each transition from one<br />
piecewise linear flux segment to another.<br />
Another aspect to be considered in the core loss calculation<br />
is the effect <strong>of</strong> the core shape/size. By introducing a reluctance<br />
model <strong>of</strong> the core, the flux density can be calculated. Subsequently,<br />
<strong>for</strong> each core section with (approximately) homogenous<br />
flux density, the losses can be determined. In the case at<br />
hand, the core has been divided into four straight core sections<br />
and four corner sections. The core losses <strong>of</strong> the sections are then<br />
summed up to obtain the total core losses.<br />
C. Winding Losses<br />
The second source <strong>of</strong> losses in inductive components is the<br />
ohmic losses in the windings. The resistance <strong>of</strong> a conductor<br />
increases with increasing frequency due to eddy currents. Selfinduced<br />
eddy currents inside a conductor lead to the skin effect.<br />
Fig. 3. Cross section <strong>of</strong> the round conductor considered with a current in<br />
z-direction. The conductor is infinitely large in z-direction.<br />
Eddy currents due to an external alternating magnetic field,<br />
e.g., the air gap fringing field or the magnetic field from other<br />
conductors, lead to the proximity effect.<br />
The sum <strong>of</strong> the dc losses and the skin effect losses per unit<br />
length in round conductors [cf., Fig. 3(a)] can be calculated<br />
as [14]<br />
and 1 F R (f) = ξ<br />
4 √ 2<br />
with δ =<br />
1 √ πμ0 σf ,ξ =<br />
P S = R DC · F R (f) · Î2 (2)<br />
( ber0 (ξ)bei 1 (ξ) − ber 0 (ξ)ber 1 (ξ)<br />
ber 1 (ξ) 2 + bei 1 (ξ) 2<br />
− bei )<br />
0(ξ)ber 1 (ξ)+bei 0 (ξ)bei 1 (ξ)<br />
ber 1 (ξ) 2 + bei 1 (ξ) 2<br />
(3)<br />
√ d<br />
2δ<br />
,R DC = 4<br />
σπd<br />
; δ is commonly<br />
2<br />
named the skin depth, f is the frequency, d is the conductor<br />
diameter, and σ is the electric conductivity <strong>of</strong> the conductor<br />
material.<br />
The proximity effect losses in round conductors [cf., Fig. 3(b)]<br />
per unit length can be calculated as [14]<br />
P P = R DC · G R (f) · Ĥ2 e (4)<br />
and<br />
G R (f) = − ξπ2 d 2 (<br />
2 √ ber2 (ξ)ber 1 (ξ)+ber 2 (ξ)bei 1 (ξ)<br />
2 ber 0 (ξ) 2 + bei 0 (ξ) 2<br />
+ bei )<br />
2(ξ)bei 1 (ξ) − bei 2 (ξ)ber 1 (ξ)<br />
ber 0 (ξ) 2 + bei 0 (ξ) 2 . (5)<br />
R DC is the resistance per unit length; hence, the losses P S and<br />
P P are losses per unit length as well. The external magnetic<br />
field strength H e <strong>of</strong> every conductor has to be known when<br />
calculating the proximity losses. In the case <strong>of</strong> an ungapped<br />
core and windings that are fully enclosed by core material,<br />
1-D approximations to derive the magnetic field exist. The most<br />
popular method is the Dowell method [16]. However, in the case<br />
<strong>of</strong> gapped cores, such 1-D approximations are not applicable as<br />
the fringing field <strong>of</strong> the air gap cannot be described in a 1-D<br />
manner. For the employed gapped cores, another approach has<br />
to be selected. The applied approach is a 2-D approach and is<br />
1 The solution <strong>for</strong> F R (and G R ) is based on a Bessel differential equation<br />
that has the <strong>for</strong>m x 2 y ′′ + xy ′ +(k 2 x 2 − v 2 )y =0. With the general solution<br />
y = C 1 J v (kx)+C 2 Y v (kx), whereas J v (kx) is known as Bessel function<br />
<strong>of</strong> the first kind and order v and Y v (kx) is known as Bessel function <strong>of</strong> the<br />
second kind and order v [15]. Furthermore, to resolve J v (kx) into its real and<br />
imaginary part, the Kelvin functions can be used: J v (j 3 2 x) =ber v x + jbei v x.
MÜHLETHALER et al.: OPTIMAL DESIGN OF <strong>LCL</strong> HARMONIC FILTERS FOR THREE-PHASE <strong>PFC</strong> RECTIFIERS 3117<br />
temperature. The ambient temperature T A isassumedtobe<br />
constant at 25 ◦ C.<br />
The heat transfer due to convection is described with<br />
P = αA(T L − T A ) (7)<br />
where P is the heat flow, A the surface area, T L the body surface<br />
temperature (i.e., inductor temperature), and T A the fluid (i.e.,<br />
ambient air) temperature. α is a coefficient that is determined<br />
by a set <strong>of</strong> characteristic dimensionless numbers, the Nusselt,<br />
Grash<strong>of</strong>, Prandtl, and Rayleigh numbers. Radiation has to be<br />
considered as a second important heat transfer mechanism and is<br />
described by the Stefan–Boltzmann law. Details about thermal<br />
modeling are not given here; the interested reader is referred<br />
to [18], from where the <strong>for</strong>mulas used in this paper have been<br />
taken.<br />
Fig. 4. (a) Illustration <strong>of</strong> the method <strong>of</strong> images (mirroring). (b) Illustration <strong>of</strong><br />
modeling an air gap as a fictitious conductor.<br />
Fig. 5.<br />
Thermal model with only one thermal resistance.<br />
described in detail in [10], where it has been implemented based<br />
on a previously presented work [17].<br />
The magnetic field at any position can be derived as the<br />
superposition <strong>of</strong> the fields <strong>of</strong> each <strong>of</strong> the conductors. The impact<br />
<strong>of</strong> a magnetic conducting material can further be modeled with<br />
the method <strong>of</strong> images, where additional currents that are the<br />
mirrored version <strong>of</strong> the original currents are added to replace<br />
the magnetic material [17]. In case <strong>of</strong> windings that are fully<br />
enclosed by magnetic material (i.e., in the core window), a new<br />
wall is created at each mirroring step as the walls have to be<br />
mirrored as well. The mirroring can be continued to pushing<br />
the walls away. This is illustrated in Fig. 4(a). For this study,<br />
the mirroring has been stopped after the material was replaced<br />
by conductors three times in each direction. The presence <strong>of</strong><br />
an air gap can be modeled as a fictitious conductor without<br />
eddy currents equal to the magneto-motive <strong>for</strong>ce across the air<br />
gap [17] as illustrated in Fig. 4(b).<br />
According to the previous discussion, the winding losses have<br />
to be calculated differently <strong>for</strong> the sections A and B illustrated<br />
in Fig. 1(b), as the mirroring leads to different magnetic fields.<br />
D. Thermal Modeling<br />
A thermal model is important when minimizing the filter volume,<br />
