
瑞麟医生带您读《矫形外科原则》(七)-步态

瑞麟医生带您读《矫形外科原则》(七)-步态
文|程瑞林(山东大学第二医院足踝外科中心)
来源|(微信公众号)云中瑞麟(ID: ruilinfly)
步态[2]
异常步态障碍分类
支撑相障碍 下肢支撑相的活动属于闭链运动足踝、膝、髋、骨盆、躯干、上肢、颈、头均参与步行姿势:
①支撑面异常:足内翻、足外翻、单纯踝内翻和踝内翻伴足内翻、单纯踝外翻和踝外翻伴足外翻、足趾屈曲、拇趾背伸。②肢体不稳:由于肌力障碍或关节畸形导致支撑相踝过分背屈、膝关节屈曲或过伸、膝内翻或外翻、髋关节内收或屈曲,致使肢体不稳。③躯干不稳:一般为髋、膝、踝关节异常导致的代偿性改变。
摆动相障碍 摆动相属于开链运动,各关节可以有孤立的姿势改变,但是往往引起对侧下肢姿态发生代偿性改变;近端轴(髋关节)的影响最大:
①肢体廓清障碍 垂足、膝僵硬、髋关节屈曲受限、髋关节内收受限。②肢体行进障碍 膝僵硬、髋关节屈曲受限或对侧髋关节后伸受限、髋关节内收。
常见异常步态
慌张步态/帕金森步态
是一种极为刻板的步态,表现为步行启动困难,行走时双上肢僵硬而缺乏伴随的运动,躯干前倾,髋膝关节轻度屈曲,踝关节于迈步相时无跖屈,拖步,关节活动范围减小、步伐细小。由于帕金森病患者常表现为屈曲姿势,致使重心前移。为了保持平衡,患者小步幅快速向前行走,不能随意骤停或转向,呈现出前冲或慌张步态。
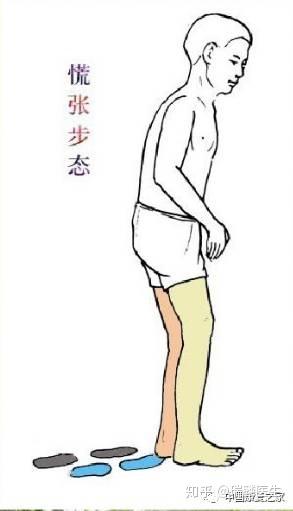
慌张步态
小脑共济失调步态
为小脑功能障碍所致。患者行走时不能走直线,呈曲线或“Z” 形前进,步宽加大、步调急促,两上肢外展以保持身体平衡。因步行摇晃不稳,状如醉汉,故又称酩酊或醉汉步态。
醉汉步态
短肢步态:
患肢缩短者,该侧着地时同侧骨盆下降导致同侧肩下降,对侧迈步腿髋膝关节过度屈曲、踝关节过度背屈。如果缩短超过100px,则缩短侧下肢以足尖着地行走,其步态统称短腿步态。
肌无力步态
1.臀大肌无力:挺挺胸凸腹步态
2.臀中肌无力:需用手稳定支持骨盆,表现为Trendelenburg征阳性
3.髋关节屈肌无力
4.股四头肌麻痹
5.胫前肌无力(垂足或跨栏步态)
6.腓肠肌无力
压股步态:股四头肌无力
股四头肌麻痹者,行走中患侧腿站立相伸膝的稳定性将受到影响,表现为足跟着地后,臀大肌为代偿股四头肌的功能而使髋关节伸展,膝关节被动伸直,造成膝反张。如同时有伸髋肌无力,则患者俯身用手按压大腿,使膝伸直。

压股步态
剪刀步态:多见于脑瘫,髋关节内收内旋、膝关节屈曲内旋、马蹄
是痉挛型脑性瘫痪的典型步态。由于髋关节内收肌痉挛,行走时迈步相下肢向前内侧迈出,双膝内侧常相互摩擦碰撞,足尖着地,呈剪刀步或交叉步,交叉严重时步行困难。

剪刀步态
痉挛性截瘫步态:脊髓损伤所致截瘫患者,如脊髓损伤部位稍高且损害程度较重但能拄双拐行走时,双下肢可因肌张力高而始终保持伸直,行走时出现剪刀步,在足底着地时伴有踝阵挛,呈痉挛性截瘫步态,使行走更加困难。如脊髓损伤部位较低且能用或不用双拐行走时,步态可呈现为臀大肌步态、垂足步态或仅有轻微异常。
臀大肌无力步态:
臀大肌无力者,而关节后伸无力,足跟着地时常用力将胸部后仰,使重力线落在髋关节后方,以维持够关节被动伸展,站立中期时膝关节绷直,形成仰胸挺腰腹的臀大肌步态。

臀大肌无力步态
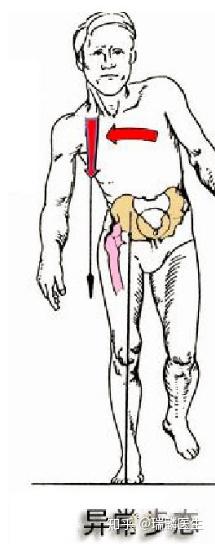
臀中肌无力步态(鸭步/摇摆步态):一侧臀中肌无力时,不能有效的维持髋关节的侧向稳定性,髋关节向患侧凸,患者肩和腰出现代偿性侧弯,使重力线通过髋关节的外侧,依靠内收肌来保持侧方稳定。典型双侧臀中肌无力的步态特征:步行时上身左右交替摇摆,形如鸭子走路,故又称为鸭步。
膝塌陷步态(瑞麟:跟行足步态?)
小腿三头肌(比目鱼肌为主)无力时,胫骨在支撑相中期和后期向前行进过分,导致踝关节不稳或膝塌陷步态,即支撑相膝关节过早屈曲,同时伴有对侧步长缩短,同侧足推进延迟,相关肌肉包括:腓肠肌-比目鱼肌和股四头肌。
膝过伸步态(?)
一侧膝关节无力可导致对侧代偿膝过伸;小腿三头肌痉挛或挛缩导致膝过伸;膝塌陷步态时采用膝过伸代偿;股四头肌肌力不足或支撑相伸膝肌痉挛;躯干前屈时重力线落在膝关节中心前方,促使膝关节后伸以保持平衡等。
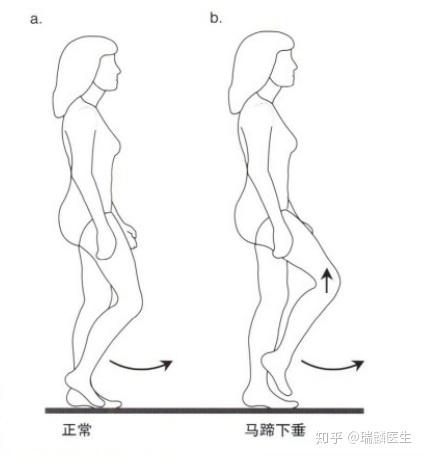
足下垂步态
足下垂指摆动相踝关节背屈不足,常与足内翻或外翻同时存在,可导致廓清障碍。代偿机制包括:摆动相增加同侧屈髖、屈膝,下肢划圈行进,躯干向对侧倾斜。常见病因是胫前肌无活动或活动时相异常。
高抬腿步态
在马蹄足中,髋关节和膝关节代偿性屈曲增加,帮助足部离开地面,形成所谓的“高抬腿步态”。

