
GIS 计算中的凸包、凹包、内凸包等问题求解
本文首发博客:https://www.yootou.com/posts/gis-convex-hull-and-more/
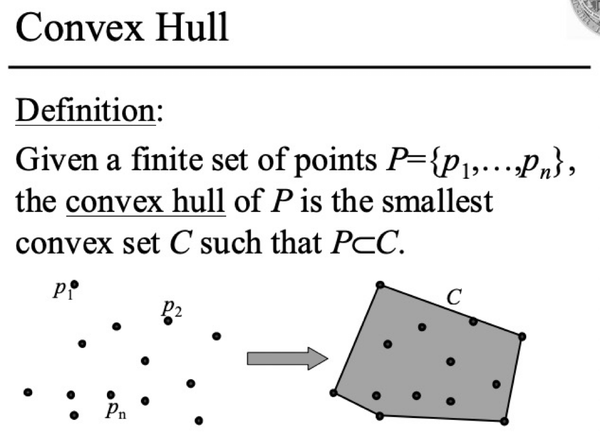
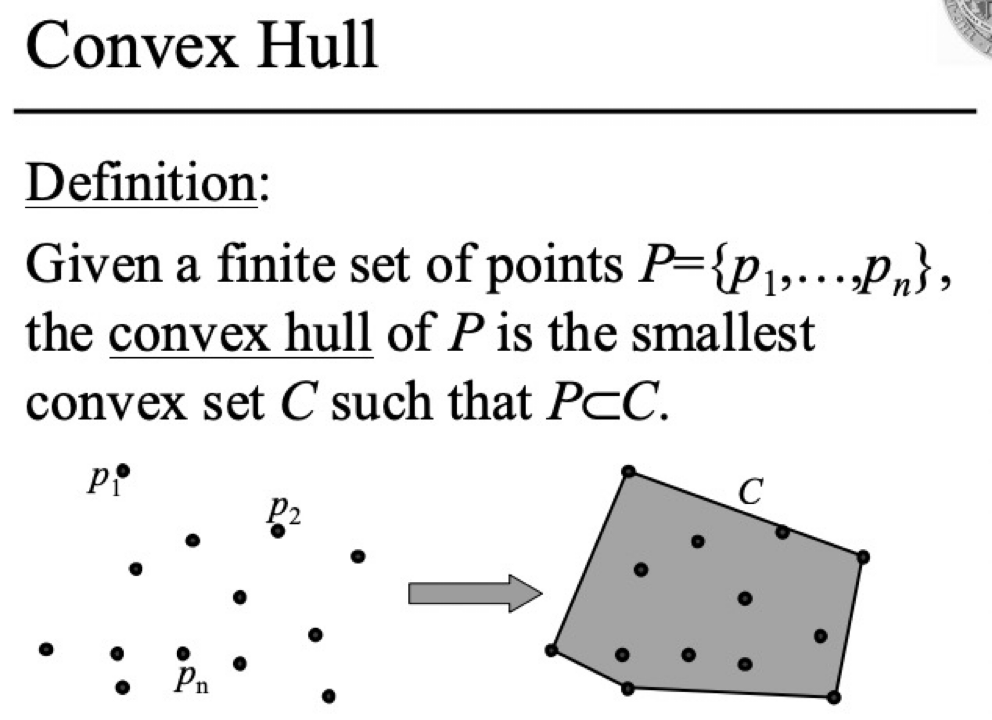
1. 最小凸包 convex hull
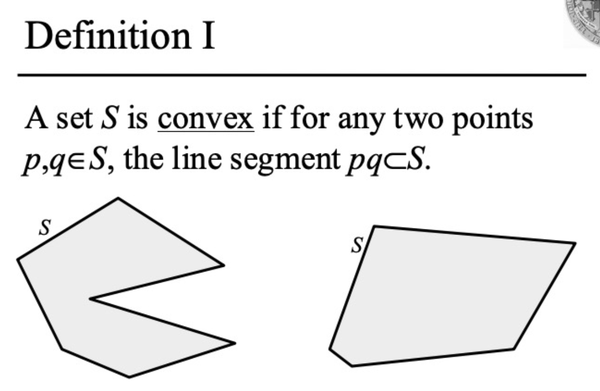
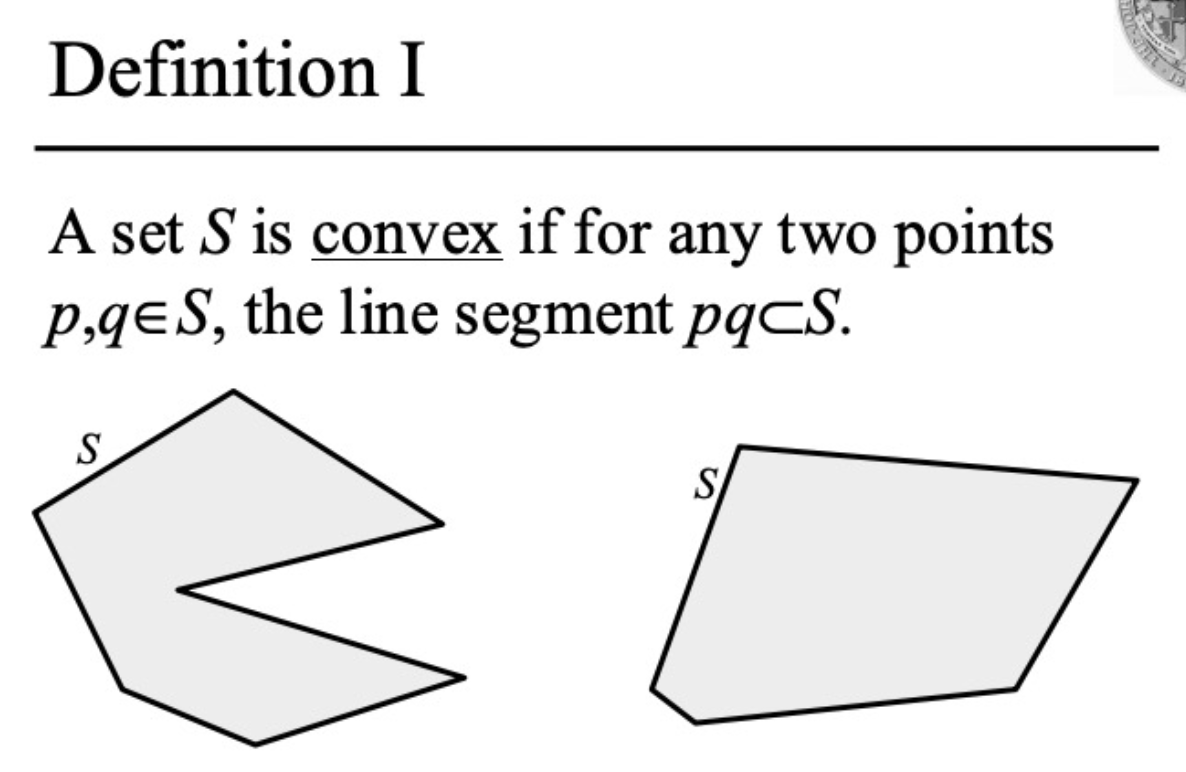
1.1 凸包的定义(convex)
- 几何定义:
- 如果一个面是 convex,那它边上的任意两点相连出来的线段都落在面的内部。
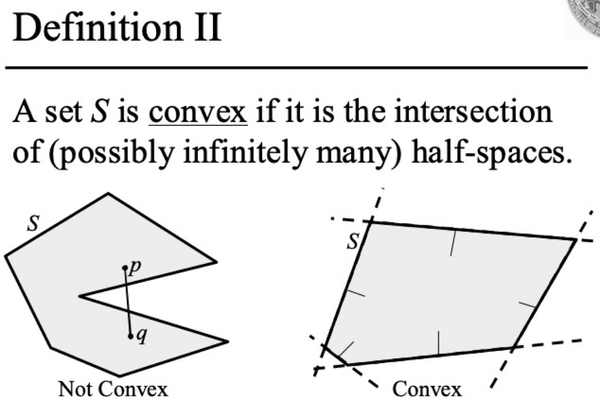
- 如果一个面是 convex,那它内部任意两点相连都将面划分为半空间 half-space
- 表象:所有两个边所成的内边角不大于180度
- 通俗的表象:将点的集合看成一根根柱子,用一根皮筋圈套住所有的柱子形成的皮筋形状就是凸包的形状。

1.2 最小凸包的定义 convex hull
