谈谈矢量的叉乘与张量的矢积


(如果你认为本文与你的认知或者你所学的教材有出入,请以你的认知或所学的教材为准,对本文请不予理会)
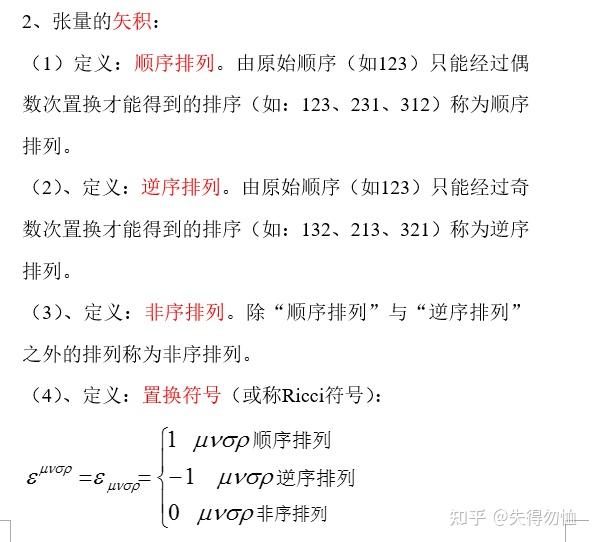
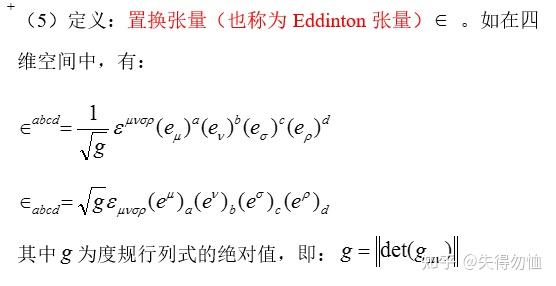
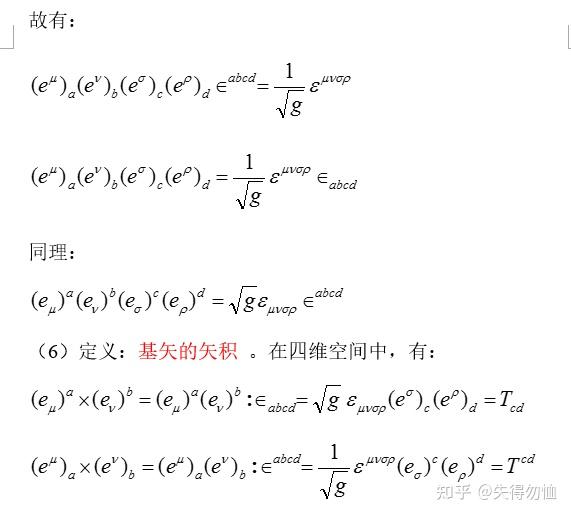
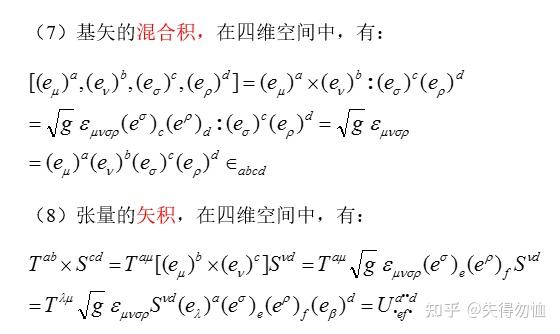
矢量的叉乘其实是张量的矢积的一个特例,关于张量的矢积,有如下的定义与运算法则(注意:由于坐标系有右手系与左手系之分,张量的矢积的定义是与坐标系的手性有关的。而在本文中,坐标一律默认为右手系,不讨论左手系也不涉及手性的变换):