高抬腿步态
偏瘫步态/划圈步态
指一侧肢体正常,而另一侧肢体因各种疾病造成瘫痪所形成的步态。其典型特征为患侧膝关节因僵硬而于迈步相时活动范围减小,患侧足下垂内翻,为了将瘫痪侧下肢向前迈步,迈步相患侧代偿性骨盆上提、髋关节外展、外旋,使患侧下肢经外侧划一个半圆弧,而将患侧下肢回旋向前迈出,故又称为划圈步态。
表现:上肢摆动时肩、肘、手指关节屈曲、内收。下肢髋关节伸展、内收并内旋、膝关节伸展、踝关节跖屈内翻
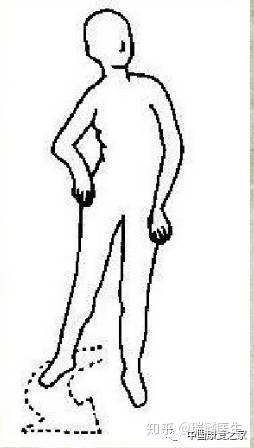
划圈步态
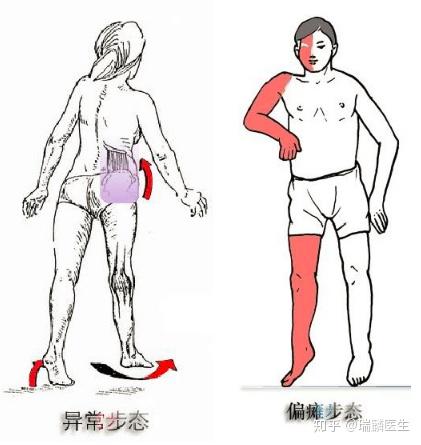

偏瘫步态
减痛步态
一侧下肢出现疼痛时,常呈现出减痛步态,其特点为患侧站立相时间缩短,以尽量减少患肢负重,步幅变短。此外,患者常一手按住疼痛部位,另一上肢伸展。疼痛部位不同,表现可有些差异。髋关节疼痛者,患肢负重时同侧肩下降,躯干稍倾斜,患侧下肢外旋、屈曲位,尽量避免足跟击地。膝关节疼痛患者膝稍屈,以足趾着地行走。
[3]急、慢性疼痛均可影响运动功能
髋关节疼痛的患者在行走时,为减轻负重期的疼痛,患者站立相时间缩短。
膝关节疼痛时,患者在整个行走周期中以轻度屈曲膝关节为特征。
踝足创伤、炎症、退行性关节炎等可引起疼痛。患者患侧步长明显缩短,正常的足跟-足尖运动模式消失。
概述
病理性步态异常可以由多种肌肉骨骼系统疾病和神经系统疾病引起,但是基本原因并不多:包括畸形、疼痛、肌力减弱,以及神经肌肉控制的改变。
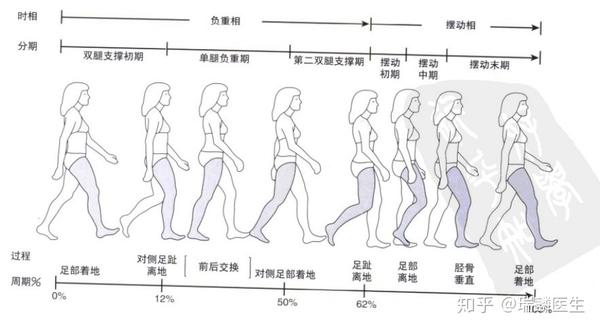
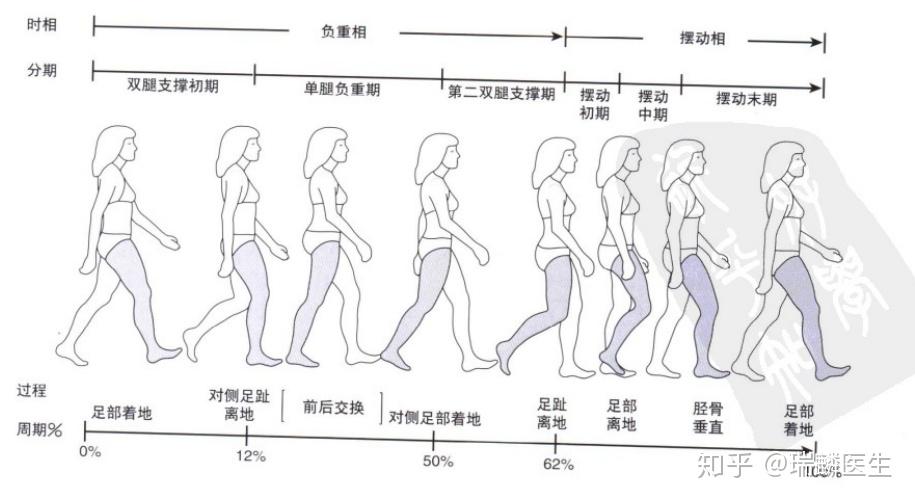
图21-1 步态周期
在正常步态中,双侧下肢的步幅相等,时间距离参数对称。步态周期定义是从足跟着地到同侧下肢的足跟再次着地。每个步态周期可以区分为摆动相(38%)和支撑负重着地相(瑞麟:简称支撑相62%,初期双腿支撑相12%→单腿支撑相38%→末期双腿支撑相12%)。在单腿支撑相期间中髋关节、膝关节和踝关节承受最大载荷。
1.与下肢畸形有关的步态考虑
下肢畸形可引起髋关节、膝关节、踝关节和足部关节的对线异常和/或关节走行异常,对步态产生的影响是牺牲关节活动度、固定关节位置和关节载荷异常。
瑞麟:步态的改变主要表现为:姿势、步幅(肢体长度、关节活动度)、频率。
牺牲关节活动度
【瑞麟】步幅的影响因素:关节活动度、肢体长度。
对骨骼畸形的代偿是以牺牲相邻关节的活动范围为代价的。当踝关节背伸用于代偿胫骨远端前弓畸形时,对步态的影响结果是正常对侧的步幅减小,以及同侧膝关节出现反曲(HE)。
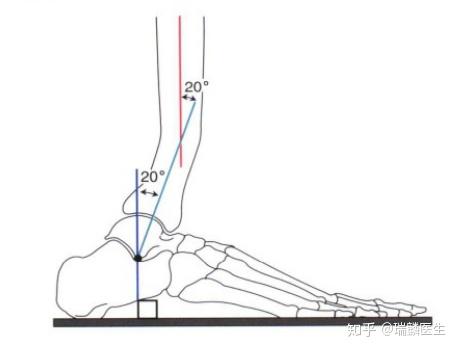

图21-2 踝关节背伸来代偿胫骨远端矢状面前弓畸形
图21-2 胫骨远端20°前弓畸形,通过耗费所有的背伸得到代偿,完全取得足部直立。胫骨远端关节面的前唇与距骨颈密切接触,限制进一步背伸,这样对可得到的代偿形成限制。
关节位置的固定
骨性畸形可以表现为固定性关节畸形。例如,胫骨近端前弓畸形可表现为膝关节FFD,由于膝关节HE受到限制,无法代偿胫骨近端的前弓,可以阻止在启动初期足跟着地,引起在启动初期足部着地,并且减小步幅。
瑞麟:膝关节反曲代偿能力有限。胫骨近端前弓畸形可表现为膝关节假性的屈曲畸形,使下肢摆相幅度降低,从而使步幅减小。
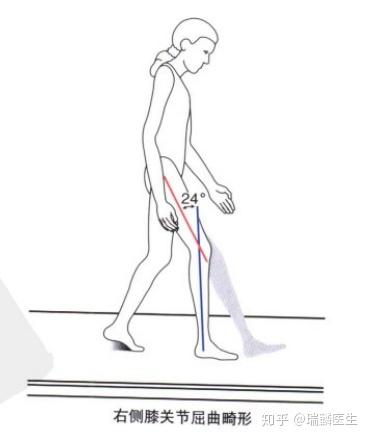
图21-6 膝关节屈曲畸形导致步幅减小
关节载荷异常
GRV(ground reaction vector,地面反作用矢量)是当体重传递到足部,地面作用于足部的净作用力。当GRV通过位于特定平面上某个关节的中心,力量平均分布于关节中心的每一侧。骨性畸形可以将GRV从关节中心偏移,使作用于关节中心一侧的压力增加。长期压力增高会引起进行性的关节软骨退变。
瑞麟:GRV是分析关节负荷及关节周围被动活动方向(关节屈伸的趋势)的好工具。
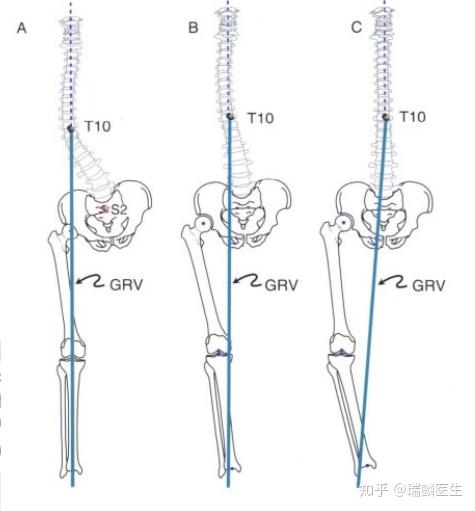

