
Abstract
Information on habitat associations from survey data, combined with spatial modelling, allow the development of more refined species distribution modelling which may identify areas of high conservation/fisheries value and consequentially improve conservation efforts. Generalised additive models were used to model the probability of occurrence of six focal species after surveys that utilised two remote underwater video sampling methods (i.e. baited and towed video). Models developed for the towed video method had consistently better predictive performance for all but one study species although only three models had a good to fair fit, and the rest were poor fits, highlighting the challenges associated with modelling habitat associations of marine species in highly homogenous, low relief environments. Models based on baited video dataset regularly included large-scale measures of structural complexity, suggesting fish attraction to a single focus point by bait. Conversely, models based on the towed video data often incorporated small-scale measures of habitat complexity and were more likely to reflect true species-habitat relationships. The cost associated with use of the towed video systems for surveying low-relief seascapes was also relatively low providing additional support for considering this method for marine spatial ecological modelling.
Similar content being viewed by others

Introduction
Finfish are widely recognised as an important component of marine systems with crucial roles in terms of ecological processes, tourism, and fisheries1,2. Anthropogenic influences such as climate change, habitat loss and increased fishing pressure alter the biodiversity, abundance and distribution of finfish, potentially compromising their ecological roles and services3,4. However, the extent of these changes is not always apparent over spatial scales relevant to management. There is a need for new or improved tools to rapidly assess and predict significant species-environment patterns across varying spatial scales in a cost-effective manner.
Remote video systems provide a way to non-destructively survey fish assemblages at depths beyond the limits of SCUBA diving and are a common method for surveying patterns of assemblage composition and population dynamics of fish5,6. Models that pair video observations data of fish with benthic habitat data that has been remotely sensed using hydroacoustic or LiDAR technologies have become a powerful tool for understanding the relationships between demersal fish species and their environments e.g.7,8,9. Furthermore, pairing these species-distribution models (SDMs) with GIS and extrapolating models into non-surveyed areas has the potential to improve understanding of distributions in unsurveyed areas or how they may change in the future10. Among the various techniques currently available for remote video sampling of fish, baited remote video (BRUVs) are probably the most established11. BRUVs have been used to monitor individual species targeted by fisheries, fish assemblage composition12,13, the effectiveness of marine protected areas14 and the impact of seismic surveys and oil spills (http://www.aims.gov.au/docs/research/monitoring/seabed/video-monitoring.html, accessed March 2016). In recent years, data obtained from BRUVs has also been widely used in SDMs6,15,16,17. However, there are problems associated with this method that limit the precision and predictive power of the models.
Baited video systems attract fishes to a bait plume or camera station, and it is common practice to deploy the individual BRUVs systems at least 250–500 m apart to keep observations independent18,19. Hence the premise for spatial analysis for data collected with BRUVs is that this method collects information over a broad spatial range, the dimensions of which are dependent on local hydrology and sensory abilities of fish6,20. This could create a discrepancy when modelling small-scale species-habitat relationships from BRUVs data and reduce the accuracy of the ecological niche predicted by the model for each species. For example, in the study by15, sand-affiliated species were predicted to be present over reef probably due to an aggregation effect induced by baiting.
Small-scale landscape heterogeneity has ecological value, supporting different and diverse communities21 or key community processes such as distribution and abundance of prey or risk of predation22. At larger scales, landscape heterogeneity that considers combinations of both patchy and contiguous habitats is required to maximise fish diversity and abundance7. Thus, while models based on broad-scale habitat classification provide a good fit and predictive accuracy, fine-scale models explain a greater proportion of observed patterns in distribution and adopting a multiscale modelling approach can provide greater insight into spatial ecology of demersal fish16. Furthermore, environmental variables that are significant at coarse spatial scales may not be relevant at finer spatial resolution16,23. These studies highlight the importance of fine-scale habitat information when modelling species distributions and the potential biases that BRUVs can introduce.
Towed video systems have advantages similar to baited video systems, as they can be deployed at great depths, are non-destructive and provide a permanent record of fish lengths11. In addition, towed video produces comparable results to diver-operated video transects24,25 and is thought to be the least biased method for sampling abundance and biomass of sparids across multiple size ranges2. Additional benefits of the towed video are that they continuously capture data over seascape transition zones26. The transition zones between different benthic substrates have previously been identified as important determinants of fish assemblage structure and diversity20, because they provide a broader array of refuges and increased foraging and spawning opportunities27. Furthermore, towed video is a useful technique for rapid surveys of low-relief seascapes, vastly reducing manpower and vessel time28,29. Known limitations of towed video are typically associated with movement of the system through the water column. Fish that exhibit avoidance behaviour to moving objects could be frightened by the camera system which could result in low estimates of abundance and species richness30, while other species may be attracted to moving objects. Towed video may also get tangled and underestimate cryptic fish especially when the system is towed over highly rugose reef or dense macroalgal canopy and consequentially bias model predictions by including false absences28,31.
In this study, we compare fish species-environment relationships derived from either BRUVs or towed video systems (hereafter BV and TV, respectively) and use these to develop species distribution models. The specific aims of this study were (1) To model environmental niche requirements for fish and compare environmental variables from best-fit models between survey methods. (2) To develop predictive maps of fish distributions based on identified environmental niches and compare these predictions across two survey methods. (3) To assess cost-effectiveness of each method to facilitate decisions about which method is most suitable for SDMs.
