
PID控制参数调试深谈
今天,接着上篇文章继续谈个人对PID控制器参数调节的理解。
一般实际工程控制中,微分控制使用确实较少,最常用的是PI控制器。假如我们不能加微分调节,还有没有其他办法能让PI控制器的响应曲线更好呢?答案肯定有很多种,我知道的有以下几种可操作方法,写出来供参考。
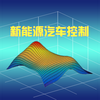
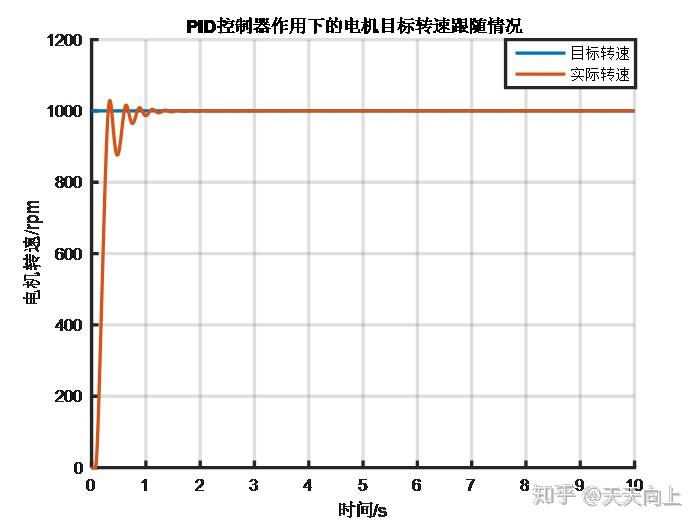
为对比方便,把上文中原始的PI控制器响应曲线搬过来放在这,如下图。

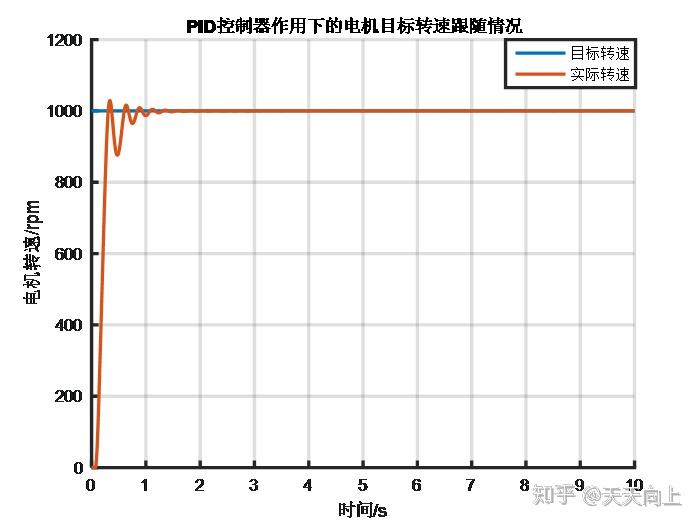
方法一:目标值滤波,使其从初始值渐变至目标值(上文已介绍)。
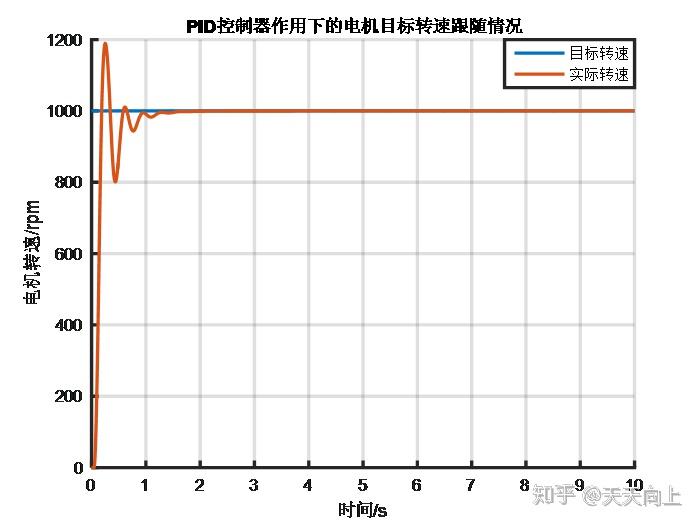
把电机目标转速1000rpm进行一个低通滤波后,再给到PID控制器作为目标值,选取Kp=0.005,Ki=0.015,仿真结果如下图。与原始的PI控制器相比,响应速度稍慢一些,但超调量大大减小,稳定性有所提高。

本方法的核心思想是,对PI控制器的输入即偏差信号进行处理,使其缓慢变化,PI控制器可以跟着偏差信号逐渐调整,可提高系统稳定性。