as the maximum temperature allowed is the limiting factor<br />
when reducing volume. The model used in this paper consists<br />
<strong>of</strong> only one thermal resistance R th and is illustrated in Fig. 5.<br />
The inductor temperature T L is assumed to be homogenous; it<br />
can be calculated as<br />
T L = T A + P loss R th (6)<br />
where P loss are the total losses occurring in the inductor, consisting<br />
<strong>of</strong> core and winding losses, and T A is the ambient<br />
E. Capacitor Modeling<br />
The filter and damping capacitors are selected from the EP-<br />
COS X2 MKP film capacitors series, which have a rated voltage<br />
<strong>of</strong> 305 V. The dissipation factor is specified as tan δ ≤ 1 W/kvar<br />
(at 1 kHz) [19], which enables the capacitor loss calculation. The<br />
capacitance density to calculate the capacitors volume can be<br />
approximated with 0.18 μF/cm 3 . The capacitance density has<br />
been approximated by dividing the capacitance value <strong>of</strong> several<br />
components by the according component volume.<br />
F. Damping Branch<br />
An LC filter is added between the boost inductor and the<br />
mains to meet a total harmonic distortion (THD) constraint.<br />
The additional LC filter changes the dynamics <strong>of</strong> the converter<br />
and may even increase the current ripple at the filter resonant<br />
frequency. There<strong>for</strong>e, a C d /R d damping branch has been added<br />
<strong>for</strong> damping. In [20] and [21], it is described how to optimally<br />
choose C d and R d . Basically, there is a trade<strong>of</strong>f between the<br />
size <strong>of</strong> damping capacitor C d and the damping achieved. For<br />
this study, C d = C has been selected as it showed to be a good<br />
compromise between additional volume needed and a reasonable<br />
damping achieved. Hence, the volume <strong>of</strong> the damping capacitor<br />
is the same as the volume <strong>of</strong> the filter capacitor. The<br />
value <strong>of</strong> the damping resistance that leads to optimal damping<br />
is then [20], [21]<br />
√<br />
R d = 2.1 L 1<br />
C . (8)<br />
The C d /R d damping branch increases the reactive power consumption<br />
<strong>of</strong> the <strong>PFC</strong> rectifier system. There<strong>for</strong>e, <strong>of</strong>ten other<br />
damping structures, such as the R f -L b series damping structure,<br />
are selected [21]. For this study, however, the C d /R d damping<br />
branch has been favored as its practical realization is easier<br />
and lower losses are expected. Furthermore, as will be seen in<br />
Section V, the reactive power consumption <strong>of</strong> the <strong>PFC</strong> rectifier<br />
system including the damped LC input filter is in the case at hand<br />
rather small, and, if necessary, it could be actively compensated<br />
by the rectifier.
3118 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 7, JULY 2013<br />
The losses in the damping branch, which occur mainly in<br />
the resistors, are calculated and taken into consideration in the<br />
optimization procedure as well.<br />
IV. OPTIMIZATION OF THE INPUT FILTER<br />
The aim is to optimally design a harmonic filter <strong>of</strong> the introduced<br />
three-phase <strong>PFC</strong> rectifier. For the evaluation <strong>of</strong> different<br />
filter structures, a cost function is defined that weights the filter<br />
losses and filter volume according to the designer needs. In the<br />
following, the steps toward an optimal design are described. All<br />
steps are illustrated in Fig. 6. The optimization constraints are<br />
discussed first.<br />
A. Optimization Constraints and Conditions<br />
The high-frequency ripple in the current i 2,a/b/c is limited<br />
to the value I HF,pp,max , which is important as a too high<br />
I HF,pp,max , e.g., impairs controllability (<strong>for</strong> instance, an accurate<br />
current measurement becomes more difficult). Furthermore,<br />
the THD <strong>of</strong> the mains current is limited. In industry, a typical<br />
value <strong>for</strong> the THD that is required at the rated operating point is<br />
5 % [22]. In the design at hand, a THD limit <strong>of</strong> 4 % is selected in<br />
order to have some safety margin. Two other design constraints<br />
are the maximum temperature T max and the maximum volume<br />
V max the filter is allowed to have. A fixed switching frequency<br />
f sw is assumed. The dc-link voltage V DC and the load current<br />
I L <strong>of</strong> the converter are also assumed to be given and constant.<br />
All constraints/condition values <strong>for</strong> the current system are given<br />
in Fig. 6.<br />
B. Calculation <strong>of</strong> L 2,min<br />
The minimum value <strong>of</strong> the inductance L 2,min can be calculated<br />
based on the constraint I HF,pp,max as<br />
L 2,min = δ (100) ·<br />
2<br />
3 V DC − √ 2V mains<br />
I HF,pp,max · f sw<br />
(9)<br />
with δ (100) = √ 3M<br />
2<br />
cos(π/6) the relative turn-on time <strong>of</strong> the<br />
space vector (100) when the current <strong>of</strong> phase a peaks. Equation<br />
(9) is based on the fact that, in case <strong>of</strong> a fundamental<br />
displacement factor <strong>of</strong> cos φ =1, the maximum current ripple<br />
I HF,pp,max occurs when the current reaches the peak value<br />
Î LF <strong>of</strong> the fundamental (at this instant, the voltage 2 3 V DC −<br />
√<br />
2Vmains<br />
becomes<br />
L 2,min =<br />
is across the inductor). With M = 2√ 2V mains<br />
V DC<br />
,(9)<br />
√<br />
3<br />
√<br />
2|Vmains |<br />
V DC<br />
cos(π/6) ·<br />
2<br />
3 V DC − √ 2V mains<br />
I HF,pp,max · f sw<br />
.<br />
(10)<br />
Fig. 6. <strong>Design</strong> procedure <strong>for</strong> three-phase <strong>LCL</strong> filters based on a generic optimization<br />
approach.<br />
C. Loss Calculation <strong>of</strong> Filter Components<br />
In the <strong>for</strong>egoing sections, it has been shown how an accurate<br />
loss modeling based on simulated current and voltage wave<strong>for</strong>ms<br />
is possible. However, such a calculation based on simulated<br />
wave<strong>for</strong>ms is time consuming and there<strong>for</strong>e, <strong>for</strong> an efficient<br />
optimization, simplifications have to be made. In Fig. 7, idealized<br />
current wave<strong>for</strong>ms <strong>for</strong> each filter component <strong>of</strong> a phase are<br />
Fig. 7.<br />
Idealized current wave<strong>for</strong>ms <strong>for</strong> each filter component.