针对一群点的集合,其最小面积的包含所有点的凸集合形成的面
1.3 特性或用途
- 凸包是一个确定的、包容的、平滑的、优雅的图形。
- 实际上凹包用的更多。。。
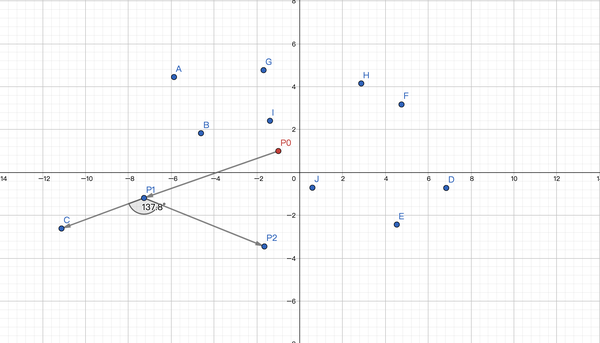
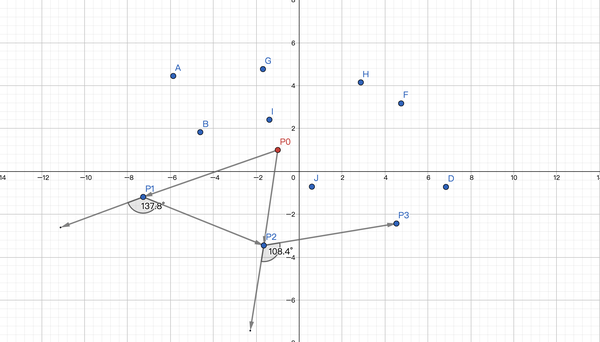
1.4 凸包计算步骤(滚球法)


- 求极心 P0
- 找出屏幕最左边的一个点,这个点一定是凸包边的一部分
- 选中 P1,寻找下一个点 P2
- 求极心到上一个选中的点的角度 P0->P1,目的是作为内外侧判断的基准
- 用已选定的点轮训所有的点,求角度 P1->P2,然后求P1->P2与P0->P1的角度差
- 选中角度差最小的点 P2
- 使用 P2 循环以上过程


演算视频:
 https://www.zhihu.com/video/1479619708551319553
https://www.zhihu.com/video/14796197085513195532. 凹包 concave hull
2.1 凹包定义
- 没有明确的定义,也没有唯一值
- 可以这样定义:Concave Hull 函数创建一个多边形,该多边形表示一组数据点所占据的区域。