Results
Model selection and variable contributions
The best models for explaining probabilities of occurrence differed between methods for all six fish species (Table 1). Occasionally there were several candidate models tied for best with none or only marginal differences in Akaike weights for evidence support (e.g. candidate models for Eupetrichthys angustipes BV in Supplementary Table S1). The explanatory power of the best models did not generally differ greatly between methods for the same species. Notable exceptions were models for Coris auricularis using BV data, which had higher adjusted R2 values than models using TV data, and vice versa for Eupetrichthys angustipes (Table 1).
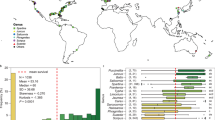
The most important variables for explaining the probability of occurrence of the study species across two survey methods was bathymetry followed by the range variable, which is indicative of structural complexity or relief (Fig. 1 and Table 1). The bathymetry variable was consistently identified as important with exception being models fitted for Notolabrus parilus when using the TV method and Upeneichthys vlamingii when using the BV method. Indeed all models for U. vlamingii presence derived from BV data were generally poor accounting for ≤2% variance in data. Range was also consistently included in models, though the spatial scale at which relief was considered important varied among species and methods. When using TV data, a finer scale relief (range 2) was often considered more important than broader spatial measures of relief (range 10). Conversely, models using BV data consistently included range 10 as an important variable (Fig. 1, Supplementary Table S1).

Relative importance of all fitted environmental variables as indicated by the sum of weighted AICc for each variable across all fitted models.
There were linear and non-linear correlations between the environmental variables and probability of occurrence of all study species identified by the GAMs of best fit (Supplementary Fig. S1). Nine out of twelve models of best fit had bathymetry as important environmental variable. The probability of occurrence of all species was typically higher in deeper water with exception to Notolabrus parilus when using the BV method. Range 10 and slope both positively correlated with probabilities of species’ occurrence, while range 5 had mixed effect on probabilities of occurrence. Range 2, profile (concavity/convexity of the slope) and easting (azimuthal slope direction) all had linear negative correlations with probabilities of occurrence of the study species (Supplementary Fig. S1).
Predictive performance
The predictive performance of models of best fit developed for the six species, was good for one model (AUC 0.8–0.9), fair for two models (AUC 0.7–0.8), and poor for nine models (0.5 < AUC < 0.7; Table 2). Models developed for the TV method had consistently better predictive performance, the exception being for Ophthalmolepis lineolatus models where the BV method had a slightly higher AUC. Similar general trends were evident for Kappa statistics, with models developed for the TV method having greater Kappa values except the O. lineolatus BV model (Table 2). Sensitivity values (correct presences) ranged from 0.41 to 0.75 and specificity ranged from 0.48 to 0.78 (correct absences). The total proportion of correct predictions (presence and absence) ranged from 0.44 for Upeneichthys vlamingii BV to 0.77 for Coris auricularis TV (Table 2).
Mapping species distributions
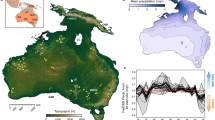
Presence absence maps provided a detailed representation of continuous predicted distributions of the six species using the two survey methods (Fig. 2 and Supplementary Fig. S1 for partial response plots as result of GAMs of best fit). The distribution of Austrolabrus maculatus, Coris auricularis and Ophthalmolepis lineolatus, all reef associated species, were predicted to be in close proximity to the reef ridge by both survey methods (Fig. 2a–d,i,j). In contrast, the ecological niche predictions for Eupetrichthys angustipes, Notolabrus parilus and Upeneichthys vlamingii differed between the two survey methods. The best fit GAM for E. angustipes from the BV data predicted this species to be spread across the bay and associated with flat areas. Whereas habitat associations predicted by the TV data for this species were mainly in deeper waters (Fig. 2e,f). The distribution of Notolabrus parilus using the BV data predicted high probability of detection along the shallow reef ridge. Whereas the distribution based on the TV data, predicted this species to more closely associate with steep terrain and maps show an even distribution across much of the bay with high probability of detection in the more exposed western part of the bay (Fig. 2g,h). Models for explaining variation in Upeneichthys vlamingii presence using BV data had weak explanatory power (Table 1) and there was no particular area of the bay that was recognised unsuitable for the Upeneichthys vlamingii based on BV data. Predictions from the TV data however mapped intermediate to deep water areas as most suitable for this species (Fig. 2k,l).

Predicted niche distributions in Geographe Bay as defined by the GAMs of best fit for individual study species across two sampling methods.
Costs
The main difference in the costs associated with the two methods relate to general logistics and pre-field preparations. Surveys using BV method require a vessel large enough to deploy 10 video systems and accommodate an additional crew member compared to the smaller boat and crew required to deploy a single towed video system. Consequently, the vessel and camera systems associated costs could be as much as 6 to 7 times higher for surveys performed with BRUVs. In addition, pre-field system calibrations took an extra five hours for the BV method (Table 3).