图21-7 下肢力线异常导致膝关节载荷异常
图21-7 身体上半部的重心位置直接转移到髋关节中心点的上方(A),形成载荷均等分布在内外侧胫骨平台上。在单腿支撑负重相中,正常位置(B)引起内侧胫骨平台接受平均75%的载荷,胫骨内翻畸形(C)引起内侧胫骨接受100%的载荷。
当骨性畸形以牺牲关节活动范围受到相邻关节的代偿时,也可发生关节载荷异常。例如,胫骨远端后弓畸形得到踝关节跖屈的代偿,取得足部直立位,出现距骨穹顶部覆盖不全。即使后弓只有5°,只要得到跖屈代偿,就会减少30%的胫距关节接触面积。接触面积减少导致负重区域减小,而承受的载荷数量不变,因此关节软骨的单位面积上应力增加,可引起机械性软骨退变和关节病。
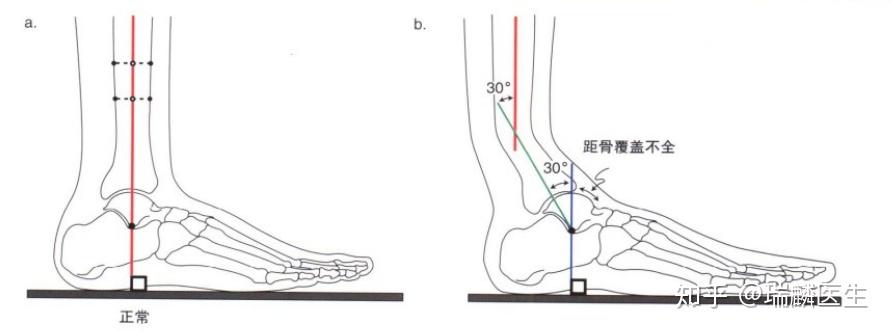

图21-8 胫骨远端矢状面后弓畸形经踝关节跖屈代偿后对踝关节负荷的影响
图21-8
a 显示正常踝关节的对线作为对比
b 胫骨远端30°后弓畸形,可通过使用30°的跖屈活动度进行代偿,取得足部直立,引起距骨顶部的覆盖不全,载荷集中于胫距关节的前方【瑞麟:为啥是前方而不是后方?】,最终引起踝关节炎。
2.代偿机制
骨性对线异常的患者能够本能地使用代偿机制,这些机制包括数个目标:试图促使步态形态正常化,提供稳定的支撑基座,促使身体在空间中移动,尽可能少地减少能量消耗,以及减少关节载荷。
【瑞麟】代偿目标的顺序:足放平,身体能站立,上半身朝前并直立。(身体)矢状面稳定→冠状面稳定。能站、能走、能舒服(省力、减少关节负荷不均)地走。分析方法是GRV。
在每次使用代偿机制时,有所得,必然就会有所失。例如,固定性踝关节马蹄畸形,由膝关节HE代偿,可引起胫距关节前方撞击,导致疼痛、半月板撕裂、甚至关节退变。膝关节HE属于动力性畸形。【瑞麟:踝关节马蹄畸形代偿方式为啥不是膝关节屈曲而是过伸?代偿的目标是维持步态,把足放平,维持下肢力线。踝关节马蹄+膝关节屈曲时,在足放平的情况下,下肢力线不能维持垂直。】
使用代偿机制可引起相邻关节发生继发性动力性畸形。当分析步态时,必须区分原发性畸形和继发性代偿畸形,继发性动力性畸形,原发性畸形,或者两者混合均能引起症状。
3.额状面对线异常
【瑞麟】额状面畸形的代偿方式有两种:相邻关节的代偿和下肢的旋转代偿。
胫骨远端内翻或外翻
畸形的严重程度和距下关节的活动范围决定步态异常状态,当畸形的程度超过所具有的距下关节活动范围,就会形成步态异常。在行走中,距下关节试图将足跟保持中立位,胫骨远端内翻的患者将外翻其后足,这样对足部周围的肌肉组织提出更高的要求。
例如,对于胫骨远端外翻畸形的患者,由于要保持后足的内翻,经常主诉胫后肌疲劳和疼痛。
内翻的患者,即使只有轻度畸形,也主诉使用足部的外侧缘行走;而外翻畸形的患者,只有在严重畸形时,才主诉采用足跟的内侧缘行走,其原因是距下关节的内翻活动范围(30°)大于外翻活动范围(15°)。
假如存在距下关节强直或活动范围异常,无法代偿对线异常和关节走行异常,取决于患者存在外翻畸形还是内翻畸形,分别主诉使用足部的内侧缘或者外侧缘行走;还会通过前足的旋前或者旋后,试图代偿额状面上的对线异常【瑞麟:距下的代偿不足,前足来补,目的是把足放平】。当存在足跟部内翻或者外翻畸形,代偿不全时,通过前足的旋前或者旋后可以重新确立足部的三点支撑(足跟、外侧缘和第一跖骨头),增加支撑的基底。
【瑞麟:前足继发性的旋前旋后会对足弓产生影响】前足旋后可引起足弓变平,足部变为更加坚硬,因此失去部分吸收冲击的能力。第一跖趾关节试图通过屈拇趾来代偿。前足旋前可引起内侧纵弓加深,跖趾关节过伸和第一跖列的跖屈。前足长期过度旋前的患者逐渐形成跖筋膜、屈肌和外展拇长肌和伸拇短肌的紧张。
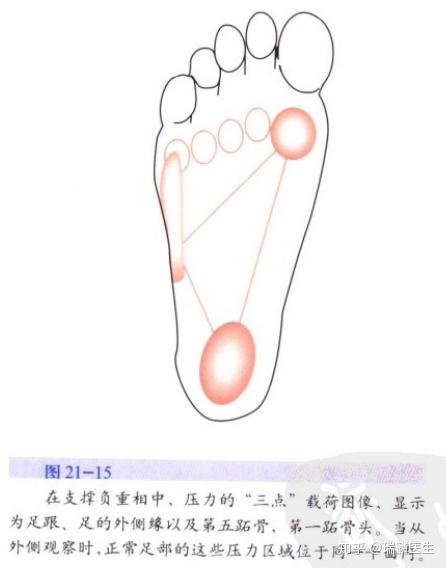

图21-15 足三点负重
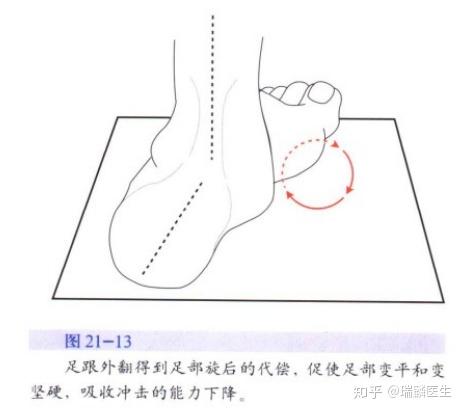

图21-13【瑞麟疑问:足外翻的方向箭头是不是画反了?】
【瑞麟疑问】足跟外翻是用来代偿胫骨远端内翻的,当代偿不足时,增加前足旋前来代偿。应该如图18-6的代偿模式才对的啊。
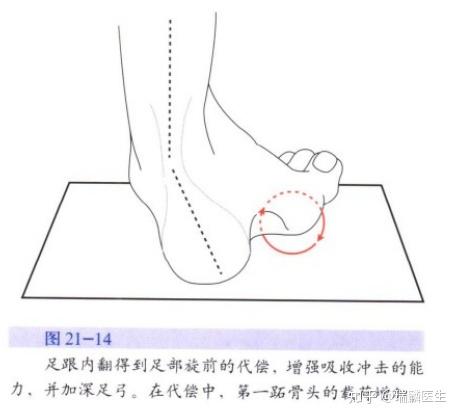