MÜHLETHALER et al.: OPTIMAL DESIGN OF <strong>LCL</strong> HARMONIC FILTERS FOR THREE-PHASE <strong>PFC</strong> RECTIFIERS 3119<br />
illustrated. The current in L 1 is approximated as purely sinusoidal<br />
with a peak value <strong>of</strong><br />
Î = 2 I L V<br />
√ DC<br />
(11)<br />
3 2Vmains<br />
where V mains is the RMS value <strong>of</strong> the mains-phase voltage. A<br />
possible reactive current is rather small and has been neglected.<br />
With the mains frequency f mains =50Hz, losses, volume, and<br />
temperature <strong>of</strong> L 1 can be calculated.<br />
The current in L 2 has a fundamental (sinusoidal) component,<br />
with an amplitude as calculated in (11) and a fundamental frequency<br />
<strong>of</strong> f mains =50Hz, and a superimposed ripple current.<br />
The ripple current is, <strong>for</strong> the purpose <strong>of</strong> simplification, in a<br />
first step considered to be sinusoidal with constant amplitude<br />
I HF,pp,max over the mains period. The losses <strong>for</strong> the fundamental<br />
and the high-frequency ripple are calculated independently,<br />
and then summed up. By doing this, it is neglected that core<br />
losses depend on the dc bias condition.<br />
The ripple current is assumed to be fully absorbed by the filter<br />
capacitor C, hence, with the given dissipation factor tan δ, the<br />
losses in the capacitor can be calculated as well.<br />
How the a<strong>for</strong>ementioned simplifications affect the modeling<br />
accuracy will be discussed in Section V.<br />
D. Optimization Procedure<br />
After the optimization constraints and the simplifications chosen<br />
<strong>for</strong> the loss calculation have been described, the optimization<br />
procedure itself will be explained next.<br />
A filter design is defined by<br />
⎛<br />
⎞<br />
a L 1<br />
a L 2<br />
w L 1<br />
w L 2<br />
N L 1<br />
N L 2<br />
do<br />
X = L 1<br />
do L 2<br />
h L 1<br />
h L 2<br />
⎜ t L<br />
⎝<br />
1<br />
t L 2<br />
⎟<br />
⎠<br />
ww L 1<br />
ww L 2<br />
d L 1<br />
d L 2<br />
(12)<br />
where all inductor parameters are defined as in Fig. 1(b). The<br />
subscripts L 1 and L 2 describe to which inductor each parameter<br />
corresponds. The capacitance value <strong>of</strong> the filter capacitor<br />
is calculated based on the L 1 value to guarantee that the THD<br />
constraint is met. The parameters in X are varied by an optimization<br />
algorithm to obtain the optimal design. The optimization is<br />
based on the MATLAB function fminsearch() that applies the<br />
downhill simplex approach <strong>of</strong> Nelder and Mead [23].<br />
The optimization algorithm determines the optimal parameter<br />
values in X. A design is optimal when the cost function<br />
F = k Loss · q Loss · P + k Volume · q Volume · V (13)<br />
is minimized. k Loss and k Volume are weighting factors, q Loss<br />
and q Volume are proportionality factors, and P and V are the<br />
filter losses and filter volume, respectively. The proportionality<br />
factors are chosen such that, <strong>for</strong> a “comparable per<strong>for</strong>mance,”<br />
q Loss · P and q Volume · V are in the same range. 2 In the case<br />
at hand, this was achieved with q Loss =1/W and q Volume =<br />
3 · 10 4 /m 3 (these values differ a lot from case to case and,<br />
accordingly, are valid <strong>for</strong> the case at hand only).<br />
In order to calculate the volumes V L1 and V L2 <strong>of</strong> the inductors,<br />
their boxed volumes are calculated based on the parameters in<br />
X.<br />
The following steps are conducted to calculate the filter losses<br />
P and the filter volume V <strong>of</strong> (13) (cf., Fig. 6).<br />
1) Calculate the inductance value L 2 as a function <strong>of</strong> the<br />
current. Furthermore, the losses P L 2<br />
,thevolumeV L 2<br />
,<br />
and temperature T L 2<br />
<strong>of</strong> the boost inductors L 2 are calculated.<br />
In case a constraint cannot be met, the calculation is<br />
aborted and the design is discarded and a new design will<br />
be evaluated.<br />
2) Calculate the inductance value L 1 as a function <strong>of</strong> the<br />
current. Furthermore, the losses P L 1<br />
,thevolumeV L 1<br />
, and<br />
temperature T L 1<br />
<strong>of</strong> the filter inductors L 1 are calculated. In<br />
case a constraint cannot be met, the calculation is aborted<br />
and the design is discarded and a new design will be<br />
evaluated.<br />
3) For the purpose <strong>of</strong> simplification, the THD without filter<br />
is approximated with THD = I HF,pp,max /I (1),pp , where<br />
I (1),pp is the fundamental peak-to-peak value <strong>of</strong> the mains<br />
current. 3 Furthermore, it is assumed that the dominant harmonic<br />
content appears at f sw (this assumption is motivated<br />
by simulation results). The LC filter has then to attenuate<br />
the ripple current by<br />
( )<br />
A = 20 log 10 I(1),pp THD max /I HF,pp,max (14)<br />
(in dB) at a frequency <strong>of</strong> f sw . Therewith, C is calculated<br />
as<br />
C = 1<br />
1<br />
L 1 ω0<br />
2 =<br />
(15)<br />
L 1 (2πf sw · 10 A<br />
40 dB ) 2<br />
where ω 0 is the filter cut<strong>of</strong>f frequency. The losses and<br />
the volume <strong>of</strong> the capacitors and damping resistors can<br />
then be calculated. In case a constraint cannot be met, the<br />
calculation is aborted and the design is discarded and a<br />
new design will be evaluated.<br />
4) The volume, temperature, and losses are now known and<br />
the cost function (13) can be evaluated.<br />
The optimal matrix X is found by varying the matrix parameters,<br />
evaluating these matrixes by repeating previous steps, and<br />
minimizing the cost function (13). After the optimal design is<br />
found, the algorithm quits the loop <strong>of</strong> Fig. 6.<br />
2 The filter losses are in the range <strong>of</strong> approximately 100 W ...250 W, whereas<br />
the filter volumes are in the range <strong>of</strong> approximately 0.001 m 3 ...0.01 m 3 .<br />
With q Loss =1/W andq Volume =3· 10 4 /m 3 , the volume range is lifted to<br />
30 ...300 and therewith becomes comparable to the losses.<br />
√<br />
I 2 2 + I 2 3 + I 2 4 + ...+ I 2 n<br />
3 The THD is defined as THD =<br />
I 1<br />
,whereI n is the RMS<br />
value <strong>of</strong> the nth harmonic and I 1 is the RMS value <strong>of</strong> the fundamental current.<br />
Under the assumption that only the dominant harmonic content I HF,pp,max<br />
(which, <strong>for</strong> the purpose <strong>of</strong> simplification, is assumed to appear at one frequency)<br />
leads to a harmonic distortion, the THD becomes I HF,pp,max /I (1),pp ,<br />
consequently.