Discussion
A combination of TV and, rarely utilised in marine studies, LiDAR hydroacoustic surveys is a robust, non-intrusive, low cost method for examining fine-scale species-environment associations, compared to BV, at least in environments with low structural complexity. Our results indicate that the choice of data collection method is important for fitting and performance of species distribution models. All fitted models for the TV method, except for the Southern Maori wrasse Ophthalmolepis lineolatus, provided a better model fit and had higher AUC values. This is probably due to TV introducing less variation in datasets by sampling fish in their natural habitat. While demonstrating the advantages of the TV approach, our findings do not preclude the use of BV for predictive modelling in the absence of TV capacity. Spatial modellers, however, should be aware that BV may lure fish from their natural habitat, thus introducing more variation into observed species-environment relationships e.g.15.
It is clear, however, that modelling species distributions over low relief, highly homogenous environments is challenging. The explanatory power and reduced model fits presented here are relatively low compared to models developed for a structurally complex, highly heterogeneous ecosystems such as coral or temperate reefs which utilised similar environmental variables15,32. All model fits from our study would benefit from incorporation of additional biotic variables, such as extent of canopy cover of macrophytes or occurrence of sessile invertebrates. For example, previously fitted GAMs for probability of occurrence of the Brown-spotted wrasse Notolabrus parilus and O. lineolatus using macroalgal type and presence of sessile biota among other substrate associated explanatory variables, were characterised by good model fits and AUC > 0.8 for data collected with BV16. In addition33, produced a much lower AUC value for the TV method than that reported here for Blue-spotted Goatfish Upeneichthys vlamingii when using only seafloor variables and a similar number of occurrences. However, the AUC value for GAM fitted for U. vlamingii from the BV method was much higher in the study by33. One possible explanation for this dissimilarity with our findings could be differences in prevalence of modelled species between the two studies. Prevalence of species is known to affect modelling outcomes and performance of models34. The overall sample sizes in both studies were similar, however the prevalence of U. vlamingii in our study was four times higher than that reported by33.
While the predictive performance of models varied between methods, the predicted distributions of species across the bay and the extent of the ecological niches predicted by both methods were similar for four of the study species. For the remaining two species (Eupetrichthys angustipes and Upeneichthys vlamingii), the distribution patterns were more clearly defined by the TV method. The similarity in niche predictions between the two datasets could be attributed to choice of the modelled species, which are mostly narrow distributional range and/or small size species. Small sized fish tend to have smaller home ranges and are less likely to move as far as larger bodied counterparts35. Furthermore, narrowly distributed species exhibit minimal niche variation, and are more reliably modelled when extrapolating to unsurveyed areas28,36. While the TV may provide more refined distribution models than BV, the applicability of higher resolution information to spatial management will most certainly vary among species in question. For example, large mobile carnivores would be better surveyed using BV, where bait is necessary for attracting these rarely occurring species into the camera system field of view37, or where the species of interest are scared by the TV camera system moving through the water. In addition, fish species associated with structurally complex habitats or cave-dwelling species may be more effectively surveyed using methods that can effectively search caves and overhangs29,38,39. However, where there is extensive low-relief habitat, such as the seagrass meadows surveyed by this study, the TV appears to perform better than the BV in terms of examining the natural relationships between fish and their habitat. Moreover, models based on TV datasets that utilise stereo-video capabilities, allow boundaries of a surveyed area to be defined and absolute species abundance or density can be calculated, and are a significant step towards improving the biological appeal of spatial modelling in the marine environment20,40,41.
We found that bathymetry was a good predictor of occurrence patterns of endemic fish species, though the relative importance of depth differed among species and with survey methods. Fish diversity and abundance is often distributed along a depth gradient with many species only occurring within certain depth ranges42,43. This may be because depth can be a proxy for other environmental variables, such as light penetration, which influences the distribution and species composition of seagrass and algae44, which are prominent in the survey area. Canopy-forming seaweeds can drive distribution patterns of fish species that rely on these habitats for food45, shelter46,47 or nesting48.
The spatial scale at which structural complexity was measured was also an important predictor of fish occurrence and differed among species. This may relate to different sized species requiring different sized refuges27,49,50, interspecific variation in motility and home range35, or the extent of habitat specialisation51,52. However, the regular inclusion of large-scale structural complexity of habitat from the BV most probably related to fish being attracted from surrounding habitats to a single focus point by the bait. Conversely, models based on the TV data often incorporated complexity measured across a smaller scale, reflecting the movement of the system across the seascape and recording fish presence in areas they inherently occupy and use as refuge within their normal home range. Clearly, depth and structural complexity are good predictors of fish distributions, and as these metrics are also indicative of key processes that relate to resilience in other systems53 they are important variables for spatial planning of marine reserves. Moreover, maintaining connectivity between habitat patches with different levels of complexity across seascape maintains the structure of fish communities and ecosystem function54,55.
The lower survey cost associated with the use of TV compared to the BV provides additional support for considering this method for marine spatial management purposes. The level of expertise and time required for collecting and processing data from the two methods is virtually identical, the major difference being costs associated with vessel hire and the purchase of camera systems. The initial outlay of purchasing equipment is also five times greater when using BV, though repeated use of the same cameras would reduce the long term differences. The daily costs associated with needing a larger vessel and extra crew will, however, become more relevant on longer field trips. Where possible, a combination of both survey methods will provide greater insight and confidence into assemblage and species distributions for applied management purposes such as conservation spatial planning.