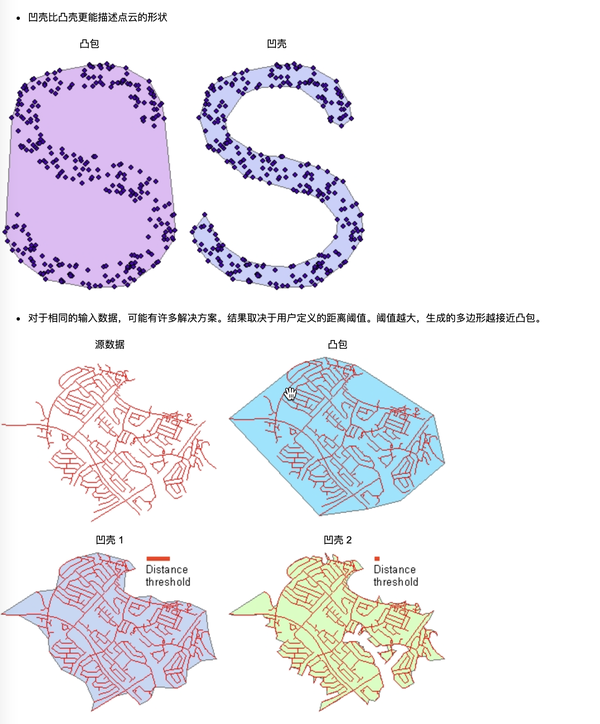




2.2 凹包用途
凹包虽然是一个没有唯一值和明确定义的图形,但是它实际上比凸包使用场景甚至更广泛。因为他代表的是尽量真实的一组点所占据的区域。
例如:现有一个较为密集的记录时间、位置的用户行驶轨迹数据,获取尽量准确的用户活动发生区域
回到这张图,也可以非常准确的表达这个需求,在这个场景下,凸包实际上对需求的表达不是很准确,而尽量逼近的凹包才是我们想要的。


又例如我之前做过的一个功能,在纵横交错的N条不规则的水平和垂直道路中,求任意四条的合围,把横着的路变成面,竖着的路变成面,最终取交集,这里怎么把很多条很复杂的线变成面,就需要用到凹包,凸包在这里完全发挥不了作用。

2.3 凹包计算步骤(滚球法)

- 求极心 P0
- 找出屏幕最左边的一个点,这个点作为凹包边的一部分 P1
- 选中 P1,进入寻找 P2 的逻辑
- 滚球法使用的球的半径,实际上代表的是一个扫描范围
- 所以,下一步以 P1 为圆心,过滤出来固定半径范围内的点:nearestPoints。
- 遍历 nearestPoints,以 P0->P1 角度为基准,逆时针旋转寻找最近的点。
