自动驾驶中激光雷达简介

一、雷达的基本概念
激光雷达(Lidar)的测量模型为距离-方位角-俯仰角模型(Range-Azimuth-Elevation, RAE)。其中P是激光雷达(Lidar)的观测点,r是P点距离激光雷达(Lidar)传感器的距离,它通过激光脉冲传播的时间乘以光速除以2获得; α是方位角(Azimuth),ε是俯仰角(Elevation), α 和ε是激光束的发射角度
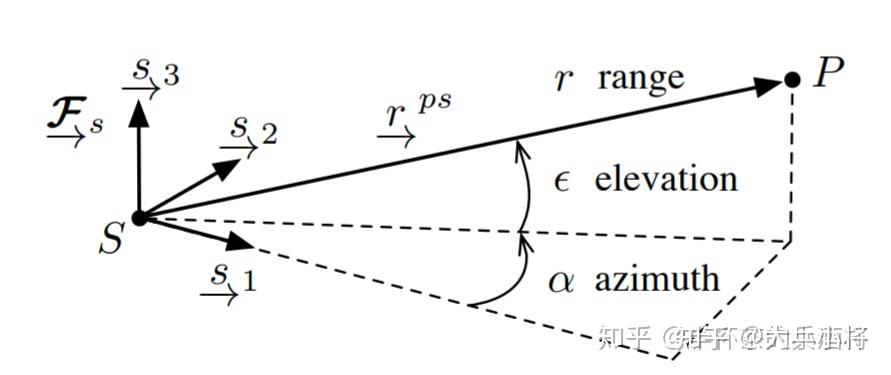
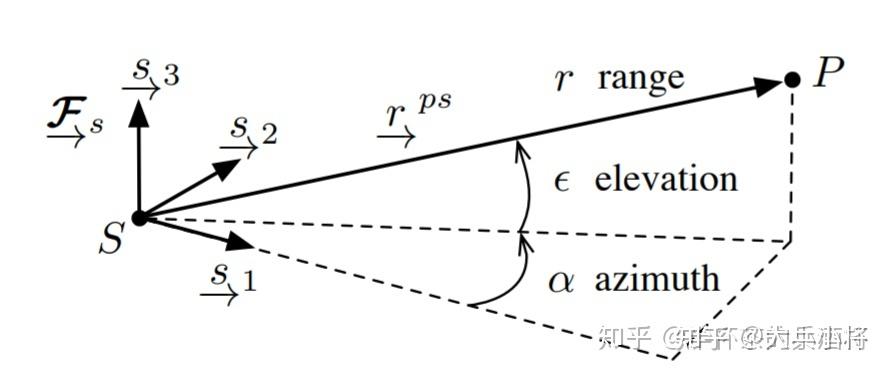
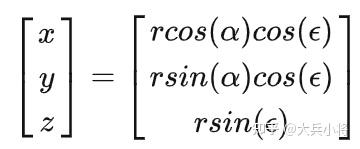
点P在激光雷达(Lidar)坐标系 下的坐标为: (x, y, z),坐标值与测量值之间的关系为
二、激光雷达的属性
1、测量距离:激光雷达的感知范围,能探测多远,目前主流的是150m。
2、测距精度:激光雷达对探测距离的精确度,目前主流是厘米级的精度。
3、水平视场角:激光雷达的水平视野角度(AOB),相当于我们人眼的横向视野,最高360度。
4、垂直视场角:激光雷达的垂直视野角度(BOC),相当于我们人眼的竖向视野。越大越好,目前主流为30度/15度。垂直视场角和水平视场角合称为视场角度,我们经常看到的FOV,说的就是它,表示激光雷达的总视野。
5、测量时间和帧频率:激光雷达的激光从发射到返回的时间,相当于一个测量周期所花费的时间。时间越短对运动信息的采集就越好,高速行驶时的反应时间就越短。
6、纵向和水平分辨率:也叫角分辨率,相当于我们显示器的分辨率,度数越小,得到的图像就越清晰。目前主流的激光雷达一般为0.1~1度。
7、出点数:激光雷达每秒发射的激光点数,点数越多激光就可以越密集。目前主流激光雷达可以每秒发出几万点至几十万点激光。
8、线束:也叫等效点云密度,是激光雷达垂直方向上的激光的分布数量,一般为16线、32线、64线,越多越好。
线束、方位角、扫描帧频、角分辨率、测量精度、探测距离、数据率是七个常用的激光雷达性能评价指标。
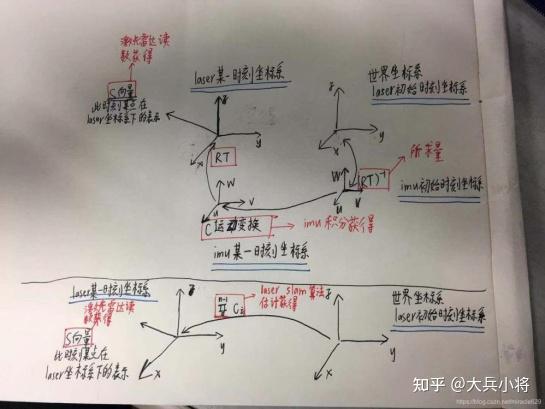
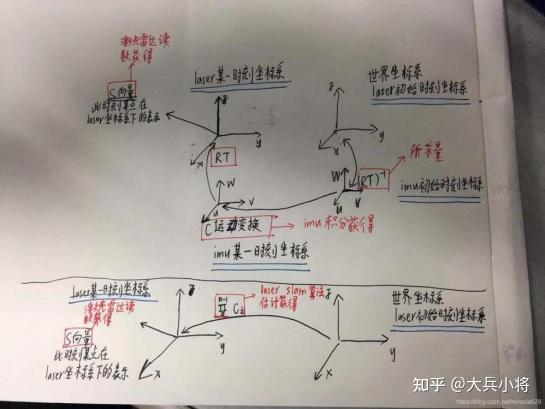
三、激光雷达的内外参