In conclusion, research programs must choose survey techniques and indicators applicable to their research questions29,37. While BRUVs are a well-established method for surveying fish assemblages, their usefulness for species distribution modelling should be revised due to the biases they may introduce with respect to habitat associations of fish. Other methods for surveying fine-scale species-habitat associations typically involve divers (DOVs, underwater visual census), and are limited by diving depths and times. Video from towed or autonomous underwater vehicles are, however, less constrained by depth and could become an effective method that combines the benefits of a remote video and a fine spatial scale observations of species-habitat associations. Our study provides evidence that towed video is a robust, non-intrusive, low cost method for fine-scale data collection that can be useful for spatial ecological modelling of mobile biota such as demersal fish. In combination with precise habitat data from remote sensing systems such as LiDAR, developments in towed video methods such as stereo-video capacity can map demersal species distributions as well as sessile biota and may allow rapid identification of sensitive or ecologically significant areas which are important for marine conservation.
Methods
Study area
Geographe Bay is a ~100 km wide, relatively shallow, north-facing embayment with seagrass cover that can at times exceed 60%56. The bay is located in southwestern Australia, approximately 220 km south of Perth (Supplementary Fig. S2). The majority of the seafloor is covered by unconsolidated sediments that have been deposited over older clay layers. There is also a series of discontinuous limestone ridges of varying height profiles (from <1 m to approx. 2.5 m), dominated by canopy-forming brown macroalgae, that run parallel to the coast57,58.
Fish occurrence data
Fish occurrence data was collected between the 9th and17th December 2014. This research was conducted in accordance with all relevant guidelines and regulations following permits AEC_2014_21 and SF009757 issued by the Curtin Animal Ethics Committee and WA Department of Parks and Wildlife respectively. Two methods were used for sampling fish assemblages in Geographe Bay: a point observation method using BV and a transect method using TV. The BV sampling was spatially stratified according to the size of the study area and depth: random points for sampling were allocated to adequately cover the bathymetric gradient in the bay, although major substrate types (e.g. reef ridge) were particularly targeted based on the skipper’s local knowledge of the study area. To avoid bait plume overlap and reduce the likelihood of fish moving between BV systems, systems were at least 400 m apart from each other. Each system comprised two wide-angle Sony CX12 high-definition video cameras that had been baited with approximately 800 g of crushed pilchards (Sardinops sagax), and lowered to the bottom for a 60 minute soak time. The 217 video recordings from these deployments were analysed using the software EventMeasure (SeaGIS Pty Ltd). We only included fish within seven metres of the front, 2.5 m on each side of the cameras and approximately 3 m into the water column above the BV system. Additional information on design, calibration59 and use of the BRUVs is presented in detail in the literature e.g.18,60 and references threin.
The TV camera system also consisted of two wide angle Sony CX12 high-definition video cameras mounted 0.7 m apart on a custom built cage to protect the system during collisions and provide a secure towing point. The cameras were inwardly converged at eight degrees to gain an optimized field of view with stereo-coverage from 0.5 m to the maximum visibility. The same distances for fish inclusion in the video as for the BV were applied for this method. The system was towed off the front of a 4.6 m vessel at speeds 0.5–2 knots at a height approximately 1 m above the seafloor and tilted downward to cover the immediate benthos as well as the water column in the field of view of the cameras. This configuration facilitated an ample field of view to observe demersal fish allowing safe navigation of the equipment. Using the underwater viewer and the depth sounder, the camera system was positioned immediately below the centre of the boat to within 2 m behind the vessel. The video signals were transferred to the surface via an umbilical cable where they were monitored in real-time, time stamped and synchronised with positional data that were recorded at 2 s intervals with handheld GPS located in the centre of the boat. Nine video transects were executed capturing fish assemblage composition along continuous physical and biological gradients within the study area (e.g. substrate and benthic biological habitat). This amounted to 22 hours of georeferenced underwater towed video footage, covering 83 linear km of seafloor. Subsequently, the video footage of fish species occurrence were visually analysed with the EventMeasure software (www.seagis.com.au).
In both fish occurrence datasets, all fish were identified to the lowest taxonomic level possible and provided reliable species presence records for future modelling. As prevalence of species can affect modelling outcomes and performance of models34, we chose a subset of six focal species (five of which are limited range endemic species) that were often observed in both video survey techniques and represent a diversity of demersal fish life histories, size, and mobility in the study region (Supplementary Table S2). To generate pseudo-absences for the BV fish occurrence dataset, we assigned absence to each individual deployment where the particular focal fish taxon was not observed. This method has been previously used in modelling species-environment relationships15,33. The final presence-absence BV dataset was partitioned into training (75%) and testing (25%) data for individual focal species.
To generate reliable pseudo-absences for fish observations obtained from constantly moving TV system, we applied kernel density function to the focal species occurrence dataset using ArcGIS 10.2.2. The probability density function relies on assumption that presence is a probabilistic function mainly affected by species abundance and detectability61,62. Kernel density function was applied to point data with observed presences of the focal species to generate a continuous surface of probabilities of occurrence of the focal species along a transect. The neighbourhood search radius for kernel density calculations was set to 400 m to represent similar distance that was used for the BV systems. The results of probability surface were further analysed in PresenceAbsence package63 using R statistical software version 3.264 in order to calculate the optimal threshold for translating a probability surface into presence-absence maps. We selected the optimal threshold based on the maximum values of Kappa, which is a commonly used chance-corrected measure of agreement for presence-absence ecological data63,65. The kernel density values below the optimal threshold were converted to pseudo-absences and true observations of focal species in the video recording from the TV system were kept as presences. The final pseudo-absences for modelling were randomly generated from combination of areas with kernel density below the appointed threshold and with no fish taxa observations from the TV to create a final ratio of 1:1 of true presences and pseudo-absences of a focal species along transects. The final presence-absence TV datasets were partitioned into training (75%) and testing (25%) data for individual modelled species.