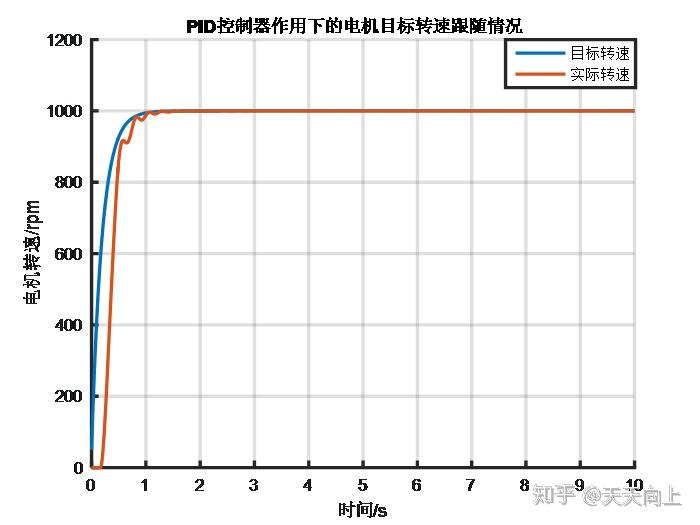
方法二:PI控制器输出进行适当的限制。
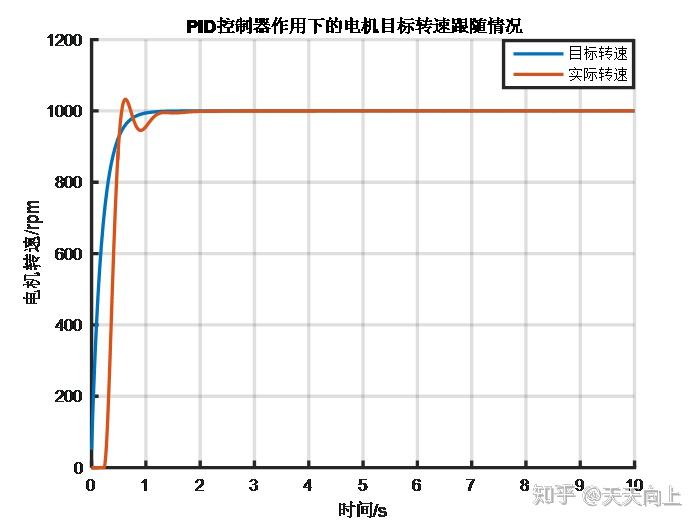
对于我们这个电机转速控制仿真,PI控制器的输出是电机的实际电压,默认给定的限制范围与电机电气特性一致,为0~12V。而上文对电机稳态下的电压计算结果为3.2V左右,所以对于动态响应过程,给定一个稍大一点的动态调整范围,一般比稳态大20%~30%即可,这里我们把PI控制器输出限制从12V改为4V,选取Kp=0.1,Ki=0.2,仿真结果如下图所示。与原始的PI控制器相比,响应速度稍慢一些,但超调量几乎没有,稳定性大大提高。

本方法的核心思想是,如果已知稳态情况下的PI控制器输出大小,或者能估计出大概范围,可以在稳态值基准上增加30%作为PI控制器输出限制量,可有效地减小超调量。
方法三:PI参数可根据需要动态变化。
原始的PI控制器使用固定的PI参数,不能根据偏差量实时调整控制量,无法很好地解决超调的问题。一般地,偏差较大时,PI参数可以稍小一点,避免超调太大;偏差较小时,PI参数可以稍大一些,在保证超调可控的前提下让快稳的性能尽量好。