图21-14
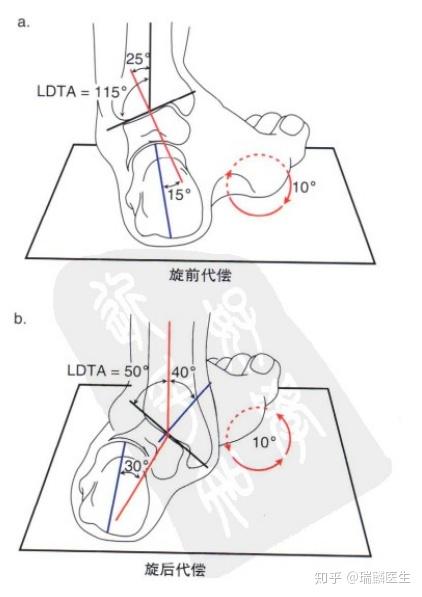
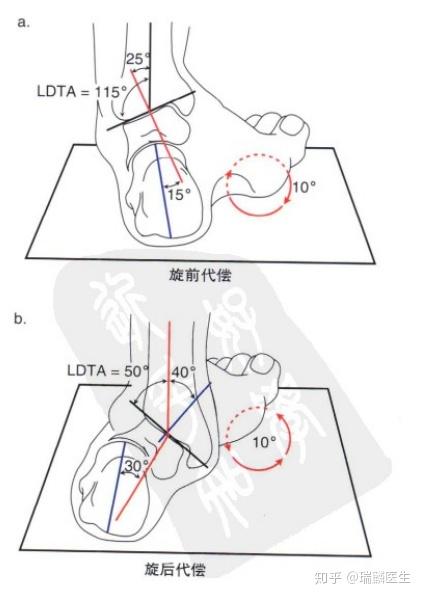
图18-6 足跟外翻+前足旋前代偿胫骨远端内翻畸形;足跟内翻+前足旋后代偿胫骨远端外翻畸形
【瑞麟:下肢如何通过旋转来代偿冠状面残余畸形】当足部处于内翻或者外翻位时,可以旋转下肢来保持稳定性。在后足内翻,不伴有旋转的情况下,GRV通过踝关节的内侧,引起作用于踝关节的内收肌力矩,需要通过外旋肌来获得对抗平衡。外旋整个下肢将GRV移位于踝关节中心,可减小外旋肌所需要的做功;与之相似,后足外翻的患者,将下肢内旋,产生内收力臂,减小内收肌的做功。(瑞麟:这段话不易理解,重新解释如下。)
【瑞麟】下肢冠状面畸形不影响患者的站立稳定性,因此代偿的目的是减轻(膝)关节负荷不均。(使用GRV来分析)足内翻时,GRV偏离膝关节(内移),使膝关节负荷不均加重,代偿方向为促使GRV靠近膝关节,即使下肢与GRV进行绞锁,即下肢外旋。反之,足外翻→GRV外移→解锁→下肢内旋。
瑞麟分析:根据距下关节模拟器的理论来分析,足内翻与下肢外旋(足外翻与下肢内旋)为同向协同,是否存在畸形叠加的问题?