Habitat data
The bathymetric data was extracted from a mosaic of LiDAR and multibeam surveys collected by Fugro Corporation Pty Ltd gridded to a cell size of 4 * 4 m. The LiDAR hydrographic survey was performed between April and May 2009 on behalf of the Department of Planning as a part of a national coastal vulnerability assessment. The LiDAR area extended seaward from the coastal waterline to the 20 m marine nautical navigation chart contour and constituted the majority of bathymetric data. For further information on LiDAR collection and processing see www.planning.wa.gov.au, accessed July 2016. In addition to the LiDAR, a small area of deeper water was surveyed during March-April 2006 using Reson 8101 multibeam in the north-west part of the study area as part of the Marine Futures biodiversity surveys (see Radford et al. 2008 and matrix-prod.its.uwa.edu.au/marinefutures/research/project; accessed July 2016 for further details). Bathymetry data and the Spatial Analyst toolkit in ArcGIS 10.2.2 was used to derive nine variables that describe the structure and complexity of the seafloor and which have previously been shown to influence the distribution of fish9,15 (Supplementary Table S3).
Species distribution modelling
To infer the effect of environmental variables (Supplementary Table S3) on the probability of occurrence of six fish taxa across the two survey methods, we applied generalised additive models (GAMs) developed for individual study species and the full subsets approach66. GAMs are the most common and well developed method for modelling fish habitats67 and the full subsets method provides an unconstrained approach for fitting ecological responses to the predictor variable66,68. All models were fitted with binomial error distributions and logit link functions in R version 3.2.064. To produce conservative models and to avoid model overfitting, the number of smooths (knots) was restricted to k = 469 and the model fits for all possible combinations of variables (total possible model fits = 1023) were compared using differences in Akaike Information Criterion corrected (∆AICc) for finite sample size70. In addition, to rank the fitted models we computed the Akaike weights71 to examine the weight of likelihood in favour of a model being the best in the given set of models. Best models were selected based on having lowest AICc value, smallest AICc difference (∆AICc < 2) and having the highest weight across all possible models70. To explore the relative importance of each variable, we summed the weighted AICc values across all possible models.
Model evaluation and predictions
The test dataset was used to evaluate the discrimination and accuracy of the best developed models for all species across two methods. We used threshold independent Receiver Operating Characteristic (ROC) and the area under the curve (AUC) as graphical means to test the sensitivity (true positive rate) and specificity (false positive rate) of a model output72,73. The area under the ROC curve is a measure of overall fit and commonly varies between 0.5 (no predictive ability) and 1(perfect fit)65. In addition, we calculated a threshold dependent Kappa statistic which is commonly used in ecological studies with presence-absence data and provides an index that considers both omission and commission errors65,74. P fair was chosen as the threshold to convert predicted probabilities of occurrence to presence/absence values as it minimises the difference between sensitivity and specificity and provides a measure of how well the model predicts both presences and absences15,16. P fair was also found to be better at selecting a threshold value when the prevalence of species was not close to 50%75, as in the case of this study. Final comparison for model predictive performance across two survey methods were done by comparing the AUC values of best model fits developed for individual species.
Semivariograms were used to assess the level of spatial autocorrelation in the residuals of all models using Automap package in R76. Low levels of spatial autocorrelation (semi-variance 0.18–0.28) were found in TV datasets, which can be attributed to the initial method of generating pseudo-absences for this dataset. The kernel density function is relying on point observation of presences in order to generate continuous surfaces of probabilities of occurrence, which in turn were used to generate pseudo-absences. Furthermore, we plotted model residuals and final model predictions against the spatial coordinates to examine systematic spatial patterns in fitted models and distribution of correct/incorrect classifications. After evaluation, the best models for individual species were predicted on 4 * 4 grid using both train and test datasets across two sampling methods. Binary presence-absence maps were then constructed using the P fair probability thresholds.
Costs
Accurate time budgets were maintained for all activities associated with each methodology and were expressed in staff time (number of hours per person devoted to each activity;38,77). We also included direct costs associated with general logistics (e.g. vessel and camera systems cost) for each survey method. Time not directly associated with the actual survey task (e.g. travel time to and from survey sites, accommodation costs) was excluded as it was similar for both methods. Time budgets were divided into three categories: Pre-Field Time (e.g. equipment calibration: 10* BRUV systems, one towed video system), In-Field Time (e.g. data collection, video download), and Post-Field Time (e.g. video analysis). To make comparison possible, all estimates of In-Field costs were standardised to 40 * 60 minutes BRUV deployments (10 BRUV systems rotated four times within an eight hour day) and 8 hour-long video recording from the towed video system.
Data Availability
The datasets analysed during the current study are available from the corresponding author on reasonable request.
References
Andrew, N. L. & Mapstone, B. D. Sampling and the description of spatial pattern in marine ecology. Oceanogr. Mar. Biol. 25, 39–90 (1987).