1、常用的外参标定方法
四、机械式激光雷达
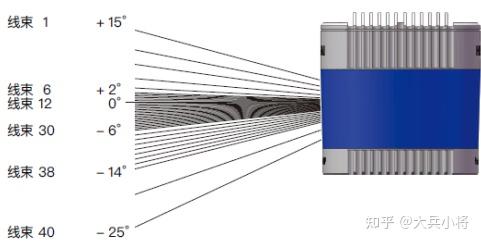
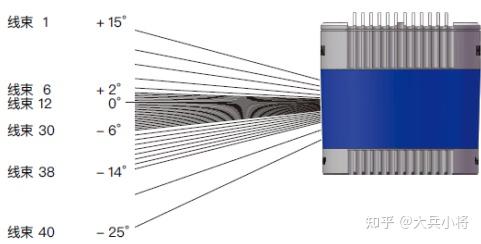
机械式激光雷达以一定的速度旋转,在水平方向采用机械 360°旋转扫描,在垂直方向采用定向分布式扫描以搜集动态信息。
扫描方式
机械旋转式激光雷达是目前市场上比较成熟的方案。但是由于光学部分,电子部分和机械结构都是旋转工作的,对机械结构件加工精度要求很高,而且,由于中心不对称,属于偏心转动,长期器件磨损很严重,可靠性相对较低
五、固态激光雷达


固态激光雷达分为 OPA 固态激光雷达和 Flash 固态激光雷达
1、其中 OPA技术原理与相控阵雷达类似,它由元件阵列组成,通过控制每个元件发射光的相位和振幅来控制光束,无需任何机械部件;
2、Flash 面阵式激光雷达不同于以上三种逐点扫描的模式,它利用激光器同时照亮整个场景,对场景进行光覆盖,一次性实现全局成像

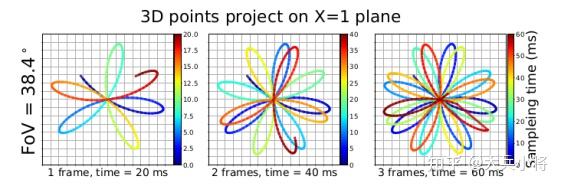
特征点提取仍然参照 LOAM,对每个点计算局部曲率,以此来提取平面特征点和边缘特征点;但是,对 Mid-40 雷达来说,花瓣状的扫描方式决定了其中某些点不适合用于提取特征,具体来说,这些不适合的点包括 4 类:「视场边缘的点、反射强度过大或过小的点、入射角过大的点、被遮挡的点」,因此,Loam_livox 首先剔除这 4 类点(叫作 Points Selection),并将连续的扫描在“拐点”(花瓣尖的位置)处打断,获得一个个分段的弧线,然后对各个弧线上的点做曲率计算,提取两类特征点。额外地,由于 Mid-40 视场角实在太小了,很容易发生特征点不足的情况,于是 Loam_livox 额外引入强度信息来提取特征点,原理是计算点的“强度值曲率”,这种特征点体现了不同材质的交界处的信息,在类似雷达照向一面墙的场景下有助于提供更多的特征。
六、机械与固态的区别与联系