上面的定义和运算法则,在二维空间及以上的空间中均成立。由于矢量是一阶张量,所以上面的运算对于矢量来说也是成立的,对于三维空间来说,两个矢量的矢积就是这两个矢量的叉乘。于是,对于三维空间中的矢量,我们有:
\left(P^i\right)\left(e_i\right){}^a\times \left(T^j\right)\left(e_j\right){}^b=\sqrt{g}P^iT^j\varepsilon _{i j k}\left(e^k\right){}_c......(1)
可见,两个逆变矢量的叉乘所得的结果是一个协变矢量。在欧氏空间的直角坐标系中,由于适配的度规是 g_{\mu \nu }=\left( \begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right) ,所以有 \sqrt{g}=1 。同时,把一个矢量用度规升降指标后,该矢量的逆变分量与协变分量相等,即有 P^i=P_i ,于是我才有通常所见的矢量叉乘的形式。对于(1)式中的基矢量,它满足如下性质:
\left(e_{\mu }\right){}^a.\left(e_{\nu }\right){}^b=g_{\mu \nu }......(2)
这才是更一般化的基矢量。在欧氏空间的直角坐标系中,显然它是正交归一的。但是在球坐标系中,由于 g_{\mu \nu }=\left( \begin{array}{ccc} 1 & 0 & 0 \\ 0 & r ^2 & 0 \\ 0 & 0 & r ^2\sin ^2\theta \end{array} \right) ,所以它并不是归一的。为了使用上的方便,人们又引入了一组归一的基底 \left(\hat{e}_r,\hat{e}_{\theta },\hat{e}_{\varphi }\right)和 \left(\hat{e}^r,\hat{e}^{\theta },\hat{e}^{\varphi }\right) ,它和上面的基底 \left(e_1,e_2,e_3\right) 与 \left(e^1,e^2,e^3\right) 之间的关系是 \left(\hat{e}_r,\hat{e}_{\theta },\hat{e}_{\varphi }\right)=\left(e_1,\frac{e_2}{r},\frac{e_3}{r \sin \theta }\right) 以及 \left(\hat{e}^r,\hat{e}^{\theta },\hat{e}^{\varphi }\right)=\left(e^1,r e^2,r \sin \theta e^3 \right) 。其实,这组所谓的归一基底,无非是把度规的影响纳入到其中罢了。
例1:质点在三维平直空间的球坐标系下相对于原点O的角动量。设质量为 m 的质点在球坐标系下的位置为 \left(x^i\right)=(r,\theta ,\varphi ) ,那么它在球坐标系下的速度是 \left(u^i\right)=\left(\frac{d x^i}{d t}\right)=\left(\frac{d r}{d t},\frac{d \theta }{d t},\frac{d \varphi }{d t}\right) 。在牛顿力学下,时间 t 是一个标量,所以 (u^i) 是一个三维矢量。而对于位置 \left(x^i\right)=(r,\theta ,\varphi ) ,它在球坐标系下相对于原点O的矢量却是 \left(R^i\right)=(r,0,0) ,所以在球坐标系质量为 m 的质点相对于原点O的角动量是:
\left(R^i\right)\times \left(mu^j\right)=m\sqrt{g}R^iu^j\varepsilon _{i j k}......(3)
具体计算如下:
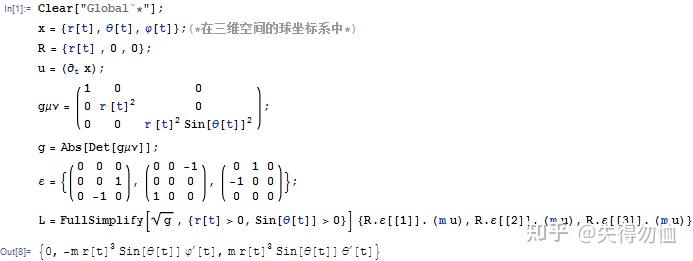

上面的结果,是在基矢量 \left(e^1,e^2,e^3\right) 下的分量。这个基矢量不是归一的,我们也可以用归一的基矢量 \left(\hat{e}^r,\hat{e}^{\theta },\hat{e}^{\varphi }\right) 去表示它,这时有角动量为:
L_i\left(e^i\right){}_a=-m r^3\dot{\varphi } \sin \theta \left(e^2\right){}_a+m r^3 \dot{\theta } \sin \theta \left(e^3\right){}_a
=-m r^3 \dot{\varphi } \sin \theta \text{ }\left( \frac{\hat{e}^{\theta }}{r}\right){}_a+m r^3 \dot{\theta } \sin \theta \text{ }\left(\frac{\hat{e}^{\varphi }}{r \sin \theta }\right){}_a
=-m r^2 \dot{\varphi } \sin \theta \text{ }\left(\hat{e}^{\theta }\right){}_a+m r^2 \dot{\theta }\left(\hat{e}^{\varphi }\right){}_a......(4)
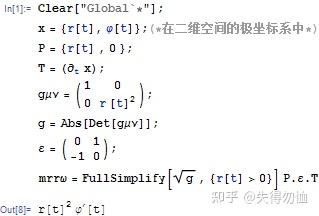
例2:二维平直空间中两个矢量的叉乘。如果我们把两个矢量的叉乘看作是两个矢量的矢积,那么在二维空间中也可以定义两个矢量的叉乘,这时有:
\left(P^i\right)\left(e_i\right){}^a\times \left(T^j\right)\left(e_j\right){}^b=\sqrt{g}P^iT^j\varepsilon _{i j }......(5)
可以看到,在二维空间中,两个矢量的叉乘所得的结果是一个标量——即0阶的张量。所以,在不同维度的空间中,两个矢量的叉乘有可能是不同阶的张量。例如在四维空间中有:
P^a\times T^b=\left(P^{\mu }\right)\left(e_{\mu }\right){}^a\times \left(T^{\nu }\right)\left(e_{\nu }\right){}^b=\sqrt{g}P^{\mu }T^{\nu }\varepsilon _{\mu \nu \alpha \beta }\left(e^{\alpha }\right){}_c\left(e^{\beta }\right){}_d=U_{c d}......(6)
即在四维空间中,两个逆变矢量的叉乘是一个二阶的协变张量。所以,在二维空间中,两个逆变矢量的叉乘是一个0阶的张量即一个标量便不足为奇。一个标量是不会随坐标系的变换而变化的,下面验证这一点。首先,我们在极坐标系下进行计算:
然后,我们在直角坐标系进行计算:
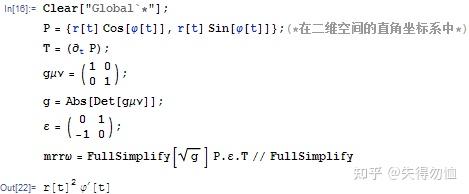

果然,两者的结果是一样的。一般地,当统一采用右手坐标系时,在 n(n\geq2) 维空间中,两个逆变矢量的叉乘(矢积)是一个 n-2 阶协变矢量。