- 假设当前遍历到 P2
- 计算 P1->P2 的角度,然后比对 P0->P1和 P1->P2 在逆时针上最接近的 P2
- 最终遍历结束后,逆时针角度最小的点就是要寻找的 P2
- 一直执行,直到回到起点或者执行完了一周的遍历
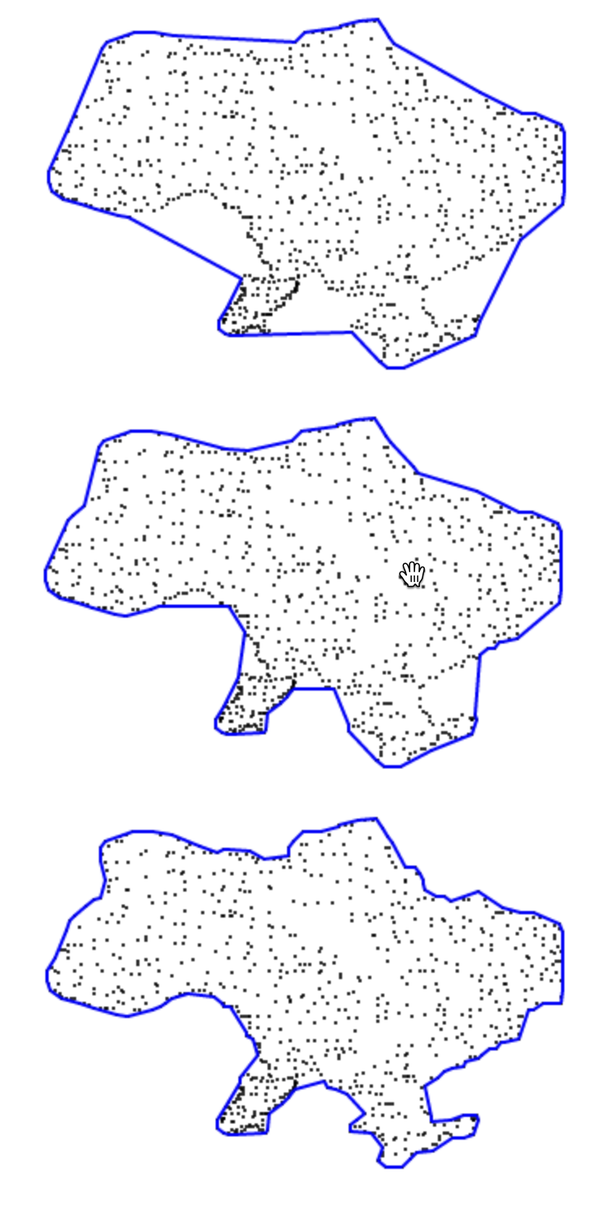
注意,凹包的特性如下:
- 凹包不是唯一的。
- 调节滚球的半径,可以获得不同的结果,什么时候用什么样的半径?不太好确定。
- 如果点一会比较集中一会比较离散,很容易断线,也就是在一个 P1 中,球滚了一圈还没有结果,这时候要么提高滚球半径,要么就会得到一个不完全的凹包。
- 提高滚球半径,会导致密集区域无法紧贴集合的边缘,二者矛盾。
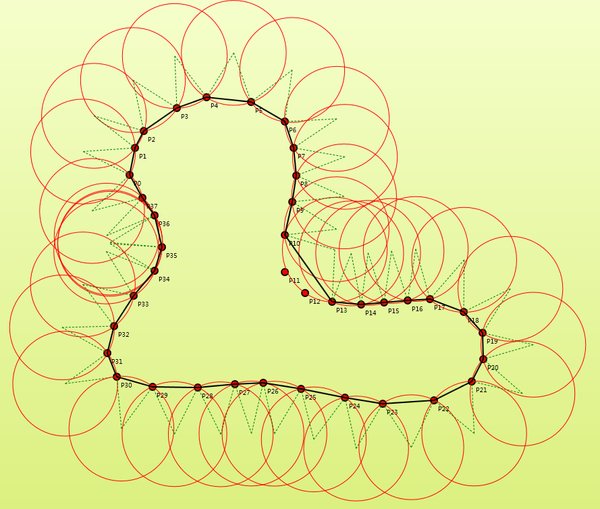
2.4. 改进凹包计算(自动伸缩滚球法)
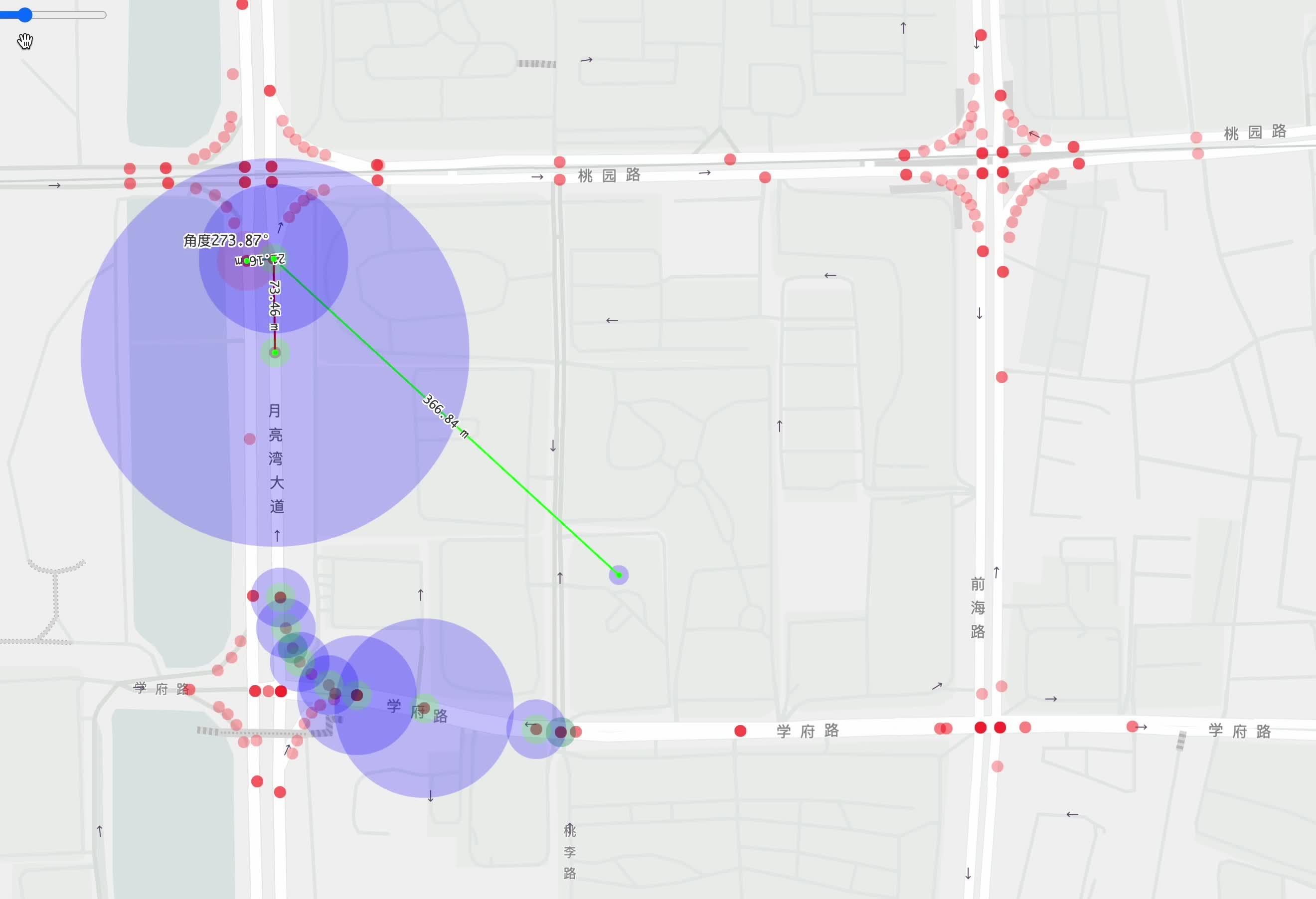
对于密集程度比较平均的集合,上述方法还算有效,但是当你拿到的是一个密集程度不均匀的集合的时候,你会发现这种普通滚球基本很难起作用。(实际上上面那个袜子图就是个很极端的均匀集合,现实情况远比这个复杂)