3120 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 7, JULY 2013<br />
Fig. 8. P –V Pareto front showing filter volumes V and filter losses P <strong>of</strong><br />
different optimal designs.<br />
V. OPTIMIZATION OUTCOMES<br />
The optimization procedure leads to different filter designs<br />
depending on the chosen weighting factors k 1 and k 2 in (13),<br />
i.e., depending whether the aim <strong>of</strong> the optimization is more<br />
on reducing the volume V or more on reducing the losses P .<br />
Limiting factors are the maximum temperature T max (limits<br />
the volume from being too low) and a maximum volume V max<br />
(limits the efficiency from being too high). Different designs are<br />
shown by a P –V plot, i.e., a P –V Pareto front in Fig. 8; the<br />
trade<strong>of</strong>f between losses and volume can be clearly identified.<br />
One design <strong>of</strong> Fig. 8 has been selected <strong>for</strong> further investigations.<br />
Particularly, a comparison between the (<strong>for</strong> the optimization<br />
procedure) simplified and the more elaborate calculation<br />
based on voltage/current wave<strong>for</strong>ms from a circuit simulator<br />
has been made. The filter parameters <strong>of</strong> the selected<br />
design are detailed in Fig. 8. The circuit <strong>of</strong> the three-phase<br />
<strong>PFC</strong> rectifier with the selected input filter has been simulated<br />
in MATLAB/Simulink, and the simulated current and voltage<br />
wave<strong>for</strong>ms have been taken to calculate the losses according<br />
to Section III. The results are given in Fig. 9. The THD constraint<br />
is met and the current I HF,pp,max is only insignificantly<br />
higher. The simplified loss calculation used <strong>for</strong> the optimization<br />
leads to an overestimation <strong>of</strong> the boost inductor losses. This is<br />
due to the fact that the maximum ripple current has been assumed<br />
to be constant over the mains period. The losses in the<br />
filter inductors, on the other hand, have been underestimated as<br />
any high-frequency ripple in the current through L 1 has been<br />
neglected in the simplified calculations. One could try to improve/change<br />
the simplifications made <strong>for</strong> the optimization and<br />
therewith improve the simplified loss calculation. However, the<br />
difference between the two calculation approaches has been<br />
considered as acceptable <strong>for</strong> this study.<br />
Another important design criteria is the achieved power factor.<br />
The reactive power consumption <strong>of</strong> the <strong>PFC</strong> rectifier system,<br />
including the damped LC input filter, is in the case at hand rather<br />
small (power factor = [real power]/[apparent power] = 0.998).<br />
So far, all results are based on simulations and calculations.<br />
The models have to be verified experimentally to prove the<br />
validity <strong>of</strong> the optimization procedure. In the following section,<br />
experimental results are shown.<br />
Fig. 9. Simulations and calculations to one selected design (cf., Fig. 8).<br />
(a) Filter inductor L 1,a . (b) Boost inductor L 2,a .<br />
VI. EXPERIMENTAL RESULTS<br />
Experimental measurements have been conducted to show<br />
that the previous introduced calculations are valid. The filter<br />
prototype built in the course <strong>of</strong> this study has been assembled<br />
<strong>of</strong> laminated sheets and coil <strong>for</strong>mers <strong>of</strong> standard sizes, in order<br />
to keep the cost low. This avoids an exact implementation <strong>of</strong> an<br />
optimum as can be seen in Fig. 8 (the prototype built is not on the<br />
8 kHz-line). However, this does not impair the significance <strong>of</strong> the<br />
measurement results. Specifications, dimensions, and photos <strong>of</strong><br />
the <strong>LCL</strong> filter built are given in Fig. 10. All measurements have<br />
been carried out with a Yokogawa WT3000 Precision Power<br />
Analyzer.<br />
The measurements have been conducted with the T-type converter<br />
introduced in [24]. In Fig. 11, a photo <strong>of</strong> the converter is<br />
given. The T-type converter is a three-level converter; however,<br />
a two-level operation is possible as well. A two-level operation<br />
with the same modulation scheme (optimal-loss clamping<br />
modulation scheme) as in the MATLAB simulation has been<br />
implemented.<br />
The results <strong>of</strong> the comparative measurements and simulations<br />
are given in Figs. 12 and 13. As can be seen, the calculated and<br />
measured loss values are very close to each other. The maximum<br />
current ripple in the actual system is (slightly) higher than<br />
in the simulation. This can be explained by the fact that in the<br />
simulation the inductance <strong>of</strong> the boost inductor is assumed to be<br />
constant over the full frequency range. However, in reality, the
MÜHLETHALER et al.: OPTIMAL DESIGN OF <strong>LCL</strong> HARMONIC FILTERS FOR THREE-PHASE <strong>PFC</strong> RECTIFIERS 3121<br />
Fig. 12. (a) Simulations and (b) measurements on one <strong>of</strong> the filter inductors<br />
L 1 <strong>of</strong> the implemented design.<br />
Fig. 10. Specifications, dimensions and photos <strong>of</strong> (a) one filter inductor L 1 ,<br />
(b) all filter and damping capacitors/resistors C, C d ,andR d , and (c) one boost<br />
inductor L 2 .<br />
VII. OVERALL RECTIFIER OPTIMIZATION<br />
As can be seen in Fig. 8, an increase in switching frequency<br />
leads to lower filter losses and lower filter volumes. However, in<br />
return, an increase in switching frequency leads to higher switching<br />
losses in the converter semiconductors. In other words, it is<br />
important to consider the system as a whole in order to achieve<br />
a truly optimal design. In the following, first, a model <strong>for</strong> the<br />
converter is derived, which allows to determine a P –V Pareto<br />
front <strong>of</strong> the converter. Later, the trade<strong>of</strong>f in the switching frequency<br />
is illustrated and the optimal frequency <strong>for</strong> the overall<br />
system is determined.<br />
Fig. 11.<br />
Photo <strong>of</strong> the <strong>PFC</strong> converter.<br />
effective inductance decreases with increasing frequency due<br />
to inductor losses and parasitic capacitances. The higher THD<br />
value can also be explained with the same effect since the filter<br />
inductance decreases with increasing frequency as well. The frequency<br />
behavior could be modeled analytically by representing<br />
the inductors as RLC networks.<br />
A. Overall Optimized <strong>Design</strong>s<br />
The Infineon Trench and Field Stop 1200 V IGBT4 series<br />
has been selected to determine the P –V pareto front <strong>of</strong> the converter.<br />
These semiconductors are the same as the ones employed<br />
in the converter <strong>of</strong> Fig. 11. A converter model has been set up,<br />
which determines the junction temperature <strong>of</strong> the transistors<br />
T j,T , the junction temperature <strong>of</strong> the diodes T j,D ,thevolume<br />
<strong>of</strong> the converter V , and the losses <strong>of</strong> the converter P . As input<br />
variables, it needs the transistor chip area A T , the diode chip<br />
area A D , the cooling system volume V CS , and the operating<br />
point defined by the switching frequency f sw , and peak-to-peak<br />
fundamental current I (1),pp . The high-frequency ripple current<br />
I HF,pp has, as long as I HF,pp ≪ I (1),pp , only a negligible impact<br />
on the losses and is therewith not taken into consideration.