图1-4-6 A倾斜铰链模拟距下关节-摘自王正义《足踝外科学》第2版
膝关节内翻畸形
当双侧下肢分开站立,与骨盆等宽,处于“稍息位”时,每侧膝关节承受约为43%的体重,其余7%为膝关节以下腿部的重量。
在双腿站立时,下肢的机械轴和GRV为一条直线,体重在内外侧间室中均匀分布;在单腿站立时,最终的GRV位于膝关节中心的内侧。
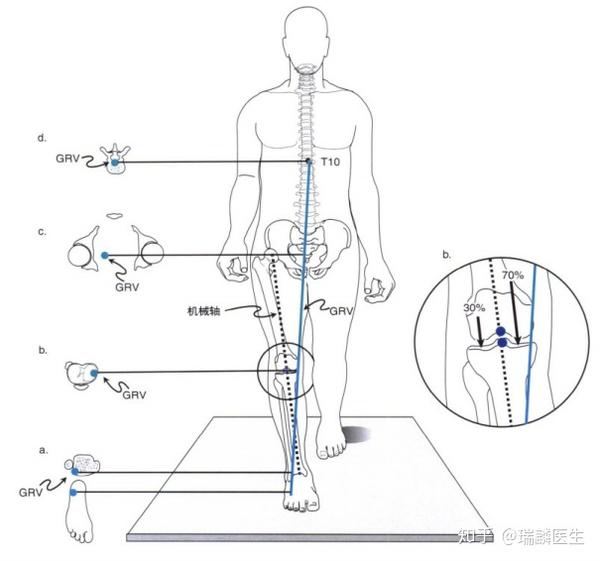
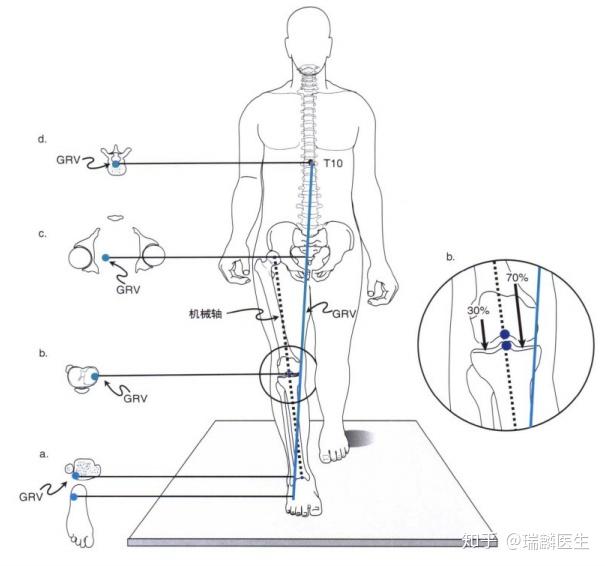
图21-16 行走时GRV位于膝关节中心的内侧
a 位于踝关节中心点的外侧;
b 位于膝关节中心点的内侧;
c 位于S2椎体的稍内侧
d 位于T10椎体。
为了在单腿站立时促使机械轴和GRV成为一条直线,中心需要转移到髋关节上方,这样需要明显的外倾,使得步态效率下降,极度消耗能量 。【瑞麟:假如臀中肌无力,行走时,髋关节不能外展,即髋关节在冠状面不稳,患者会出现摇摆步态,且需用手扶髋部以稳定关节。】
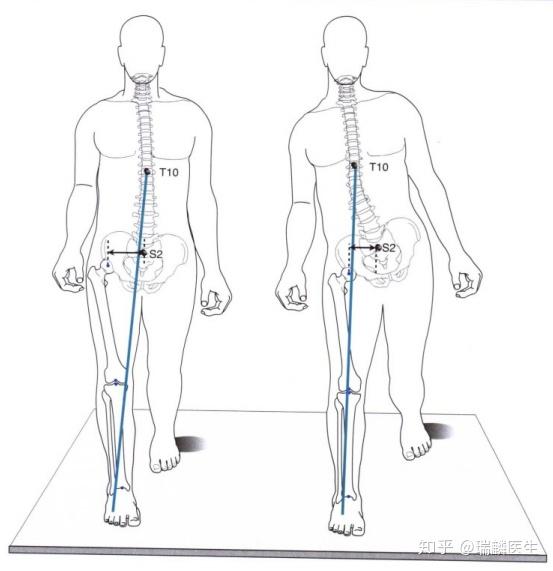
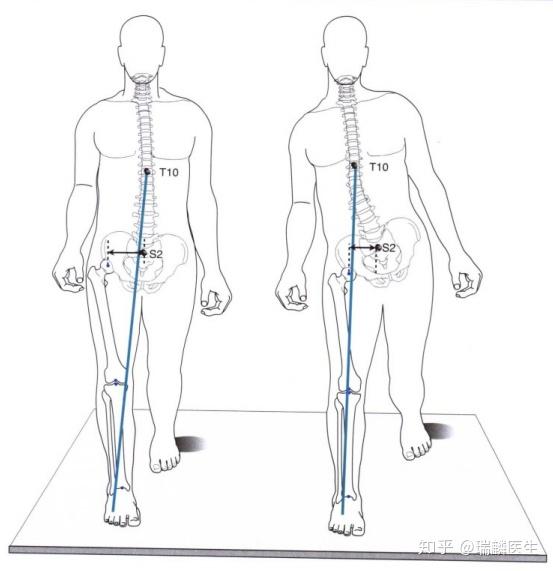
图21-17 行走时髋关节外展有利于GRV外移,从而更接近膝关节中心
当GRV位于内侧时,围绕对线正常的膝关节产生内翻力臂。而膝关节内翻畸形(或下肢其他部位的内翻)将加重这种力臂(如6°的膝内翻可使通过内侧间室的载荷增加达总数的100%)。随着膝关节内翻的不断增加,会引起内翻力臂的进行性增高,内侧点接触和载荷的增高,外侧抬起,外侧胫骨半脱位,剪力明显增加。
膝关节内翻的患者通过以下数种机制减小内翻力臂【瑞麟:使GRV外移,更加接近膝关节中心】:(a)外旋【瑞麟:外旋时下肢与GRV绞锁靠近,从而减小内翻力臂】;(b)足部旋前【瑞麟:足部的旋前与小腿的外旋呈反向,应该属于代偿关节,而非协同补偿关系,我觉得这里的足部旋前应该指前足旋前,而且其目的并非为减小内收肌力臂,而是代偿小腿外旋导致的足跟内翻,使足三点负重】;(c)身体朝畸形侧倾斜【瑞麟:髋关节外展】;(d)降低行走速度【瑞麟疑问:此处应是继发性改变,而非是代偿机制】。
【瑞麟的假设】下肢外旋使GRV内收力矩减小,而内旋使内收力短增大——可以这样简单理解,想像GRV与下肢机械轴为两根近端固定的棍子,二者在远端(膝关节以远,踝关节以近)交叉,当下肢外旋时,相当于二者更加扭紧,力矩自然减小;当下肢内旋时,相当于二者由绞锁状态向解锁的方向发展,自然力矩会变大。
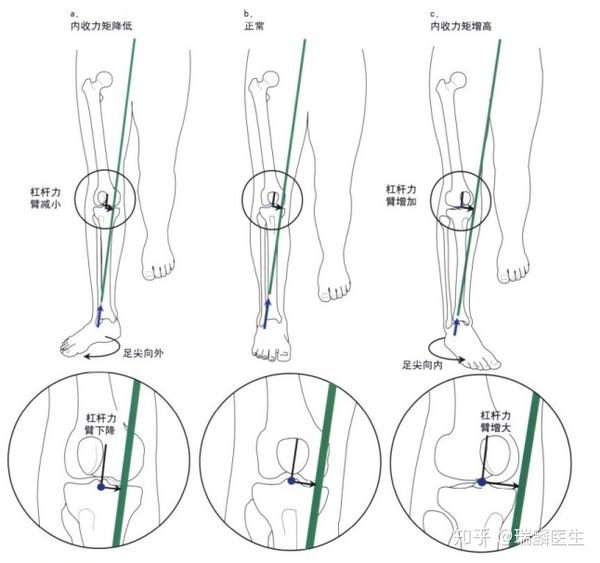
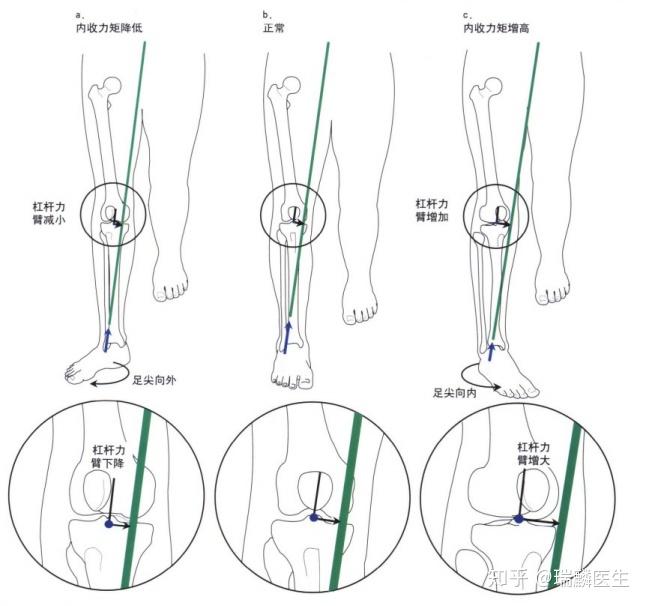
图21-20下肢外旋与内旋对GRV力臂的改变
上半身的重心位于T10,而包括下肢的整个身体的重心位于S2水平;当涉及所谓的“行走单位”或者躯干,不包括下肢,占体征的70%,其重心位于T10水平。
躯干向外侧倾斜将上部躯干的重心移动到支撑足的上方。上部躯干重心位于T10水平,使得将重心转移到受累侧具有现实可能性,这样可以减少内翻力臂和内侧间室压力载荷的数量。
【瑞麟疑问:降低速度为何是一种代偿表现?】降低行走速度也可减小膝关节中心周围的角度加速度,并且对减小内翻力臂具有直接的影响。
足部旋前是另一种机制,能够将GRV移向外侧,减少内收肌力臂,因此可降低关节内侧的载荷。在治疗内翻性膝关节病时,使用0.25英寸的外侧足跟楔形垫,将足部旋前。【瑞麟疑问:足部旋前→足跟外翻→GRV止点外移→内收肌力臂减小?】
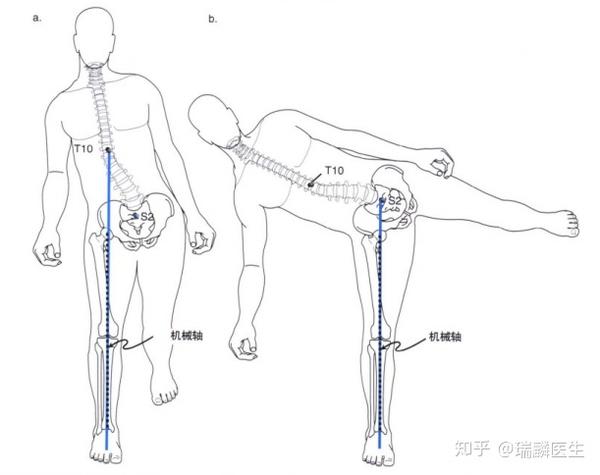

