本研究的目的在使多軸工業機器臂可依據操作環境及任務需求產生可避障的移動路徑,並將路徑依據不同的目標進行最佳化。避障路徑的產生與最佳化是基於隨機搜尋與平行處理,先在電腦環境進行虛擬系統的演算與驗證,再於實體環境進行性能測試。藉由虛實整合的開發環境,可節省多軸工業機器臂避障與路徑規劃的運算成本並提升其控制效能。
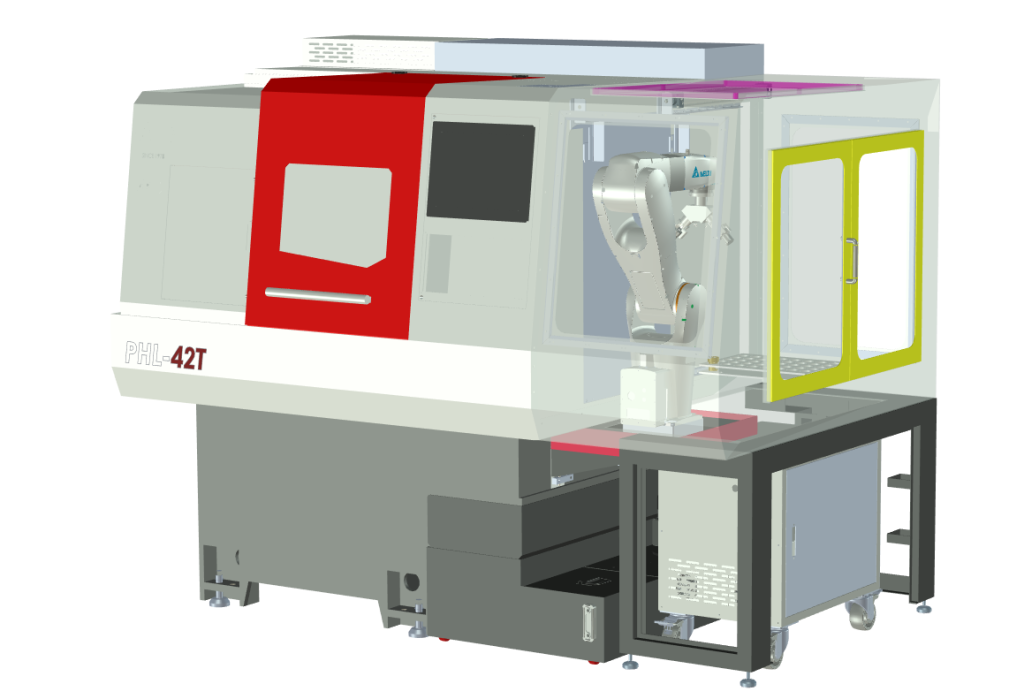
圖一、多軸工業機器臂於加工機台取放料場景
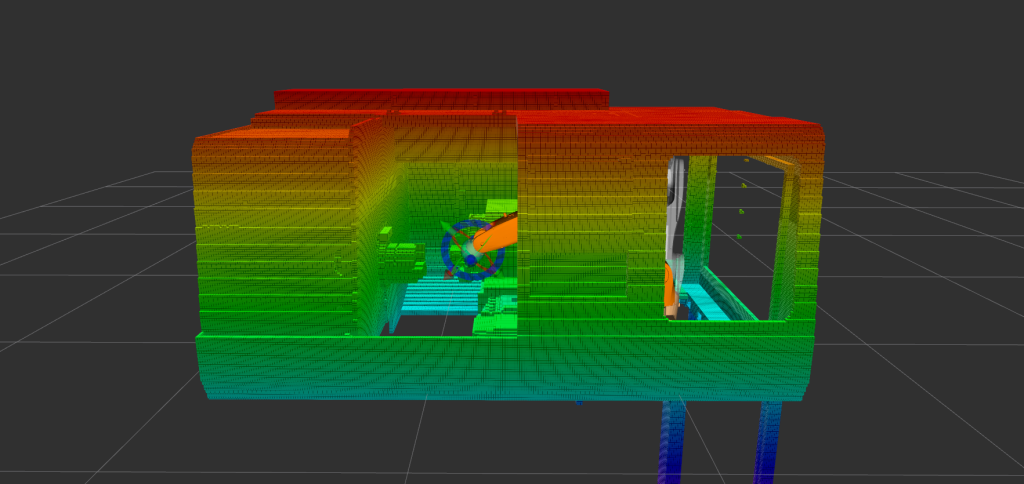
圖二、多軸工業機器臂執行工件取放之避障與路徑規劃模擬
本研究的目的在使多軸工業機器臂可依據操作環境及任務需求產生可避障的移動路徑,並將路徑依據不同的目標進行最佳化。避障路徑的產生與最佳化是基於隨機搜尋與平行處理,先在電腦環境進行虛擬系統的演算與驗證,再於實體環境進行性能測試。藉由虛實整合的開發環境,可節省多軸工業機器臂避障與路徑規劃的運算成本並提升其控制效能。
圖一、多軸工業機器臂於加工機台取放料場景
圖二、多軸工業機器臂執行工件取放之避障與路徑規劃模擬