3122 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 7, JULY 2013<br />
where CSPI =15W/(K · L) can be approximated to be constant<br />
<strong>for</strong> a given cooling concept. The value 15 W/(K · L) has been<br />
calculated <strong>for</strong> the cooling concept <strong>of</strong> the converter shown in<br />
Fig. 11 according to [27]. According to [25], <strong>for</strong> the selected<br />
insulated-gate bipolar transistor (IGBT) series, the junction to<br />
sink surface thermal resistance R th,js can be approximated as a<br />
function <strong>of</strong> the chip area as<br />
K<br />
R th,js =23.94<br />
W · mm 2 · A−0.88 . (17)<br />
The switching and conduction losses per chip area have been<br />
extracted from data sheets. Different IGBTs with different current<br />
ratings, but from the same IGBT series have been analyzed.<br />
To determine the losses as a function <strong>of</strong> the chip area, the IGBT<br />
and diode chip area as a function <strong>of</strong> the nominal chip current I N<br />
has to be known. This chip area-current dependency has been<br />
taken from [25] and is <strong>for</strong> the transistor<br />
Fig. 13. (a) Simulations and (b) measurements on one <strong>of</strong> the boost inductors<br />
L 2 <strong>of</strong> the implemented design.<br />
Fig. 14.<br />
Illustration <strong>of</strong> a converter model.<br />
TABLE II<br />
CONSTRAINTS AND CONDITIONS FOR CONVERTER OPTIMIZATION<br />
The inputs and outputs <strong>of</strong> the converter model are illustrated in<br />
Fig. 14 and all optimization constraints and conditions are listed<br />
in Table II. This optimization based on the semiconductor chip<br />
area is motivated by previously presented works [25], [26].<br />
The thermal resistance <strong>of</strong> the cooling system, i.e., the heat sink<br />
surface to ambient thermal resistance R th,sa , has been modeled<br />
with the cooling system per<strong>for</strong>mance index (CSPI) [27]; the<br />
R th,sa is then calculated as<br />
R th,sa =<br />
1<br />
CSPI · V CS<br />
(16)<br />
A T =0.95 mm2<br />
A · I N +3.2 mm 2 (18)<br />
and <strong>for</strong> the diode<br />
A D =0.47 mm2<br />
A · I N +3.6 mm 2 . (19)<br />
The switching losses scaled to the same current do not vary much<br />
with the chip size in the considered range, as a comparison <strong>of</strong><br />
different data sheets <strong>of</strong> the selected IGBT series has shown;<br />
there<strong>for</strong>e, <strong>for</strong> this study, the switching loss energies have been<br />
considered as independent <strong>of</strong> the chip area. The switching loss<br />
energies have been extracted at two junction temperatures (25 ◦ C<br />
and 150 ◦ C) and, <strong>for</strong> intermediate temperatures, a linear interpolation<br />
has been made. These, from the data sheet extracted and<br />
interpolated, switching loss energies are then assigned to each<br />
switching instant in order to determine the switching losses.<br />
In return, the conduction losses depend substantially on the<br />
chip size area. This has been modeled as in [26], but with taking<br />
the impact <strong>of</strong> the temperature into consideration. The following<br />
equation describes the conduction losses<br />
P cond (A, i, T j,T /D )=V f · i + R on,N(T j,T /D ) · A N<br />
· i 2<br />
A<br />
(20)<br />
where V f is the <strong>for</strong>ward voltage drop, R on,N (T j,T /D ) is the<br />
nominal on-resistance, A N is the nominal chip size area (to<br />
which R on,N (T j,T /D ) is taken from the data sheet), i is the current<br />
through the transistor, and A is the actual chip size area. The<br />
on-resistance has been extracted at two junction temperatures<br />
(25 ◦ C and 150 ◦ C) and, <strong>for</strong> intermediate on-resistance values,<br />
a linear interpolation has been made. The current i has been<br />
calculated <strong>for</strong> the chosen modulation scheme. Equation (20) is<br />
evaluated with different values <strong>for</strong> V f and R on,N , depending<br />
whether the conduction losses <strong>of</strong> the transistor or the diode are<br />
calculated.<br />
The converter volume is the sum <strong>of</strong> the cooling system volume,<br />
the dc-link capacitor volume, and the volume <strong>of</strong> the switching<br />
devices. The switching device volume has been calculated<br />
by multiplying the chip areas by a depth <strong>of</strong> 1 cm in order to<br />
approximate the transistor volume. The cooling system volume<br />
is known as it is a model input parameter. The dc-link capacitor
MÜHLETHALER et al.: OPTIMAL DESIGN OF <strong>LCL</strong> HARMONIC FILTERS FOR THREE-PHASE <strong>PFC</strong> RECTIFIERS 3123<br />
Fig. 15. P –V Pareto front showing converter volumes V and converter losses<br />
P <strong>of</strong> different optimal designs.<br />
C DC has been selected such that the dc-link voltage in case <strong>of</strong><br />
an abrupt load drop from nominal load to zero load does not exceed<br />
a predefined value. The maximum dc-link voltage increase<br />
ΔV DC after the load drop can then be approximated as<br />
ΔV DC = 1<br />
√<br />
3 2Vmains<br />
·<br />
C DC 2 V DC<br />
(<br />
Î2<br />
f sw<br />
+ 1 2Î2t max<br />
)<br />
where Î2 is the peak value <strong>of</strong> the phase current through the<br />
boost inductor L 2 and t max is the time difference between the<br />
moment where the system sampled the load drop (i.e., latest<br />
1/f sw after the load drop occurred, since the sampling interval<br />
is 1/f sw ) and the moment where the dc-link voltage peaks (i.e.,<br />
V DC +ΔV DC is reached). The chosen value <strong>for</strong> the maximum<br />
voltage overshoot is ΔV DC =50V. The dc-link capacitors have<br />
been selected from the EPCOS MKP dc-link film capacitors<br />
series, which have a rated voltage <strong>of</strong> 800 V. The capacitor losses<br />
are low and, therewith, have been neglected. The capacitance<br />
density to calculate the capacitors volume can be approximated<br />