例如下图中的点,它们会在某些区域集中聚集,在其他位置又非常离散,如果使用上述的滚球法,你会遇到以下矛盾:
- 1.设置比较大的半径,否则你根本滚不到离散的点。
- 2.如果设置比较大的半径,你无法在密集点处滚出尽量多的点到凹包边中,因为直接就会被远处的角度更小的点卡主,跳过密集的点。

所以,我们引入自动调节滚球半径的机制,在初始的时候我们设置尽量小的半径,以使我们尽量贴近细节的边缘前进,但是在比较稀疏的位置,我们会尝试不断拉长球的半径,直到获取到下一个合理的点,并回到原始球的大小,继续前进。
改进后的流程如下:
- 求极心 P0
- 找出屏幕最左边的一个点,这个点作为凹包边的一部分 P1
- 选中 P1,进入寻找 P2 的逻辑
- 滚球法使用的球的半径 step(初始值100米),实际上代表的是一个扫描范围
- 所以,下一步以 P1 为圆心,过滤出来固定半径范围内的点:nearestPoints。
- 遍历 nearestPoints,以 P0->P1 角度为基准,逆时针旋转寻找最近的点。
- 假设当前遍历到 P2
- 计算 P1->P2 的角度,然后比对 P0->P1和 P1->P2 在逆时针上最接近的 P2