图21-23 身体倾斜使GRV外移
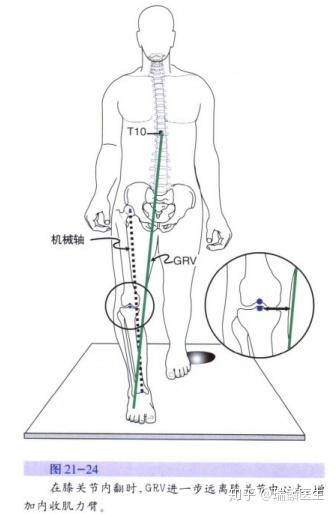
图21-24
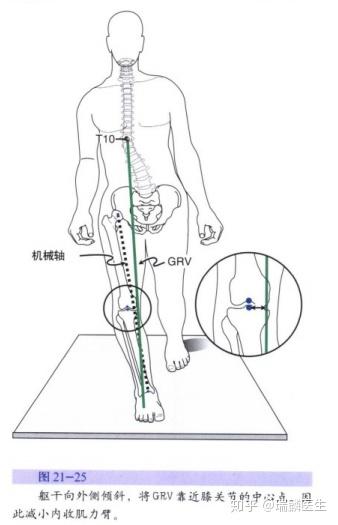
图21-25
膝关节外翻畸形
在单腿站立时,假如膝关节对线正常,外侧胫骨平台只承受30%的载荷,因此外翻对线异常,尤其是轻度畸形,并不会引起膝关节外侧间室载荷过大;不像内翻畸形,当畸形超过5°时,可引起内侧间室增加100%的载荷,重度外翻畸形才会出现以外侧间室的载荷为主。只有在畸形超过20°的情况下,压力中心才完全转移到外侧间室。胫骨外翻比胫骨内翻更加容易代偿,原因是距下关节的内翻大于外翻,下肢内旋和距下关节内翻有助于代偿胫骨外翻。
股骨近端内翻或外翻畸形
只要下肢相对于骨盆不存在内收或者外展,髋关节内翻或者外翻畸形可以得到良好的耐受。髋关节内收和外展的活动范围颇大,可以代偿大多数股骨近端的额状面畸形,髋外翻可以通过髋关节内收代偿,髋内翻可以通过髋关节外翻代偿。髋外翻引起股骨头覆盖不全,而髋内翻可以增加覆盖率,两种畸形都会引起髋臼的载荷方向改变。
只要患者的神经肌肉系统正常,不伴有半脱全的髋外翻,不会影响步态。
髋关节的固定性外展或者内收畸形,可以通过骨盆倾斜,以及对侧髋关节分别进行内收或者外展,来取得代偿。为了代偿骨盆倾斜,脊柱弯曲,保持头部的中心位于骨盆上方。
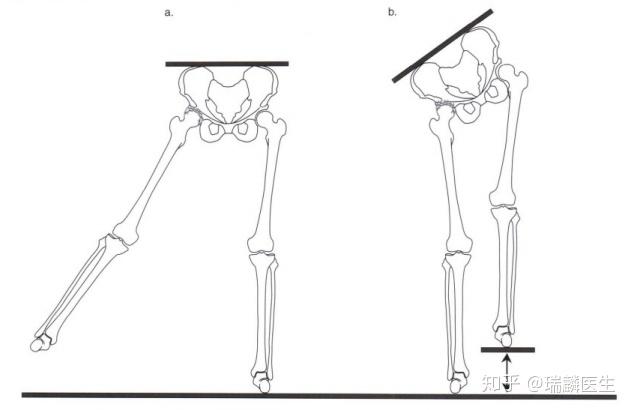

图21-31
a 髋关节固定性外展
b 固定性外展通过同侧骨盆降低得到代偿,形成同侧延长。
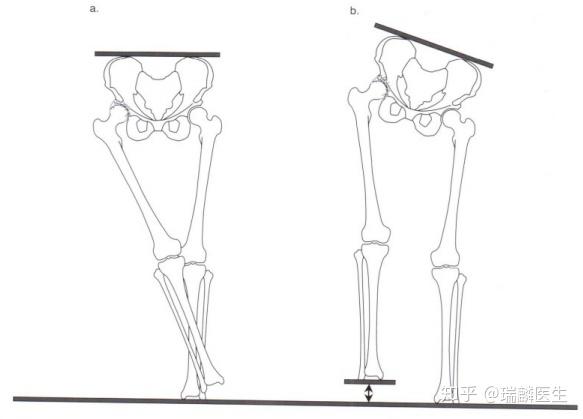

图21-32
a 髋关节固定性内收
b 固定性内收通过抬高同侧骨盆得到代偿,形成同侧短缩
4.矢状面畸形
在正常步态中足跟着地相初期,矢状面GRV的位置通过踝关节后方、膝关节和髋关节前方,在髋关节周围形成屈曲力矩,通过臀大肌和腘绳肌的收缩得到平衡。
在载荷反应期(接受体重时相),GRV通过踝关节前方、膝关节后方,并且通过髋关节,GRV处于膝关节后方的位置产生屈曲力矩,通过股四头肌的作用得到平衡【瑞麟分析:压股步态中,股四头肌无力,膝关节在GRV作用下存在屈曲趋势,通过压股,将身体上部的重点通过上肢传导到膝关节,形成Y形受力,以达到均衡】。
在支撑中期,GRV位于膝关节和踝关节前方,髋关节后方,由于GRV位于踝关节前方,产生跖屈力矩,通过腓肠肌的背屈作用得到平衡【瑞麟疑问:在踝关节前方,不应该产生踝背伸力量吗?腓肠肌只有屈膝屈踝作用,哪里来的背屈作用?】。GRV位于膝关节前方,围绕膝关节将产生伸展力矩,不需要股四头肌的作用就能保持膝关节的稳定。
在支撑末期,GRV位于膝关节前方、髋关节后方,有助于伸直髋关节,这样对于对侧取得适当的步幅长度必不可少,并且有助于屈曲膝关节,为摆相作准备。在支撑末相,伸直髋关节非常关键,髋关节伸直可以对髋关节的前方结构产生被动弹性张力,弹性张力增高有助于将足从在面上提起,而不需要腓肠肌的作用。在终末期缺乏髋关节的伸直,引起腓肠肌的需求增加,会导致疲劳。
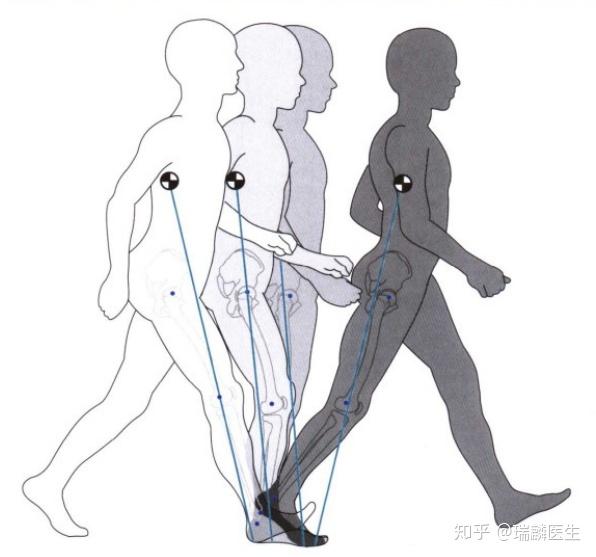

图21-35行走过程中GRV位置的变化
图21-35:在整个支撑负重相中,GRV的部位和方向不断改变,引起关节周围的角加速度,并通过联动的肌肉调节作用,和韧带以及关节囊所产生的张力得到平衡。当存在骨性畸形时,GRV发生移位,打破系统的平衡,必须增加肌肉洗和/或增加由软组织产生的张力才能恢复平衡。
骨性畸形可形成矢状面上关节位置不正常:髋关节和膝关节HE和FFD,踝关节马蹄畸形。这些不正常的关节位置限制GRV的正常移动,使其无法移动到相对于髋关节、膝关节和踝关节效率最高、能量最为节省的位置上。对这些畸形进行代偿,在站立时保持关节的稳定性,是通过超时的肌肉作用和/或通过上体的运动移动负重线取得的。
踝关节马蹄畸形
在站立时,踝关节和足部关节提供稳定性,在支撑中期,促使身体在静止的足上向前推进。因此,由马蹄畸形引起的步态异常,发生于支撑负重相中最引人注目。踝关节马蹄畸形产生过早的前足载荷和去载荷,以及缩短对侧下肢的步幅,引起行走速度下降。
马蹄畸形的代偿机制包括膝关节HE,髋关节屈曲,躯干前倾,以及在支撑中期整个下肢外旋【瑞麟医生:马蹄畸形中因膝关节HE、髋关节屈曲造成GRV在膝关节周围的扭距增加,为减小该扭距,下肢需外旋代偿】。在支撑相末期,骨盆旋向摆腿,改善该侧的迈步长度(图21-36)。在摆相中,髋关节和膝关节屈曲增加,帮助足部离开地面,形成所谓的“高抬腿步态”(图21-37)。
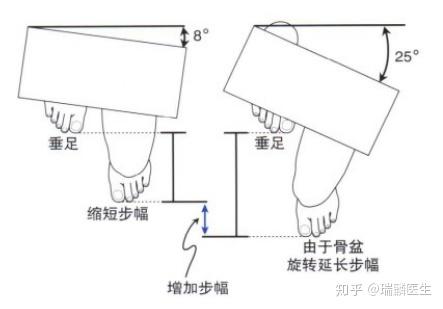