with 0.6 μF/cm 3 .<br />
The losses and volumes <strong>of</strong> other system parts, such as the DSP,<br />
auxiliary supply, gate driver, etc., have not been considered.<br />
An optimization algorithm has been set up similar to that <strong>of</strong><br />
the filter. A design is characterized by the parameters A T , A D ,<br />
and V CS . The optimization algorithm varies these parameter<br />
in order to find optimal designs. The optimization procedure<br />
leads to different designs depending whether the aim <strong>of</strong> the<br />
optimization is more on reducing the volume V or more on<br />
reducing the losses P . Different designs are shown by a P –V<br />
plot, i.e., a P –V Pareto front in Fig. 15; the trade<strong>of</strong>f between<br />
losses and volume can be clearly identified. It becomes clear that<br />
a higher switching frequency leads to higher losses; there<strong>for</strong>e,<br />
there must exist an overall optimal switching frequency at which<br />
the system losses are minimized.<br />
Basically, one can combine the results from the filter and<br />
from the converter and, therewith, determine the overall system<br />
per<strong>for</strong>mance. The losses <strong>of</strong> loss optimized designs <strong>for</strong> different<br />
frequencies have been calculated and are shown in Fig. 16(a).<br />
In the case at hand, the optimal switching frequency is at approximately<br />
5–6 kHz. In Fig. 16(b), the losses <strong>of</strong> a volumetric<br />
optimized designs are given <strong>for</strong> different frequencies; it can be<br />
seen that the optimal switching frequency is in the same range.<br />
Fig. 16. (a) Losses <strong>of</strong> loss optimized designs <strong>for</strong> different frequencies.<br />
(b) Losses <strong>of</strong> volumetric optimized designs <strong>for</strong> different frequencies.<br />
Fig. 17.<br />
Volume <strong>of</strong> volumetric optimized designs <strong>for</strong> different frequencies.<br />
In case <strong>of</strong> loss-optimized designs, the major volume part<br />
comes from the filter volume. This becomes clear when Fig. 8<br />
is compared with Fig. 15: the maximum filter volume is much<br />
higher than the maximum converter volume. This has to do<br />
with the selected constraints; however, a further increase <strong>of</strong><br />
the converter volume would not have a big impact in further<br />
decreasing the losses; there<strong>for</strong>e, it can be concluded that the<br />
constraints have been selected well.<br />
In Fig. 17, the volume <strong>of</strong> volumetric optimized designs <strong>for</strong><br />
different frequencies is plotted. As both, the filter size and the<br />
converter size, decrease with increasing frequencies, a high frequency<br />
is favorable with respect to system size. The converter<br />
size decreases with increasing frequency because the dc-link<br />
capacitance reduces with increasing frequency. The fact that the<br />
volume decreases with increasing switching frequency is only<br />
true in a limited frequency range; above this frequency range,<br />
the losses become very high and the size <strong>of</strong> the components
3124 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 7, JULY 2013<br />
increases again so that the heat can be dissipated. This effect is<br />
not visible here.<br />
VIII. CONCLUSION AND FUTURE WORK<br />
A design procedure <strong>for</strong> three-phase <strong>LCL</strong> filters based on a<br />
generic optimization approach is introduced guaranteeing low<br />
volume and/or low losses. The cost function, which characterizes<br />
a given filter design, allows a weighting <strong>of</strong> the filter losses<br />
and <strong>of</strong> the filter volume according to the designer’s need. Different<br />
designs have been calculated to show the trade<strong>of</strong>f between<br />
filter volume and filter losses. Experimental results have shown<br />
that a very high loss accuracy has been achieved. To improve<br />
the THD and current ripple accuracy, the frequency behavior <strong>of</strong><br />
the inductors could be modeled as well.<br />
As can be seen in Fig. 8, a higher switching frequency leads<br />
to lower filter volume, or, when keeping the volume constant,<br />
to lower filter losses. However, higher switching losses are expected<br />
in case <strong>of</strong> higher switching frequencies. There<strong>for</strong>e, an<br />
overall system optimization, i.e., an optimization <strong>of</strong> the complete<br />
three-phase <strong>PFC</strong> rectifier including the filter, has been<br />
per<strong>for</strong>med. Generally, it is important to consider the system<br />
to be optimized as a whole, since there are parameters that<br />
bring advantages <strong>for</strong> one subsystem while deteriorating another<br />
subsystem.<br />
ACKNOWLEDGMENT<br />
The authors would like to thank ABB Switzerland, Ltd., <strong>for</strong><br />
giving them the opportunity to work on this very interesting<br />
project.<br />
REFERENCES<br />
[1] J. W. Kolar, J. Biela, S. Waffler, T. Friedli, and U. Badstuebner, “Per<strong>for</strong>mance<br />
trends and limitations <strong>of</strong> power electronic systems,” in Proc. 6th<br />
Int. Conf. Integr. Power Electron. Syst., 2010, pp. 1–20.<br />
[2] R. Yu, B. Pong, B. Ling, and J. Lam, “Two-stage optimization method<br />
<strong>for</strong> efficient power converter design including light load operation,” IEEE<br />
Trans. Power Electron., vol. 27, no. 3, pp. 1327–1337, Mar. 2012.<br />
[3] C. Larouci, M. Boukhnifer, and A. Chaibet, “<strong>Design</strong> <strong>of</strong> power converters<br />
by optimization under multiphysic constraints: Application to a two-timescale<br />
AC/DC-DC converter,” IEEE Trans. Ind. Electron., vol. 57, no. 11,<br />
pp. 3746–3753, Nov. 2010.<br />
[4] S. Busquets-Monge, J.-C. Crebier, S. Ragon, E. Hertz, D. Boroyevich,<br />
Z. Gurdal, M. Arpilliere, and D. Lindner, “<strong>Design</strong> <strong>of</strong> a boost power factor<br />