- 不同:此处需加入一个过滤逻辑,我们不需要角度过小的点,因为接下去我们新增了增加滚球半径的逻辑
- 不同:过滤逻辑,P1->P2的角度 与上一个被确定的点的角度 P1->Plast 差不能小于50,小于50的直接去掉
- 不同:如果遍历结束最终我们没有得到 P2(经过过滤),进入递归,将 step 增加,然后继续以上一个被选中的点为 P1,寻找 P2
- 不同:如果还没有,继续以上,将step继续增加,直到找到一个点
- 最终递归+遍历结束后,逆时针角度最小的点就是要寻找的 P2
- 一直执行,直到回到起点或者执行完了一周的遍历
演算视频:
 https://www.zhihu.com/video/1479620124403875840
https://www.zhihu.com/video/14796201244038758403. 内凸包
3.1 内凸包定义
- 凹包没有明确的定义,内凸包也没有明确的定义
- 内凸包没有唯一值
- 内凸包的凸包不一定是绝对的凸包
- 网上关于内凸包的资料很少,讨论也比较少
- 我是这样理解内凸包的:在点的集合的一处塞入一个气球,给气球充气,在某个时刻,气球挤出去的形状就是内凸包。。
- 内凸包有一个中心参考点(气球的起点)


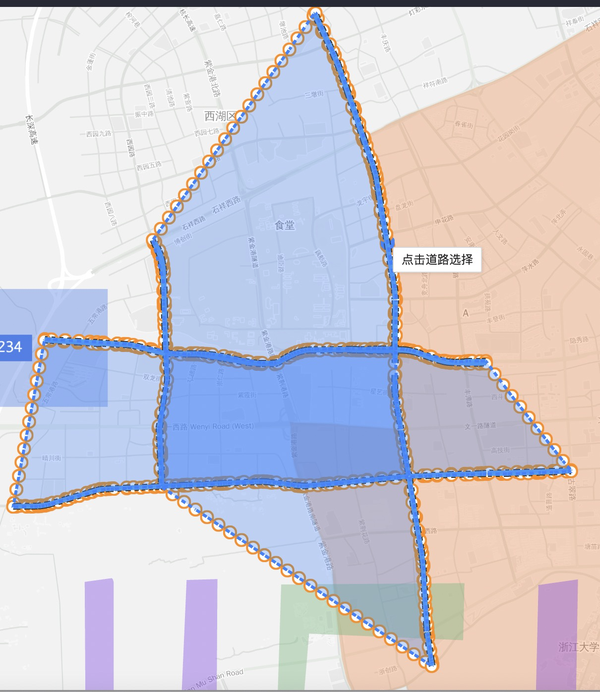
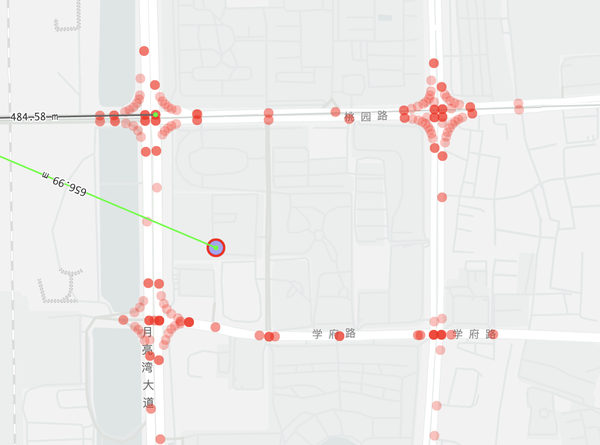
3.2 内凸包场景
如下图,实现一个当鼠标在一群点中移动的时候,能够识别出内凸包,之后可以快速用比较合理的形状填充空白区域。

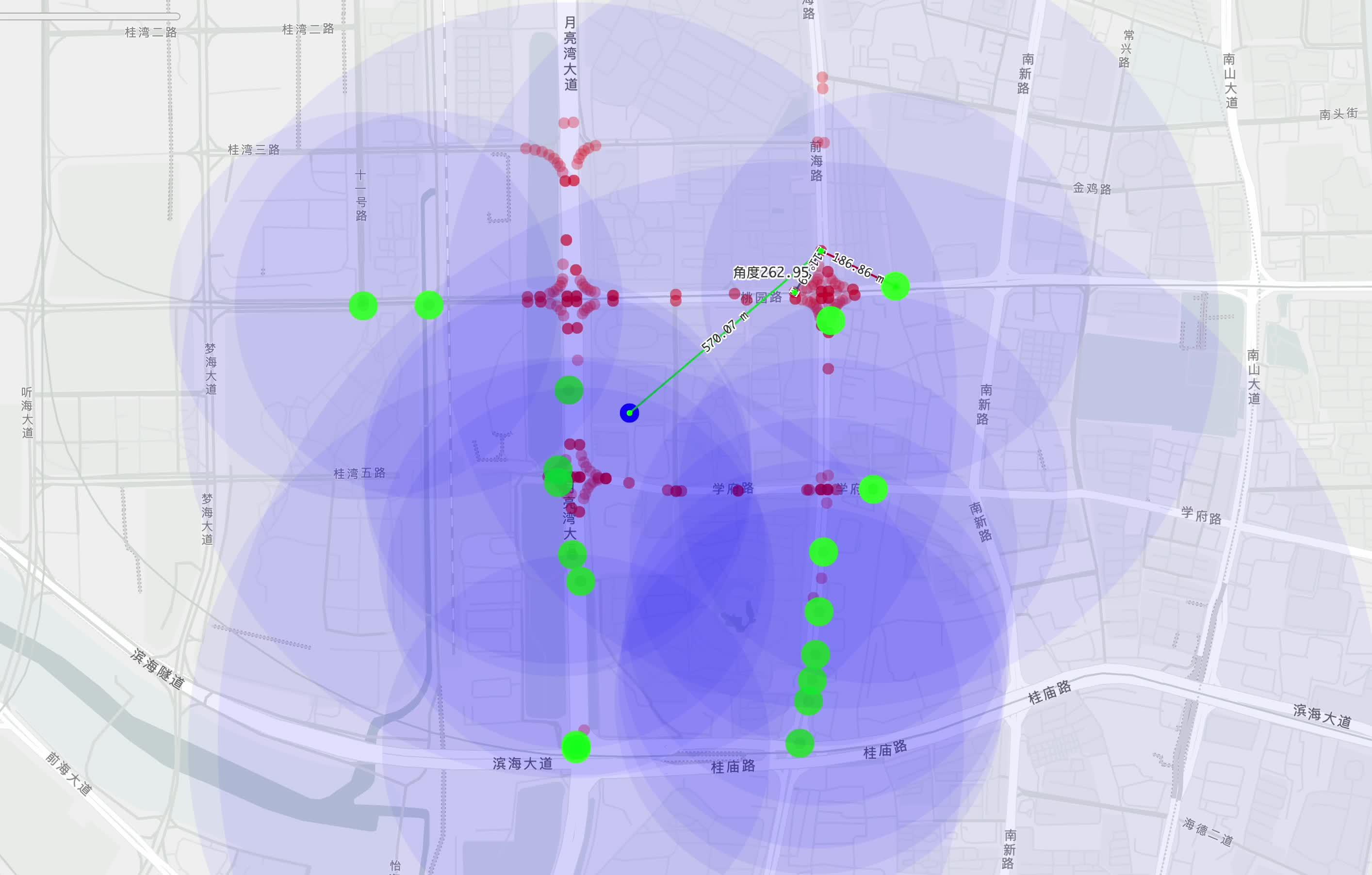
3.3 内凸包计算步骤
内凸包的计算方式和凹包非常相似,我们直接采用滚球法和自动伸缩半径的方式来计算。
不过不同的是滚球不是在外围滚,而是在内部滚,要注意滚的方向。
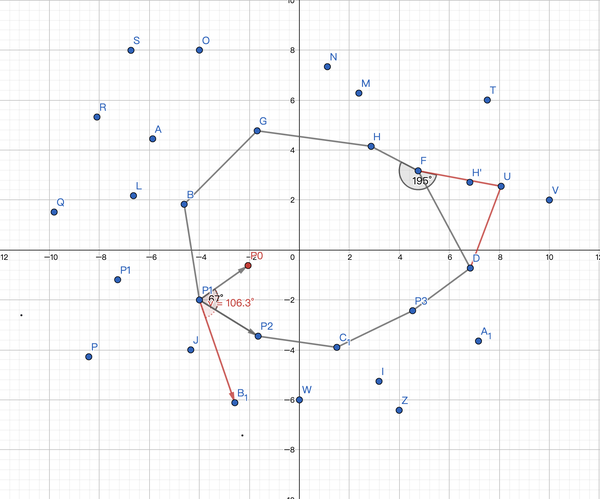
- 设鼠标位置为 P0,P0 位于内凸包内
- 以 P0 为中心,对所有点计算其距离 P0->P,记录到每个点的信息中
- 找出 P0->P 距离最短的点作为起点 P1,这个点一定是内凸包边上的点。
- 选中 P1,进入寻找 P2 的逻辑
- 滚球法使用的球的半径 step(初始值100米),实际上代表的是一个扫描范围
- 所以,下一步以 P1 为圆心,过滤出来固定半径范围 step 内的点:nearestPoints。