图21-36
图21-36:通过干涉支撑负重相中第二滚动作用(通过在静止的足上,背屈胫骨【瑞麟疑问:小腿背伸?】,向前移动身体),马蹄畸形减小对侧步幅。通过增加骨盆的旋转来代偿,达到增加对侧步幅的目的。
图21-37
图21-37
a 在正常行走过程中,当摆动的足部经过静止腿部时,大拇趾只离开地面1cm。
b 马蹄畸形的患者必须增加膝关节和髋关节的屈曲,在摆动相中帮助足部离开地面。
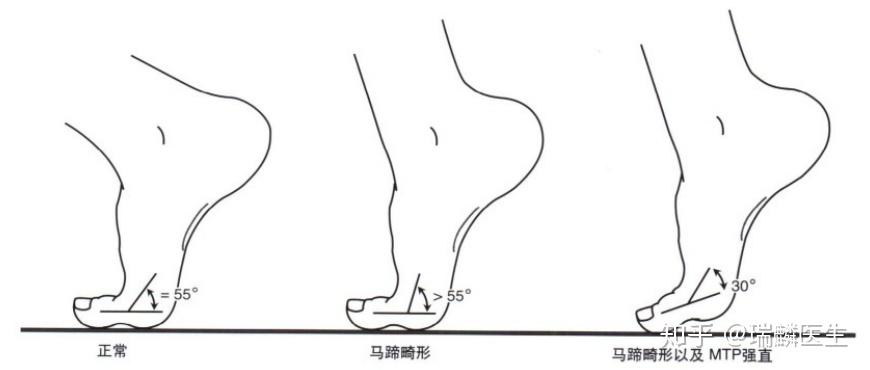

图21-41
图21-41:第一跖趾关节(MTP)正常伸展度数为55°,踝关节强直或者马蹄畸形的患者,利用该活动度促使站立的下肢在地面保持更长时间。强直的患者将主诉第一跖骨疼痛。
踝关节过度背伸或跟骨畸形
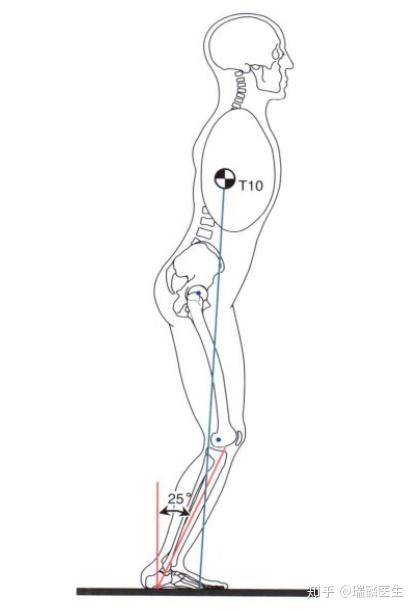
图21-44
图21-44:固定性背伸或跟骨畸形,在着地相中期,通过膝关节屈曲代偿,取得足跟-足尖步态。注意GRV位于膝关节的后方,在着地相中期,引起膝关节周围的屈曲力矩。
对于胫骨远端后弓畸形的患者,伴有踝关节过度背伸畸形或者跟骨畸形时无法行走,其原因是需要使用跖屈活动度进行代偿(正常跖屈活动范围为50°)。这样无法全面覆盖距骨顶部,并减少胫距关节的接触面积,可引起胫距关节的压力增高并集中。晚期关节退变是胫骨远端后弓畸形的常见后果,只有在当畸形超过跖屈的活动范围时,胫骨远端后弓畸形才会引起跟骨步态。
马蹄畸形比背伸挛缩更加容易耐受,马蹄畸形增加膝关节周围的伸展力矩,跟骨畸形产生屈曲力矩。膝关节周围的伸展力矩有助于稳定膝关节;屈曲力矩产生不稳定,必须由股四头肌的作用对抗平衡。在着地相中,5°以上(某些病例为10°)的马蹄畸形提供膝关节的稳定,在治疗由股四头肌减弱(例如:脊髓灰质炎后遗症)引起的矢状面膝关节不稳定时,必须牢记这一点。在这些患者中治疗马蹄畸形可能引起膝关节不稳定。跟骨步态引起膝关节周围的屈曲力矩,导致对股四头肌的需求增加,增加行走的能量 耗费。
踝关节融合畸形
踝关节融合的最佳位置是足部处于中立位到轻度背伸位,足跟处于中立位到轻度外翻位,以及10°外旋位。融合于马蹄将引起距下关节和中足关节发生退行性改变,引起跖痛和步态不良。当踝关节融合于合理的位置上时,患者平地行走功能良好,但是在上下坡和上下楼时出现功能问题,后者的需求大于平地行走,而且代偿机制不充分。
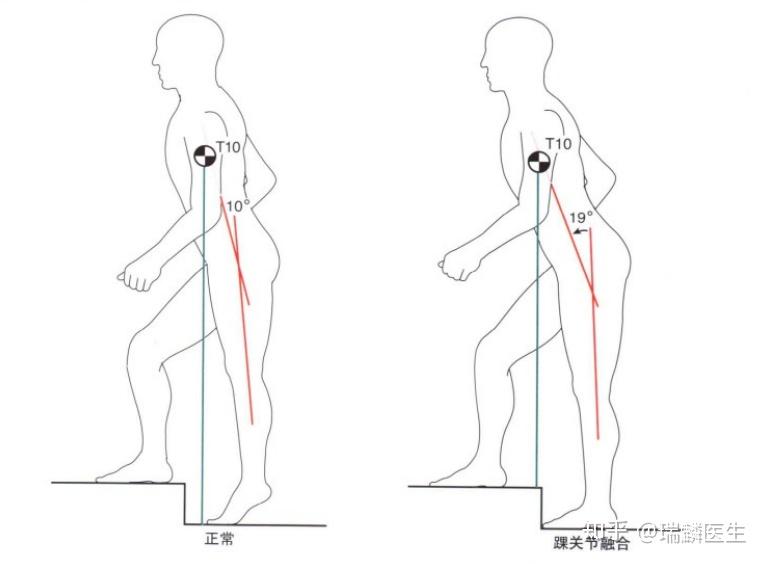

图21-45
图21-45:后侧下肢的踝关节已经融合,无法跖屈,而跖屈在上楼时必不可少。缺乏跖屈必须通过躯干向前方过度倾斜得到代偿,将重心定位于支撑腿的上方。
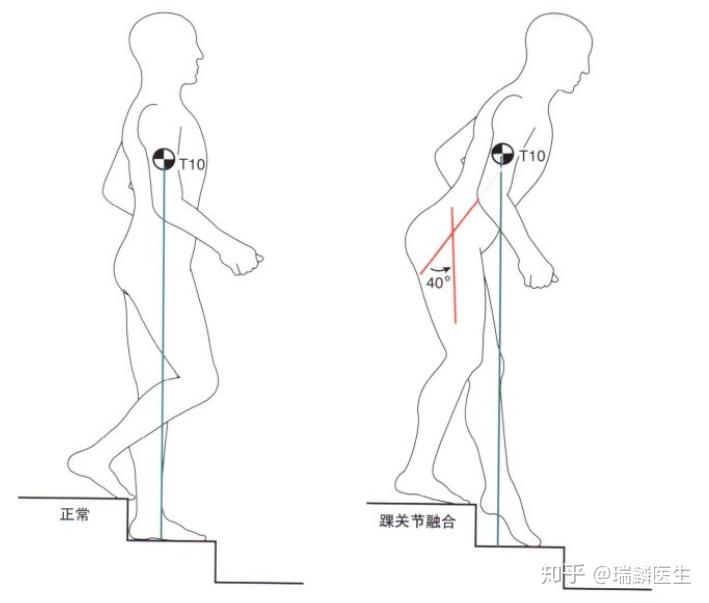