1、由于内部结构有所差别,两种激光雷达的大小也不尽相同,机械激光雷达体积更大,总体来说价格更为昂贵,但测量精度相对较高。而固态激光雷达尺寸较小,成本低,但测量精度相对会低一些。
2、相比固态激光雷达,机械激光雷达有一个更为明显的优势就是其360°视场,可以在机器人或汽车的顶部固定安装一个激光雷达,便可360°感知周围环境,反观固态激光雷达,需要固定在某些适当的位置,视场角一般在120°以内,因此,如应用于无人车中,至少需要用到4台才能达到机械式激光雷达一样的覆盖范围,数量越多,也意味着成本越高
3、固态雷达建图的劣势,各个雷达间外参较多,反而影响建图精度
4、固态的扫描方式决定某些特征点不可靠
5、固态扫描线束较少,不够丰富,使得匹配困难
七、雷达的误差分析
1、光束模型误差
1)激光雷达(Lidar)发送和接收激光束的精确耗时误差。受限于激光雷达(Lidar)配备的计时设备的精度,耗时统计存在精度上限
2)激光雷达(Lidar)激光束的朝向误差。受限于激光雷达朝向测量设备的测量精度,朝向测量存在精度上限
3)目标材质的反射值特性。比如全黑的材料吸收了光的大部分能量,使得反射量极低;或者像镜子一样的材料会将大部分光反射到其它地方,从而使得激光雷达无法测量到这些物体的位置
2、运动误差
由于激光雷达在跟随自动驾驶车辆前进的同时,对周围环境进行扫描建模,也就是说车辆相对于周围的环境是运动的,导致对环境测量的实际位置与真实位置存在偏差。即存在运动畸变。
八、激光雷达的优缺点
激光雷达具有如下优点:
1)可直接产生丰富的空间数据,如点的3D坐标和纹理等;
2)因为分辨率较高(距离、角度和速度),所以精度高、实时性好;
3)抗干扰能力强,因激光波长较短,一定程度减小了多路效应;
4)不受光照强度影响;
5)体积小,安装方便。
但也有一些缺点:
1)受环境中气候的影响较大,如在雨、雪、雾、尘等极端天气下,传播距离会急剧衰减;2)价格高,这是目前很多汽车厂商(如TESLA)试图寻找其他定位方案的重要原因;
3)数据量较大,需要高效的处理流程。
3、在广场等全空旷区域,只能看到部分地面上的点云,导致在水平面上发生漂移;
4、长直走廊或隧道、单侧墙、桥梁等场地中,激光匹配会存在一个方向上的额外自由度,造成激光在纵向上发生漂移;
5、在弧形走廊、转弯等异形建筑物前,比如,弧形墙接近于圆弧形时,约束缺失,类似于两个圆弧相对旋转并不影响定位精度;
6、雨雪、沙尘等恶劣天气场景下,激光会出现折射现象,此时也会影响定位的精度;
7、人为遮挡、机器故障、外参变化也会对定位精度产生很大的影响;
8、激光垂直分辨率不高,地面和激光雷达的夹角是比较大时,激光点的误差比较大。 因此容易产生z轴漂移现象。
九、激光雷达在定位中未来的应用场景
1、因自动驾驶对定位精度有较高的要求,所以激光雷达发挥越来越重要的作用。目前在RTK信号缺失时,使用激光雷达和高精地图进行匹配是主流的高精定位方式
2、机械式的激光雷达现阶段比较成熟,但因其旋转部件成本较高,低成本的固态式的激光雷达获得了逐步发展的机会。不过固态激光雷达也有自身的局限性,如水平视角(小于180°)不如机械式的激光雷达。所以多个固态激光雷达组合使用,可能是未来一种成本低、覆盖范围广的高精度定位方式
发布于 2023-02-18 16:46・IP 属地江苏