- 遍历 nearestPoints,以 P0->P1 角度为基准,逆时针旋转寻找最近的点。
- 假设当前遍历到 P2
- 计算 P1->P2 的角度,然后比对 P1->P0 和 P1->P2 在逆时针上最接近的 P2
- 此处需加入一个过滤逻辑,我们只需要凸包,任何凹陷都要过滤掉
- 过滤逻辑,P1->P2的角度 与上一个被确定的点的角度 P1->Plast 的角度不能大于180度,大于180度则过滤
- 如果遍历结束最终我们没有得到 P2(经过过滤),进入递归,将 step 增加,然后继续以上一个被选中的点为 P1,寻找 P2
- 如果还没有,继续以上,将 step 继续增加,直到找到一个点
- 最终递归+遍历结束后,逆时针角度最小的点就是要寻找的 P2
- 一直执行,直到回到起点或者执行完了一周的遍历
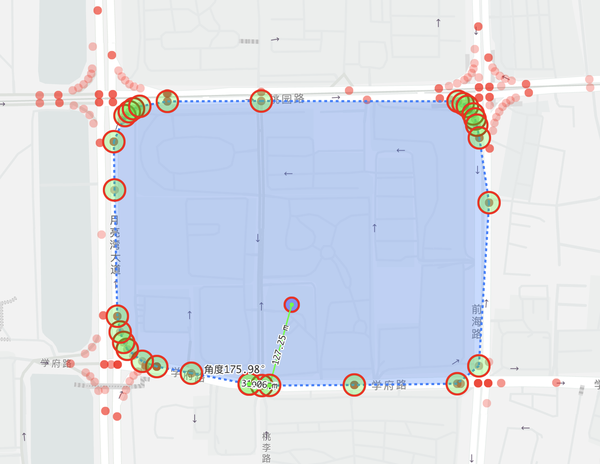
示意如下:

演算视频:
 https://www.zhihu.com/video/1479620171585691648
https://www.zhihu.com/video/1479620171585691648