correction converter using optimization techniques,” IEEE Trans. Power<br />
Electron., vol. 19, no. 6, pp. 1388–1396, Nov. 2004.<br />
[5] P. Pelletier, J. Guichon, and J. Schanen, “Optimization <strong>of</strong> a dc capacitor<br />
tank,” in Proc. Conf. Rec. 40th IAS Annu. Meet. Ind. Appl. Conf., Oct.<br />
2005, vol. 2, pp. 1470–1474.<br />
[6] J. Zientarski, R. Beltrame, D. Candido, M. Martins, and H. Hey, “<strong>Design</strong><br />
methodology <strong>for</strong> universal line input boost power factor correction<br />
magnetics,” IET Power Electron., vol. 4, pp. 715–724, Jul. 2011.<br />
[7] M. Liserre, F. Blaabjerg, and S. Hansen, “<strong>Design</strong> and control <strong>of</strong> an <strong>LCL</strong>filter-based<br />
three-phase active rectifier,” IEEE Trans. Ind. Appl., vol. 41,<br />
no. 5, pp. 1281–1291, Sep./Oct. 2005.<br />
[8] S. V. Araujo, A. Engler, B. Sahan, and F. Antunes, “<strong>LCL</strong> filter design <strong>for</strong><br />
grid-connected NPC inverters in <strong>of</strong>fshore wind turbines,” in Proc. 7th Int.<br />
Conf. Power Electron., 2007, pp. 1133–1138.<br />
[9] T. Friedli, “Comparative evaluation <strong>of</strong> three-phase Si and SiC AC-AC<br />
converter systems” Ph.D. dissertation, ETH Zurich, Switzerland, 2010.<br />
[10] J. Mühlethaler, J. W. Kolar, and A. Ecklebe, “Loss modeling <strong>of</strong> inductive<br />
components employed in power electronic systems,” in Proc. 8th Int. Conf.<br />
Power Electron., 2011, pp. 945–952.<br />
[11] J. Mühlethaler, J. W. Kolar, and A. Ecklebe, “A novel approach <strong>for</strong> 3D<br />
air gap reluctance calculations,” in Proc. 8th Int. Conf. Power Electron.,<br />
2011, pp. 446–452.<br />
[12] J. Mühlethaler, J. Biela, J. W. Kolar, and A. Ecklebe, “Improved core loss<br />
calculation <strong>for</strong> magnetic components employed in power electronic systems,”<br />
in Proc. Appl. Power Electron. Conf. Expo., Mar. 2011, pp. 1729–<br />
1736.<br />
[13] J. Mühlethaler, J. Biela, J. W. Kolar, and A. Ecklebe, “Core losses under<br />
DC bias condition based on Steinmetz parameters,” in Proc. IEEE/IEEJ<br />
Int. Power Electron. Conf., Jun. 2010, pp. 2430–2437.<br />
[14] J. Lammeraner and M. Stafl, Eddy Currents. London, U.K.: Iliffe Books,<br />
1966.<br />
[15] L. C. Andrews, Elementary Partial Differential Equations With Boundary<br />
Value Problems. New York: Academic Press, 1986.<br />
[16] P. Dowell, “Effects <strong>of</strong> eddy currents in trans<strong>for</strong>mer windings,” Proc. Inst.<br />
Electr. Eng., vol. 113, no. 8, pp. 1387–1394, 1966.<br />
[17] A. V. den Bossche and V. C. Valchev, Inductors and Trans<strong>for</strong>mers <strong>for</strong><br />
Power Electronics. Boca Raton, FL: CRC Press/Taylor Francis Group,<br />
2005.<br />
[18] VDI Gesellschaft, VDI Heat Atlas. Heidelberg/Berlin, Germany:<br />
Springer-Verlag, 2010.<br />
[19] Film Capacitors, EPCOS AG, Munich, Germany, 2009.<br />
[20] R. D. Middlebrook, “<strong>Design</strong> techniques <strong>for</strong> preventing input filter oscillations<br />
in switched-mode regulators,” in Proc. Nat. Solid-State Power<br />
Convers. Conf., 1978, pp. A3.1–A3.16.<br />
[21] R. W. Erickson and D. Maksimovic, Fundamentals <strong>of</strong> Power Electronics.<br />
New York: Springer, 2004.<br />
[22] J. W. Kolar and T. Friedli, “The essence <strong>of</strong> three-phase <strong>PFC</strong> rectifier<br />
systems,” in Proc. 33rd IEEE Int. Telecommun. Energy Conf., Amsterdam,<br />
Netherlands, Oct. 2011, pp. 1–27.<br />
[23] J. A. Nelder and R. Mead, “A simplex method <strong>for</strong> function minimization,”<br />
Comput. J., vol. 4, pp. 308–313, 1965.<br />
[24] M. Schweizer and J. W. Kolar, “High efficiency drive system with<br />
3-level t-type inverter,” in Proc. 14th Eur. Conf. Power Electron. Appl.,<br />
Birmingham, U.K., Aug. 30–Sep. 1, 2011.<br />
[25] T. Friedli and J. W. Kolar, “A semiconductor area based assessment <strong>of</strong> ac<br />
motor drive converter topologies,” in Proc. 24th Annu. IEEE Appl. Power<br />
Electron. Conf. Expo., Feb. 2009, pp. 336–342.<br />
[26] M. Schweizer, I. Lizama, T. Friedli, and J. W. Kolar, “Comparison <strong>of</strong> the<br />
chip area usage <strong>of</strong> 2-level and 3-level voltage source converter topologies,”<br />
in Proc. 36th Annu. Conf. IEEE Ind. Electron. Soc., Nov. 2010, pp. 391–<br />
396.<br />
[27] U. Dr<strong>of</strong>enik, G. Laimer, and J. W. Kolar, “Theoretical converter power<br />
density limits <strong>for</strong> <strong>for</strong>ced convection cooling,” in Proc. Int. PCIM Eur.<br />
Conf., Nuremberg, Germany, 2005, pp. 608–619.<br />
Jonas Mühlethaler (S’09) received the M.Sc. and<br />
Ph.D. degrees from the Swiss Federal Institute <strong>of</strong><br />
Technology Zurich (ETHZ), Zurich, Switzerland, in<br />
2008 and 2012, respectively, both in electrical engineering.<br />
During his master studies, he focused on<br />
power electronics and electrical machines and involved<br />
on compensating torque pulsation in permanent<br />
magnet motors. During the Ph.D. studies, he<br />
was involved on modeling and multiobjective optimization<br />
<strong>of</strong> inductive power components.<br />
He is currently a Postdoctoral Fellow at Power<br />
Electronic Systems Laboratory, ETHZ.<br />
Mario Schweizer (S’09) was born in Switzerland on<br />
February 20, 1983. He studied electrical engineering<br />
at ETH Zurich, Zurich, Switzerland. During his studies,<br />
he focussed on power electronics, mechatronics<br />
and energy systems. He received the M.Sc. degree<br />
in May 2008. His Master thesis research involved<br />
implementation <strong>of</strong> a new control hardware and different<br />
control strategies <strong>for</strong> an ultra sparse matrix<br />
converter. He has been working toward the Ph.D.<br />
degree at the Power Electronic Systems Laboratory<br />
since July 2008.<br />
His current research interests include eco’intelligent drive systems and gridfriendly<br />
active rectifier interfaces.