Morrison, M. & Carbines, G. Estimating the abundance and size structure of an estuarine population of the sparid Pagrus auratus, using a towed camera during nocturnal periods of inactivity, and comparisons with conventional sampling techniques. Fish. Res. 82, 150–161 (2006).
Sala, E. & Knowlton, N. Global marine biodiversity trends. Annu. Rev. Environ. Resour. 31, 93–122 (2006).
Butchart, S. H. M. et al. Global biodiversity: indicators of recent declines. Science. 328, 1164–1168 (2010).
Cappo, M., Harvey, E. & Shortis, M. Counting and measuring fish with baited video techniques-an overview. Aust. Soc. Fish Biol. Work. Proc. 101–114 (2006).
Terres, M. A., Lawrence, E., Hosack, G. R., Haywood, M. D. E. & Babcock, R. C. Assessing habitat use by Snapper (Chrysophrys auratus) from baited underwater video data in a coastal marine park. PLoS One 10, e0136799 (2015).
Pittman, S. J., Costa, B. M. & Battista, T. A. Using Lidar bathymetry and boosted regression trees to predict the diversity and abundance of fish and corals. J. Coast. Res. 10053, 27–38 (2009).
Moore, C. H., Harvey, E. S. & Van Niel, K. The application of predicted habitat models to investigate the spatial ecology of demersal fish assemblages. Mar. Biol. 157, 2717–2729 (2010).
Monk, J., Ierodiaconou, D., Bellgrove, A., Harvey, E. & Laurenson, L. Remotely sensed hydroacoustics and observation data for predicting fish habitat suitability. Cont. Shelf Res. 31, S17–S27 (2011).
Stamoulis, K. A. & Delevaux, J. M. S. Data requirements and tools to operationalize marine spatial planning in the United States. Ocean Coast. Manag. 116, 214–223 (2015).
Mallet, D. & Pelletier, D. Underwater video techniques for observing coastal marine biodiversity: A review of sixty years of publications (1952–2012). Fish. Res. 154, 44–62 (2014).
Saunders, B. J., Harvey, E. S. & Kendrick, G. A. Nesting behaviour of a temperate damselfish (Parma mccullochi) and its influence on algae. Mar. Freshw. Behav. Physiol. 46, 169–182 (2013).
Malcolm, H. A., Gladstone, W., Lindfield, S., Wraith, J. & Lynch, T. P. Spatial and temporal variation in reef fish assemblages of marine parks in New South Wales, Australia - baited video observations. Mar. Ecol. Ser. 350, 277–290 (2007).
Watson, D. L., Harvey, E. S., Kendrick, G. A., Nardi, K. & Anderson, M. J. Protection from fishing alters the species composition of fish assemblages in a temperate-tropical transition zone. Mar. Biol. 152, 1197–1206 (2007).
Moore, C. H., Harvey, E. S. & Van Niel, K. P. Spatial prediction of demersal fish distributions: enhancing our understanding of species-environment relationships. ICES J. Mar. Sci. 66, 2068–2075 (2009).
Chatfield, B. S., Van Niel, K. P., Kendrick, G. A. & Harvey, E. S. Combining environmental gradients to explain and predict the structure of demersal fish distributions. J. Biogeogr. 37, 593–605 (2010).
Fitzpatrick, B. M., Harvey, E. S., Heyward, A. J., Twiggs, E. J. & Colquhoun, J. Habitat specialization in tropical continental shelf demersal fish assemblages. PLoS One 7, e39634 (2012).
Cappo, M., Harvey, E., Malcolm, H. & Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquat. Prot. Areas 455–464 (2003).
Harvey, E. S., Cappo, M., Butler, J. J., Hall, N. & Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245–254 (2007).
Moore, C. H., Van Niel, K. & Harvey, E. S. The effect of landscape composition and configuration on the spatial distribution of temperate demersal fish. Ecography. 34, 425–435 (2011).
Healey, D. & Hovel, K. A. Seagrass bed patchiness: effects on epifaunal communities in San Diego Bay, USA. J. Exp. Mar. Bio. Ecol. 313, 155–174 (2004).
Laurel, B. J., Gregory, R. S. & Brown, J. A. Predator distribution and habitat patch area determine predation rates on Age-0 juvenile cod Gadus spp. Mar. Ecol. Prog. Ser. 251, 245–254 (2003).
Wilson, S. K. et al. Climatic conditions and nursery habitat quality provide indicators of reef fish recruitment strength. Limnol. Oceanogr, https://doi.org/10.1002/lno.10540 (2017).
Stobart, B. et al. A baited underwater video technique to assess shallow-water Mediterranean fish assemblages: Methodological evaluation. J. Exp. Mar. Bio. Ecol. 345, 158–174 (2007).
Warnock, B., Harvey, E. S. & Newman, S. J. Remote drifted and diver operated stereo–video systems: A comparison from tropical and temperate reef fish assemblages. J. Exp. Mar. Bio. Ecol. 478, 45–53 (2016).
Spencer, M. L., Stoner, A. W., Ryer, C. H. & Munk, J. E. A towed camera sled for estimating abundance of juvenile flatfishes and habitat characteristics: Comparison with beam trawls and divers. Estuar. Coast. Shelf Sci. 64, 497–503 (2005).
Friedlander, A. M. & Parrish, J. D. Habitat characteristics affecting fish assemblages on a Hawaiian coral reef. J. Exp. Mar. Bio. Ecol. 224, 1–30 (1998).