图21-46
图21-46:后侧下肢的踝关节已经融合,下楼时的情况。缺乏踝关节背伸,通过正常对侧的前足处于马蹄位接受体重,同时躯干向前方倾斜,得到代偿。
对于踝关节融合的患者,足部的活动性是身体向前推进的关键,这些关节的应力明显增高,某些患者主诉中足部位疼痛。神经性足病的患者行踝关节融合后,由于存在大量应力,可发展成为中足完全分解退变。对于某些踝关节融合患者,圆弧状鞋底是减小作用于中足应力的有效方法,还可增加对侧下肢的步幅。

图21-47
图21-47:矫正性摇椅状鞋底,足跟和前足处成斜坡状。该型摇椅鞋底在5°以上的马蹄畸形以及踝关节融合的患者中发挥最大作用。
膝关节固定性屈曲畸形(FFD)
膝关节无法完全伸直,可源于股骨远端和胫骨近端的前弓畸形、关节囊挛缩或腘绳肌紧张。在支撑负重相中期,膝关节的伸直受限由髋关节屈曲和躯干前倾部分代偿,引起对侧的步幅变短。在双侧畸形的病例中,踝关节背伸用于保持足部处于直立位。从理论上来说,膝关节FFD超过20°时,将耗尽并超出取得足部直立位所需要的踝关节背伸。当合并有膝关节FFD引起LLD时,导致马蹄畸形以及足尖-足尖步态。双侧膝关节的FFD大于20°以及踝关节强直的患者,无法以足尖-足尖的步态行走,取而代之,愿意采用髋关节屈曲,并联合躯干前倾的方式,在支撑负重相中,可以使足部平放于地面上,但是增加臀大肌在步态中的作用力。
有关膝关节FFD考虑的关键之点是股四头肌的力量。在正常步态中,踝关节跖屈肌在膝关节周围产生伸展力矩,将GRV定位于膝关节的前方,在支撑负重 相中期提供膝关节的稳定性,而不需要股四头肌的作用。当存在膝关节屈曲畸形时,GRV总是位于膝关节的后方,对膝关节产生屈曲力矩,必须由股四头肌所产生的伸展力矩平衡。FFD伴有缺乏背伸和/或股四头肌肌力减弱,将会引起残疾,这些患者别无他法,只能将躯干重度前倾,保持GRV位于膝关节前方,寻求着地相的稳定性。其他需要考虑的重点是髌股关节疼痛,在整个支撑负重相中,膝关节保持于屈曲位,以及股四头肌持续作用,增加髌股关节的压力,可以引起前膝疼痛和髌股关节炎。
旋转对线异常
内旋或外旋畸形可发生于股骨、胫骨,二者的旋转异常可以互相叠加或者抵消。
膝关节处于90°屈曲位时,胫骨相对于股骨的内旋或外旋达到最大,但是在支撑负重相中,膝关节处于屈曲20°位(当膝关节锁扣于完全伸直位时,只能发生约3°的胫骨内旋),因此膝关节的旋转不能有效代偿胫骨、股骨的扭伤。
髋关节可以对下肢内外旋进行代偿。其正常旋转活动范围是70°90°。假如扭转畸形超过髋关节的代偿性活动范围,将会影响患者的足部前进角度。在正常步态中,平均足部前进角度为外旋6°7°。为了取得正常的步态,关键是保持正常的足部前进角度,其次是保持膝关节的轴线方向正常。在行走过程中,膝关节的轴线方向大约垂直于前进方向;在行走中,足部前进角度的重要性要高于膝关节的轴线走行方向;在跑动中,膝关节的走行方向更为重要。在站立时或长时间行走后,髋关节的旋转位置至关重要,原因是舒适和能量消耗。在内旋时髋关节囊紧张,在外旋时松弛,为了代偿股骨外旋,长期保持髋关节于内旋位,会引起不舒适的感觉。外旋髋关节代偿股骨的内旋畸形比较容易耐受。
旋转畸形的其他代偿机制是骨盆旋转,在代偿性骨盆旋转中,脊柱必须向相反的方向旋转,以保持肩部向前。
髋关节或骨盆旋转主要用于代偿股骨扭转畸形。
足部也可用于代偿胫骨扭转,胫骨外旋通过足跟跖屈代偿,并伴有前足内收和旋后;胫骨内旋通过足跟内翻代偿,并伴有前足外展和旋前,这些代偿机制试图保持足尖指向前方。各种代偿性扭转发生于儿童,股骨内旋(前倾)与胫骨外旋和后足外翻有关;股骨外旋(后倾)与胫骨内旋和后足内翻有关。
当扭转畸形与膝关节屈曲畸形并存时,假如髋关节旋转进行代偿,会产生明显的膝关节内翻或者外翻,内旋伴随膝关节屈曲畸形显示为膝关节外翻,而外旋伴随膝关节屈曲畸形显示为膝关节内翻。
有关下肢长度的考虑
在正常步态中,能量保护是通过减小重心的偏移来实现的。在正常成年人中,整个身体的正常重心纵向偏移约5cm,当存在有LLD(肢体不等长)时,假如不使用代偿机制促使步态中的LLD相等,重心的纵向偏移可以增加到10cm,可引起行走时能量消耗增加。LLD患者本能地使用代偿机制,促使双侧下肢的长度相等,主要使用3种代偿机制:(a)短侧踝关节马蹄下垂;(b)骨盆倾斜,降低短侧骨盆;(c)长侧膝关节屈曲。
使用代偿机制会形成跛行,称为“短腿步态”,以下列因素为特征:(a)短侧站立时间缩短;(b)短侧步幅减小;(c)频率(步数/分钟)加快;(d)行走速度下降。
痛性跛行(疼痛步态)的患者也表现为速度、频率和站立时间的下降,但是,不同于源自LLD的跛行,步幅缩短位于未受累的无痛侧。
LLD大于45cm的患者,尽管使用代偿机制,将出现引人注目的跛行。无法使用代偿机制的患者,LLD小于1.52cm时所产生的跛行不易察觉,对LLD的代偿能力取决于下列因素:
短侧跖屈肌的力量。短侧的跖屈肌力量变弱防止短侧在承受体重时发生马蹄姿态,并限制患者的代偿能力。
短侧跖屈活动范围受限。不允许踝关节采取马蹄姿态。
长侧耐受膝关节屈曲姿势的能力。在支撑负重相中,长侧下肢处于膝关节屈曲位,引起髌股关节的反作用力增加,髌股关节炎的患者将无法耐受,在重度LLD的老年患者中非常常见。随着这些患者年龄增长,长侧髌股关节将发生显著的关节炎,此时由于无法将膝关节屈曲作为代偿机制,残疾增加。
长侧股四头肌力量。当膝关节处于屈曲位时,GRV位于膝关节中心的后方,必须增加股四头肌的作用来平衡,才能在单腿站立时保持膝关节的稳定。在长侧的股四头肌肌力减弱(例如:脊髓灰质炎)时,由于害怕摔倒,无法承受膝关节屈曲位置。
骨盆倾斜。骨盆倾向于短侧时,必须同时出现短侧髋关节外展以及长侧髋关节内收。一侧或者双侧髋关节存在关节炎和强直,无法采用骨盆倾斜作为代偿。短侧髋关节内收位挛缩或者畸形,将干扰这种代偿机制。
脊柱的柔软性。对于骨盆倾向于短侧,需要适当的脊柱柔软性,才能形成代偿性脊柱侧弯。既往施行手术矫正脊柱侧弯,并伴有固定性骨盆倾斜,使骨盆倾斜无法作为代偿机制。
LLD患者使用代偿机制后,出现的净作用是步态不对称,如同分析短侧和长侧GRV的差异一样。与之相反,正常步态是对称的。通过肢体延长使LLD相等,将恢复对称性,LLD对步态的影响似乎是可逆的。
参考文献:
1.Dror Paley 著 陈坚 译《矫形外科原则》
2.赵龙震《前方高能!异常步态你知道多少?》,(微信公众号)中国康复之家,2017-8-2
3.小家丁home《步态分析完整版》PPT,百度文库,2018-4-24
4.王正义 主编《足踝外科学》第2版,人民卫生出版社,2014年