MÜHLETHALER et al.: OPTIMAL DESIGN OF <strong>LCL</strong> HARMONIC FILTERS FOR THREE-PHASE <strong>PFC</strong> RECTIFIERS 3125<br />
Robert Blattmann received the M.Sc. degree in electrical<br />
engineering from the Swiss Federal Institute<br />
<strong>of</strong> Technology Zurich, Zurich, Switzerland, in 2011.<br />
During his master studies, he focused on power electronics<br />
and energy systems and was involved on a<br />
new concept <strong>for</strong> a magnetic bearing system.<br />
In 2012, he joined the Trainee Program <strong>of</strong> ABB<br />
Switzerland, Ltd., Baden, Switzerland.<br />
Group.<br />
Andreas Ecklebe (M’07) received the Dipl.-Ing. and<br />
Dr.-Ing. degrees from the Otto-von-Guericke University,<br />
Magdeburg, Germany, in 2002 and 2009, respectively,<br />
both in electrical engineering.<br />
From 2002 to 2004, he was with SMS Demag<br />
AG and Alstom Power Conversion, where he was involved<br />
in the design <strong>of</strong> technological control systems<br />
<strong>for</strong> large-scale industrial automation solutions. Since<br />
2008, he has been with ABB Corporate Research,<br />
Baden-Daettwil, Switzerland, where he is currently<br />
leading the Power Electronics Integration Research<br />
Johann W. Kolar (S’89–M’91–SM’04–F’10) received<br />
the M.Sc. and Ph.D. degrees (summa cum<br />
laude/promotio sub auspiciis praesidentis rei publicae)<br />
from the University <strong>of</strong> Technology Vienna,<br />
Vienna, Austria.<br />
Since 1984, he has been an Independent International<br />
Consultant in close collaboration with the University<br />
<strong>of</strong> Technology Vienna, in the fields <strong>of</strong> power<br />
electronics, industrial electronics and high per<strong>for</strong>mance<br />
drives. He has proposed numerous novel converter<br />
topologies and modulation/control concepts,<br />
e.g., the VIENNA Rectifier, the Swiss Rectifier, and the three-phase ac–ac<br />
sparse matrix converter. He has published more than 450 scientific papers in<br />
international journals and conference proceedings and has filed more than 85<br />
patents. He became a Pr<strong>of</strong>essor and Head <strong>of</strong> the Power Electronic Systems<br />
Laboratory, Swiss Federal Institute <strong>of</strong> Technology (ETH) Zurich, on February<br />
1, 2001. His current research interests include ac–ac and ac–dc converter<br />
topologies with low effects on the mains, e.g., <strong>for</strong> data centers, more-electricaircraft<br />
and distributed renewable energy systems, and solid-state trans<strong>for</strong>mers<br />
<strong>for</strong> smart microgrid systems. Further main research interests include the realization<br />
<strong>of</strong> ultracompact and ultraefficient converter modules employing latest<br />
power semiconductor technology (SiC and GaN), micropower electronics and/or<br />
power supplies on chip, multidomain/scale modeling/simulation and multiobjective<br />
optimization, physical model-based lifetime prediction, pulsed power,<br />
and ultrahigh speed and bearingless motors.<br />
Dr. Kolar has been appointed the IEEE Distinguished Lecturer by the IEEE<br />
Power Electronics Society (PELS) in 2011. He received the IEEE Transactions<br />
Prize Paper Award <strong>of</strong> the IEEE Illuminating Engineering Society in 2005, <strong>of</strong><br />
the IEEE Institute <strong>of</strong> Aeronautical Sciences in 2009 and 2010, the IEEE/ASME<br />
in 2010, and <strong>of</strong> the IEEE PELS in 2009, 2010, and 2011. He also received the<br />
Best Paper Award at the International Conference on Per<strong>for</strong>mance Engineering<br />
2007, the IAS 2008, the IECON 2009, the International Symposium on Parameterized<br />
and Exact Computation 2010 (<strong>for</strong> two papers), the Energy Conversion<br />
Congress and Exposition (ECCE) Asia 2011, and the ECCE USA 2011. Furthermore,<br />
he received the ETH Zurich Golden Owl Award 2011 <strong>for</strong> Excellence<br />
in Teaching and an Erskine Fellowship from the University <strong>of</strong> Canterbury, New<br />
Zealand, in 2003. He initiated and/or is the founder/c<strong>of</strong>ounder <strong>of</strong> four spin<strong>of</strong>f<br />
companies targeting ultrahigh speed drives, multidomain/level simulation,<br />
ultracompact/efficient converter systems, and pulsed power/electronic energy<br />
processing. In 2006, the European Power Supplies Manufacturers Association<br />
awarded the Power Electronics Systems Laboratory <strong>of</strong> ETH Zurich as the Leading<br />
Academic Research Institution in Power Electronics in Europe. He is a<br />
member <strong>of</strong> the IEEJ and <strong>of</strong> International Steering Committees and Technical<br />
Program Committees <strong>of</strong> numerous international conferences in the field (e.g.,<br />
Director <strong>of</strong> the Power Quality Branch <strong>of</strong> the International Conference on Power<br />
Conversion and Intelligent Motion). He is the founding Chairman <strong>of</strong> the IEEE<br />
PELS Austria and Switzerland Chapter and Chairman <strong>of</strong> the Education Chapter<br />
<strong>of</strong> the EPE Association. From 1997 to 2000, he has been serving as an Associate<br />
Editor <strong>of</strong> the IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS and<br />
since 2001 as an Associate Editor <strong>of</strong> the IEEE TRANSACTIONS ON POWER ELEC-<br />
TRONICS. Since 2002, he has been an Associate Editor <strong>of</strong> the Journal <strong>of</strong> Power<br />
Electronics <strong>of</strong> the Korean Institute <strong>of</strong> Power Electronics and a member <strong>of</strong> the<br />
Editorial Advisory Board <strong>of</strong> the IEEJ Transactions on Electrical and Electronic<br />
Engineering.