Monk, J. et al. Habitat suitability for marine fishes using presence-only modelling and multibeam sonar. Mar. Ecol. Prog. Ser. 420, 157–174 (2010).
Watson, D. L., Harvey, E. S., Anderson, M. J. & Kendrick, G. A. A comparison of temperate reef fish assemblages recorded by three underwater stereo-video techniques. Mar. Biol. 148, 415–425 (2005).
McIlwain, J. L. et al. Seasonal changes in a deep-water fish assemblage in response to monsoon-generated upwelling events. Fish. Oceanogr. 20, 497–516 (2011).
Hirzel, A. H., Helfer, V. & Metral, F. Assessing habitat-suitability models with a virtual species. Ecol. Modell. 145, 111–121 (2001).
Pittman, S. J. & Brown, K. A. Multi-scale approach for predicting fish species distributions across coral reef seascapes. PLoS One 6 (2011).
Monk, J., Ierodiaconou, D., Harvey, E., Rattray, A. & Versace, V. L. Are we predicting the actual or apparent distribution of temperate marine fishes? PLoS One 7, e34558 (2012).
Franklin, J. Mapping species distributions: spatial inference and prediction. (Cambridge University Press, 2010).
Nash, K. L., Welsh, J. Q., Graham, N. A. J. & Bellwood, D. R. Home-range allometry in coral reef fishes: comparison to other vertebrates, methodological issues and management implications. Oecologia 177, 73–83 (2015).
Segurado, P. & Araujo, M. An evaluation of methods for modelling species distributions. J. Biogeogr. 1555–1568 (2004).
Cappo, M., Speare, P. & De’ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302, 123–152 (2004).
Holmes, T. H. et al. A comparison of visual and stereo video based fish community assessment methods in tropical and temperate marine waters of Western Australia. Limnol. Oceanogr. Methods 11, 337–350 (2013).
Goetze, J. S. et al. Diver operated video most accurately detects the impacts of fishing within periodically harvested closures. J. Exp. Mar. Bio. Ecol. 462, 74–82 (2015).
Hobbs, N. T. & Hanley, T. A. Habitat evaluation: Do use/availability data reflect carrying capacity? J. Wildl. Manage. 54, 515 (1990).
Pearce, J. & Ferrier, S. The practical value of modelling relative abundance of species for regional conservation planning: a case study. Biol. Conserv. 98, 33–43 (2001).
Bacheler, N. M. et al. Spatial distribution of reef fish species along the southeast US Atlantic coast inferred from underwater video survey data. PLoS One 11, e0162653 (2016).
Jankowski, M. W., Graham, N. A. J. & Jones, G. P. Depth gradients in diversity, distribution and habitat specialisation in coral reef fishes: implications for the depth-refuge hypothesis. Mar. Ecol. Prog. Ser. 540, 203–215 (2015).
Kendrick, G. A. et al. Changes in seagrass coverage in Cockburn Sound, Western Australia between 1967 and 1999. Aquat. Bot. 73, 75–87 (2002).
Lim, I. E., Wilson, S. K., Holmes, T. H., Noble, M. M. & Fulton, C. J. Specialization within a shifting habitat mosaic underpins the seasonal abundance of a tropical fish. Ecosphere 7, e01212 (2016).
Wilson, S. K. et al. Seasonal changes in habitat structure underpin shifts in macroalgae-associated tropical fish communities. Mar. Biol. 161, 2597–2607 (2014).
Gillanders, B. M. & Kingsford, M. J. Influence of habitat on abundance and size structure of a large temperate reef fish, Achoerodus viridis (Pisces: Labridae). Mar. Biol. 132, 503–514 (1998).
Azevedo, J. M. N., Cepeda, H. I. R. & Rodrigues, J. B. Notes on the biology of Centrolabrus caeruleus Azevedo, 1999 (Teleostei: Labridae). Arquipel. Life Mar. Sci. 17A, 27–36 (1999).
Nash, K. L., Graham, N. A. J., Wilson, S. K. & Bellwood, D. R. Cross-scale habitat structure drives fish body size distributions on coral reefs. Ecosystems 16, 478–490 (2013).
Wilson, S. K., Graham, N. A. J. & Polunin, N. V. C. Appraisal of visual assessments of habitat complexity and benthic composition on coral reefs. Mar. Biol. 151, 1069–1076 (2007).
Munday, P. L. Habitat loss, resource specialization, and extinction on coral reefs. Glob. Chang. Biol. 10, 1642–1647 (2004).
Pratchett, M. S., Coker, D. J., Jones, G. P. & Munday, P. L. Specialization in habitat use by coral reef damselfishes and their susceptibility to habitat loss. Ecol. Evol. 2, 2168–2180 (2012).
Graham, N. A. J., Jennings, S., MacNeil, M. A., Mouillot, D. & Wilson, S. K. Predicting climate-driven regime shifts versus rebound potential in coral reefs. Nature 518, 94–97 (2015).
Olds, A. D. et al. Incorporating surrogate species and seascape connectivity to improve marine conservation outcomes. Conserv. Biol. 28, 982–991 (2014).
Nagelkerken, I., Sheaves, M., Baker, R. & Connolly, R. M. The seascape nursery: a novel spatial approach to identify and manage nurseries for coastal marine fauna. Fish Fish. 16, 362–371 (2015).