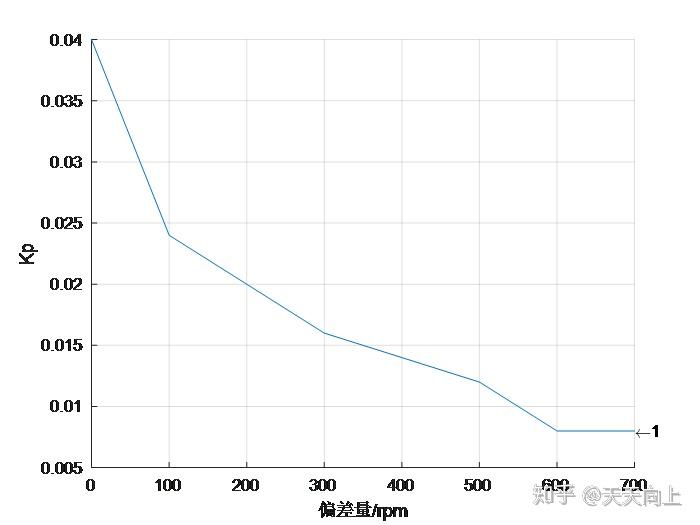
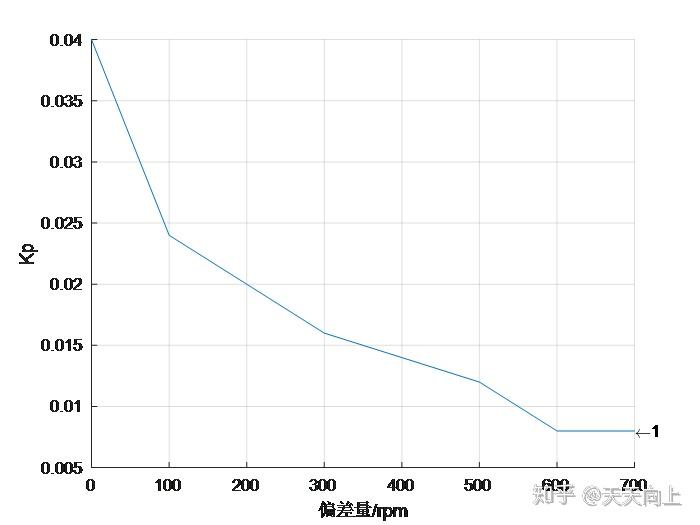
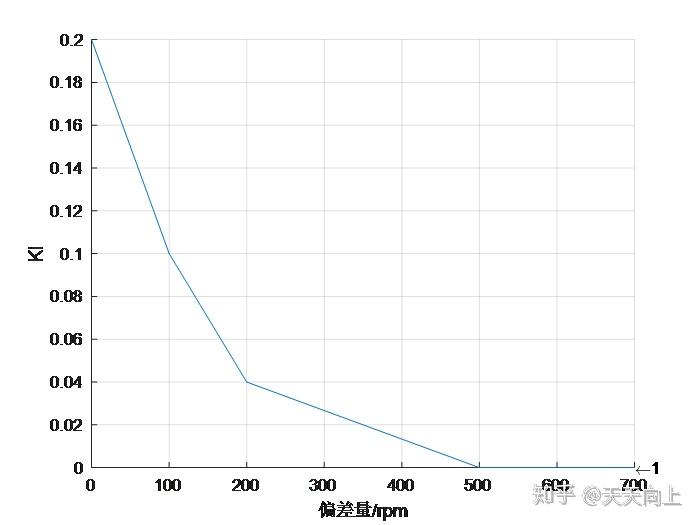
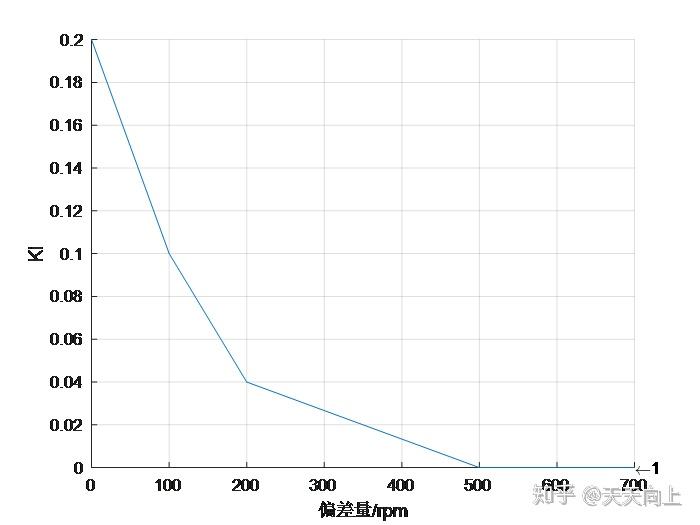
把原始PI参数变为随偏差量变化的,具体Kp、Ki曲线如下图。
进行仿真,结果如下图。与原始的PI控制器相比,响应速度差不多,但超调量减小很多,稳定性有所提高。
本方法的核心思想是,根据偏差实时调整PI参数,尽量避免超调现象发生。需要调试的参数较多,不到万不得已不建议使用。
下面,试试把三种方法一起用上,效果如下:比较完美。如果想达到稳快准的最佳效果,三种方法参数需要做适当调整,这里我们就不做进一步调试了。

实际具体工程应用上,当普通PI控制器达不到你的需求时,可以尝试加上以上的三种方法,应该可以帮你实现期望的控制效果。一般地,优先试第一种方法,不行可以第一种和第二种方法结合使用,再不行可以考虑加上第三种方法
以上,就是PI控制器调试方法分享,希望能帮到正在调参的你,2020继续加油!
欢迎关注微信公众号"新能源汽车控制",了解更多内容。