McMahon, K. et al. Status of a shallow seagrass system, Geographe Bay, south-western Australia. J. R. Soc. West. Aust. 80, 255–262 (1997).
Van Niel, K. P., Holmes, K. W. & Radford, B. Seagrass Mapping Geographe Bay 2004–2007. Report ot the Southwest Catchment Council. School of Earth and Environment The University of Western Australia (2009).
Wernberg, T., Kendrick, G. A. & Phillips, J. C. Regional differences in kelp-associated algal assemblages on temperate limestone reefs in south-western Australia. Divers. Distrib. 9, 427–441 (2003).
Harvey, E. & Shortis, M. A system for stereo-video measurement of sub-tidal organisms. Mar. Technol. Soc. J. 29, 10–22 (1995).
Langlois, T., Harvey, E. & Meeuwig, J. Strong direct and inconsistent indirect effects of fishing found using stereo-video: testing indicators from fisheries closures. Ecol. Indic. 23, 524–534 (2012).
Brotons, L., Thuiller, W., Araújo, M. B. & Hirzel, A. H. Presence-absence versus presence-only modelling methods for predicting bird habitat suitability. Ecography. 27, 437–448 (2004).
Silverman, B. W. Density estimation for statistics and data analysis. 26, (CRC press, 1986).
Freeman, E. A. & Moisen, G. PresenceAbsence: An R package for presence absence analysis. J. Stat. Softw. 23, 1–31 (2008).
R Core Team. R: A language and environment for statistical computing, R foundation for statistical computing, Vienna, Austria. (2014).
Elith, J. et al. Novel methods improve prediction of species’ distributions from occurrence data. Ecography. 29, 129–151 (2006).
Zuur, A., Ieno, E. N., Walker, N., Saveliev, A. A. & Smith, G. M. Mixed effects models and extensions in ecology with R. (Springer Science & Business Media, 2009).
Valavanis, V. D. et al. Modelling of essential fish habitat based on remote sensing, spatial analysis and GIS. Hydrobiologia 612, 5–20 (2008).
Fulton, C. J. et al. Sea temperature shapes seasonal fluctuations in seaweed biomass within the Ningaloo coral reef ecosystem. Limnol. Oceanogr. 59, 156–166 (2014).
Wood, S. N. Generalized Additive Models: an introduction with R. (Chapman& Hall/CRC, 2006).
Burnham, K. P. & Anderson, D. R. Model selection and multimodel inference: a practical information-theoretic approach. (Springer Science & Business Media, 2003).
Buckland, S. T., Burnham, K. P. & Augustin, N. H. Model selection: an integral part of inference. Biometrics 53, 603–618 (1997).
Fielding, A. H. & Bell, J. F. A review of methods for the assessment of prediction errors in conservation presence/absence models. Environ. Conserv. 24, 38–49 (1997).
Pearce, J. & Ferrier, S. An evaluation of alternative algorithms for fitting species distribution models using logistic regression. Ecol. Modell. 128, 127–147 (2000).
Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychosoc. Meas. 20, 37–46 (1960).
Liu, C., Berry, P. M., Dawson, T. P. & Pearson, R. G. Selecting thresholds of occurrence in the prediction of species distributions. Ecography. 28, 385–393 (2005).
Hiemstra, P. H., Pebesma, E. J., Twenhöfel, C. J. W. & Heuvelink, G. B. M. Real-time automatic interpolation of ambient gamma dose rates from the Dutch radioactivity monitoring network. Comput. Geosci. 35, 1711–1721 (2009).
Langlois, T. J. et al. Cost-efficient sampling of fish assemblages: comparison of baited video stations and diver video transects. Aquat. Biol. 9, 155–168 (2010).
Acknowledgements
We thank the crew of fishing vessel ‘Hannah Lee’ (Robert and Jason Stone) for support in the field. We are also grateful to the staff and volunteers of the Fish Ecology Lab at Curtin University for their help with data collection and video analysis. In particular Damon Driessen, Laura Fullwood, Elizabeth Myers, Lauren Munks, Elica Pereira Carvalho, Jamie Mcwilliam, Robert Handasyde. A special thank you to Shanta Barley and Xenia Gonzalez for proofreading and commenting on the manuscript. Part of the data used in this research was collected for the Marine Biodiversity Hub, a collaborative partnership supported through funding from the Australian Government’s National Environmental Research Program (NERP), administered by the Department of the Environment. NERP Marine Biodiversity Hub partners include the Institute for Marine and Antarctic Studies, University of Tasmania; CSIRO, Geoscience Australia, Australian Institute of Marine Science, Museum Victoria, Charles Darwin University and the University of Western Australia.
Author information
Authors and Affiliations
Contributions
E.S.H. and R.G. collected the data. R.G. conceived and executed the data analyses, wrote and edited the manuscript. B.T.R. provided guidance with data analyses. S.K.W. assisted with interpretation and structure of the manuscript. All co-authors reviewed and commented on the manuscript.
Corresponding author
Ethics declarations
Competing Interests
The authors declare that they have no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Galaiduk, R., Radford, B.T., Wilson, S.K. et al. Comparing two remote video survey methods for spatial predictions of the distribution and environmental niche suitability of demersal fishes. Sci Rep 7, 17633 (2017). https://doi.org/10.1038/s41598-017-17946-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-017-17946-2
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
